基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法
- 国知局
- 2024-07-31 17:27:39
本发明涉及永磁同步电机控制,特别是涉及一种基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法。
背景技术:
1、永磁同步电机具有结构简单、功率密度高等特点,是新能源汽车驱动电机的主流趋势,其常见的驱动方式为矢量控制技术和直接转矩控制技术。
2、矢量控制技术是一种通过将电机控制转化为旋转坐标系(通常是dq轴)中的矢量运算来实现的方法。这种方法可以精确控制电机的转矩和磁通,提高电机的性能和效率。然而,这种方法可能因电机运行时温度升高导致电机参数发生变化从而影响转矩控制精度。
3、直接转矩控制通过直接控制电机的定子电流和电压来实现转矩控制,不需要使用速度或位置反馈。然而,新能源汽车永磁同步电机驱动系统的运行工况复杂,在低转速和低负载下可能出现转矩和电流的波动。
4、针对新能源汽车用永磁同步电机的转矩控制问题,国内外研究人员提出了许多行之有效的方法,如自抗扰控制、滑模控制和pid方法等,然而,现有方法在永磁同步电机转矩控制暂态性能改善和稳态精度的提高方面还存在如下技术问题:
5、(1)基于观测器的主动抗干扰方法,如扩张状态观测器(eso)方法,主要通过增大观测器带宽来提高扰动估计精度,但带宽增大会导致放大噪音,从而影响控制精度;
6、现有大多数抗扰方法不适用于输出端的噪声抑制,同时也无法辨识出系统的参数。
7、(2)在永磁同步电机驱动系统中,pid控制器需要合适的参数来确保系统稳定性和性能。其参数的调整可能较为困难,特别是在非线性效应较强的情况下。同时pid控制器的性能受到负载变化的影响较大。负载变化可能导致系统动态响应速度变化,从而影响控制器的性能。
8、(3)在有限集模型预测转矩控制中,单矢量控制方式是每个控制周期只能输出一个电压矢量,其转矩波纹较大。传统双矢量控制方式是寻找有源电压矢量和零矢量共同作用一个控制周期,但是无法保证其矢量组合能够达到最优转矩控制性能。
9、因此,针对复杂环境下新能源汽车车用永磁同步电机,研究具有主动抗干扰能力的转矩控制优化方法,具有很重要的实践意义和应用价值。
技术实现思路
1、针对上述要解决的技术问题,本发明提供一种基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,转矩控制性能好、响应快、误差小。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,包括以下步骤:
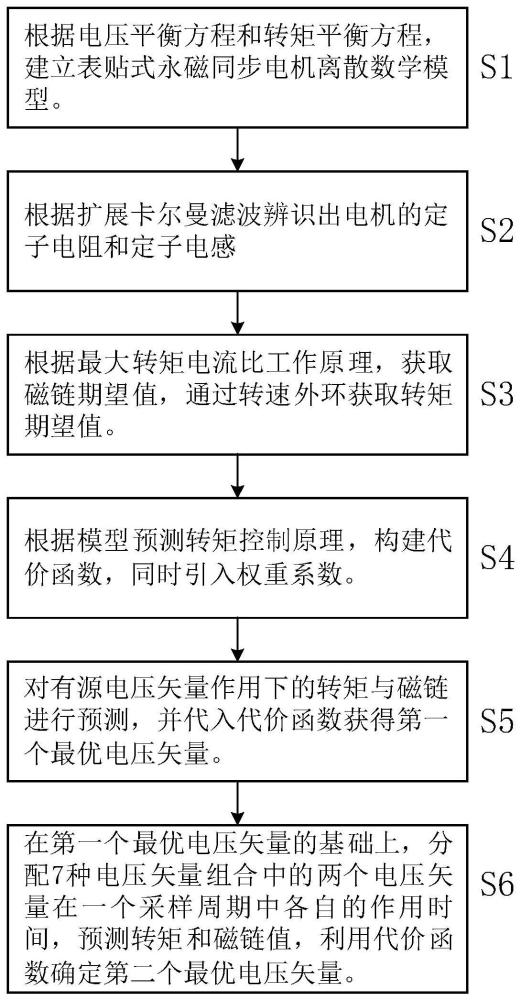
4、步骤s1,构造电压平衡方程和转矩方程,获得表贴式永磁同步电机离散数学模型;
5、步骤s2,根据扩展卡尔曼滤波工作原理辨识出电机的定子电阻和定子电感;
6、步骤s3,根据最大转矩电流比工作原理,采用id*=0策略获得磁链期望值,转矩期望值由转速环获取;
7、步骤s4,根据模型预测工作原理,构建代价函数,同时引入权重系数;
8、步骤s5,将有源电压矢量和辨识的参数代入电压平衡方程算出电流预测值,并对转矩和磁链进行预测,代入代价函数获得第一个最优电压矢量;
9、步骤s6,在第一个最优电压矢量的基础上,分配7种电压矢量组合中的两个电压矢量在一个采样周期中各自的作用时间,预测在7种电压矢量组合作用下的转矩值和磁链值,并根据代价函数来确定第二个最优电压矢量。
10、作为上述技术方案地进一步改进为:
11、优选地,所述步骤s1中,构造电压平衡方程和转矩方程,利用欧拉差分法获得表贴式永磁同步电机离散数学模型:
12、
13、其中,r为定子电阻,l为定子电感,we为电角速度,ψf为永磁体磁链,pn为极对数,ud(k-1)和uq(k-1)为dq轴下k-1时刻的定子电压,te(k)为k时刻电磁转矩,id(k)和iq(k)为dq轴下k时刻的定子电流,ts为采样周期。
14、考虑定子电阻r和定子电感l在一个控制周期内不发生变化,可由下式表示:
15、
16、其中,
17、优选地,所述步骤s2中,采用扩展卡尔曼滤波辨识电机的定子电阻和定子电感,具体步骤如下:
18、步骤s21,选取状态变量矩阵,在有过程噪声干扰的情况下获取系统状态实际值;
19、步骤s22,在未考虑过程噪声干扰的情况下,通过数学模型得到状态变量的先验估计值;
20、步骤s23,选取系统输出变量矩阵,得到实际的系统输出状态值;在未考虑测量噪声干扰的情况下,得到测量状态估计值;
21、步骤s24,对先验状态估计和测量状态估计进行数据融合,得到状态变量的后验估计值;
22、步骤s25,将先验估计值和后验估计值与实际值之间的误差定义为先验误差和后验误差,并计算出先验误差的协方差矩阵和后验误差的协方差矩阵;
23、步骤s26,求解后验协方差矩阵的迹的偏导数,获取最优估计的扩展卡尔曼滤波增益。
24、优选地,所述步骤s5中,具体包括:
25、步骤s51,将辨识出的定子电阻和电感代替失配的电阻和电感,根据离散数学模型,在有源电压矢量的作用下得到k+1时刻定子电流值;
26、步骤s52,结合电磁转矩方程和磁链方程得到转矩预测值和磁链预测值;
27、步骤s53,将预测的转矩和磁链代入代价函数进行计算,选取使目标函数最小的矢量作为第一个最优电压矢量。
28、优选地,所述步骤s6中,根据转矩无差拍原理和磁链方程,计算出两个电压矢量同时作用一个采样周期时转矩预测值和磁链预测值。
29、优选地,所述步骤s6中,具体包括以下步骤:
30、步骤s61,对永磁同步电机的转矩方程求导,得到在电压矢量作用下的转矩变化率;
31、步骤s62,采用转矩无差拍计算第一个最优电压矢量的作用时间,将其与7种电压矢量分别组合,并且预先分配每个组合中两个电压矢量各自的作用时间,得出两个电压矢量合成后在dq轴上的分量;
32、步骤s63,在双矢量电压作用下,根据离散数学模型计算电流的预测值;
33、步骤s64,根据转矩无差拍原理和磁链方程,得到转矩预测值和磁链预测值;
34、步骤s65,将转矩预测值和磁链预测值代入代价函数进行计算,选择使代价函数最小的电压矢量作为第二个最优电压矢量。
35、本发明提供的基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,与现有技术相比,有以下优点:
36、(1)本发明的基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,所提出的扩展卡尔曼滤波能够在线辨识电机参数,即在一定程度上提高控制算法的鲁棒性,又可以为电机的早期故障提供诊断信息,同时在辨识过程中抑制输出噪声,能够改善新能源汽车车用永磁同步电机的稳态性能。
37、(2)本发明的基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,所提出的模型预测转矩控制能够提高电机系统的性能、效率和响应速度。而且模型预测控制具有较强的适应性,它可以根据系统的实时状态和外部扰动进行调整,实现电机系统的智能、高效、稳定的控制,以满足不同应用场景下的性能要求。
38、(3)本发明的基于卡尔曼滤波的永磁同步电机模型预测转矩控制方法,所提出的改进型双矢量控制能够有效地抑制永磁同步电机的转矩波动,同时在价值函数中考虑两个电压矢量作用时间的影响,使得转矩控制效果进一步提升。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175612.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表