风电机组调频优化与载荷抑制的联合控制方法
- 国知局
- 2024-07-31 17:30:17
本发明属于风力发电,具体涉及风电机组调频优化与载荷抑制的联合控制方法。
背景技术:
1、风电机组通过电力电子装置与电网连接,机组转子转速与电网频率分离,不能主动响应频率变化。随着风电接入比例的持续攀升,电力系统惯量减弱、扰动功率提升和备用容量不足等问题日益凸显,导致传统电力调频方式并不能完全适应风电接入。为了开发风电机组的频率调节能力,需要在风电机组控制系统中增加辅助调频手段,当出现频率波动时机组能够快速调节有功输出,响应频率变化。
2、然而,风电机组的调频控制策略将系统频率与机电系统重新耦合,当机组在响应系统频率变化时快速的有功变化使发电机电磁转矩大幅度变化,而电磁转矩变化会加剧传动轴扭矩和塔架侧向弯矩波动,导致风电机组的传动轴系和塔架承受着剧烈的冲击载荷,引起疲劳载荷快速累积。疲劳载荷的累积不仅影响着风电机组的稳定运行和使用寿命,而且还会带来安全隐患和经济损失。
3、目前,虽然提出了较多关于风电机组的调频优化技术,有效提升了风电机组频率支撑能力,但未能考虑到风电机组调频对机械载荷的影响。因此,迫切需要一种风电机组调频优化协同机械载荷抑制的控制技术,在优化风电频率支撑能力的同时有效降低机械载荷冲击,从而提高电力系统频率稳定性,保障风电机组的安全运行与健康寿命。
技术实现思路
1、本发明的目的在于提供风电机组调频优化与载荷抑制的联合控制方法,能有效提升风电机组的调频能力,并抑制风电机组调频期间的机械载荷冲击,提高电力系统频率稳定性。
2、本发明所采用的技术方案是,风电机组调频优化与载荷抑制的联合控制方法,具体按照以下步骤实施:
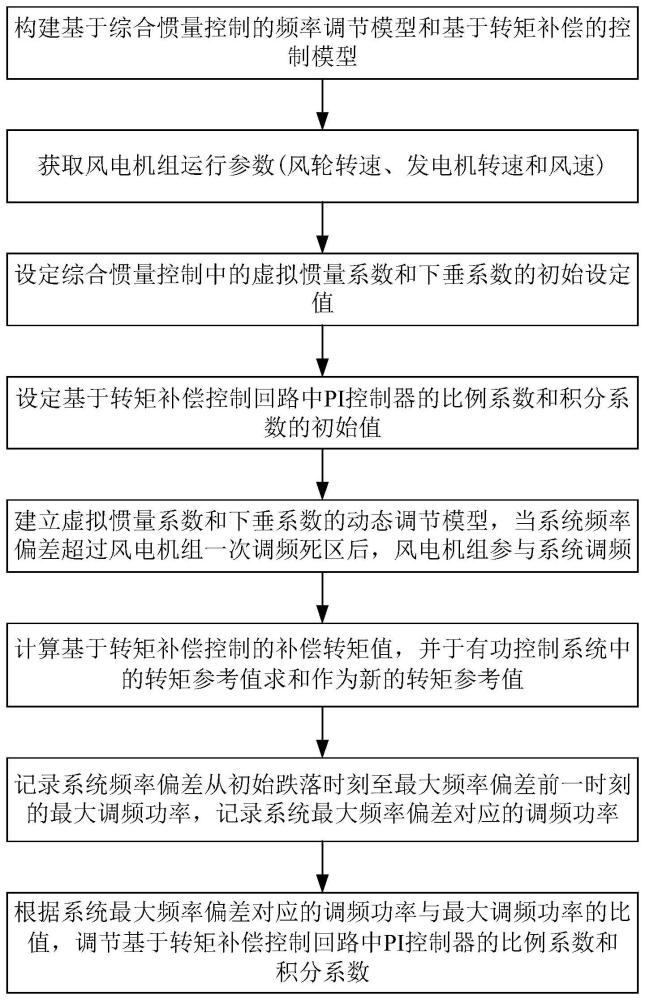
3、步骤1:在风电机组有功控制系统中引入综合惯量控制,构建基于转矩补偿的控制模型;
4、步骤2:获取风轮转速、发电机转速和风速;
5、步骤3:设定综合惯量控制中的虚拟惯量系数和下垂系数的初始设定值,设定补偿转矩的最大限值,设定基于转矩补偿控制回路中pi控制器的比例系数和积分系数的初始值;
6、步骤4:计算调频参数优化后的调频功率值;将调频功率值与有功控制下的功率参考值叠加,得到新的功率给定值;
7、步骤5:计算基于转矩补偿控制的补偿转矩值,与有功控制系统的电磁转矩参考值te-ref叠加作为新的转矩参考值;
8、步骤6:记录一段时段内的最大调频功率,记录对应的调频功率;
9、步骤7:调节转矩补偿回路中pi控制器的比例系数和积分系数。
10、本发明的特点还在于,
11、步骤1中,具体为:
12、风电机组有功控制系统包含最大功率点跟踪控制和变流器控制系统,采用叶尖速比法实现mppt控制,保持叶尖速比为最优值λopt,得到风力机转速参考值ωm-ref,其中,ωm-ref=λoptv/r,v为当前风速,r为风轮旋转半径;风力机转速参考值ωm-ref与当前风轮转速ωm比较后经有功控制环pi控制器得到电磁转矩参考值te-ref,将电磁转矩参考值te-ref与发电机转速ωr相乘得到功率参考值popt,作为变流器控制系统的给定功率,最终实现对发电机输出功率的控制;综合惯量控制根据系统频率变化率df/dt和频率偏差δf得到调频功率指令pf,将调频功率指令pf与功率参考值popt叠加后作为新的给定功率;基于转矩补偿的控制模型是在机组有功控制环增加一条支路,将风轮转速ωm和发电机转速ωr的偏差作为输入信号,经pi调节后得到补偿转矩。
13、步骤3中,虚拟惯量系数的初始值ki0根据风电机组等效惯性时间常数hw计算得到,如式(1)所示:
14、
15、式中,jw为折算到低速轴的风机等效转动惯量,ωm0为调频初始时刻对应的风轮转速,ωm-min为转速下限,prate为风电机组额定功率,frate为系统额定频率;
16、下垂系数的初始值kd0一般在20~50之间;
17、基于转矩补偿控制回路中pi控制器的比例系数和积分系数的初始值计算过程如下:
18、采用两质量块传动轴模型描述传动轴系的动态特性,,如式(2)所示:
19、
20、式中,jm、jr分别为风轮、发电机转动惯量,tm、ts、te分别为风力机机械转矩、传动轴扭矩、发电机电磁转矩,kd、cd分别为低速轴等效刚度、等效阻尼,θs为轴系扭转角;
21、采用基于转矩补偿的控制模型后,传动轴系扭角与电磁转矩之间的闭环传递函数g′te(s),如式(4)所示;
22、
23、式中,kps为转矩补偿控制回路中pi控制器的比例系数,kis为转矩补偿控制回路中pi控制器的积分系数;s为拉普拉斯算子;
24、根据式(4)可得传动轴系阻尼比ξs′,如式(5)所示;
25、
26、式中,jw为折算到低速轴的风机等效转动惯量;
27、为得到比例系数和积分系数的初始值,将传动轴系阻尼比设定在0.3~0.707之间,将补偿转矩的最大限值设定在额定电磁转矩te-rate的2%以内,以轴系阻尼比最大为目标,建立优化模型,如式(6)所示;
28、
29、步骤4中,具体为:
30、建立虚拟惯量系数和下垂系数的动态调节模型,当系统频率偏差超过风电机组一次调频死区后,计算调频参数优化后的调频功率值;将调频功率值pf与有功控制下的功率参考值popt叠加,得到新的功率给定值;
31、虚拟惯量系数的动态调节模型,如式(7)所示;
32、
33、式中,ki为虚拟惯量系数;
34、下垂系数的动态调节模型,如式(8)所示;
35、
36、式中,kd为下垂系数,t0为系统频率初始跌落时刻,tnadir为系统最大频率偏差对应时间,tend为调频结束时刻;
37、检测系统频率偏差是否超过风电机组一次调频死区,超过风电机组一次调频死区后风电机组参与系统调频,根据调频参数优化方法,得到调频功率值pf,如式(9)所示;
38、pf=-ki df/dt-kdδf (9);
39、式中,df/dt为系统频率变化率,δf为系统频率偏差。
40、步骤5中,计算基于转矩补偿控制的补偿转矩值,如式(10)所示:
41、
42、式中,ng为齿轮箱变速比。
43、步骤6中,具体为:记录t0~tnadir时段内的最大调频功率,记作pf-max,记录tnadir对应的调频功率,记作和pf1。
44、步骤7中,具体为:根据步骤6得到的pf-max和pf1,调节转矩补偿控制回路中pi控制器的比例系数kps和积分系数kis;如式(11)及式(12)所示;
45、
46、
47、本发明的有益效果是:
48、本发明的风电机组调频优化与转矩补偿的联合控制方法,调频参数优化方法提升系统频率最低点的同时增强了退出调频后转速恢复性能,基于转矩补偿的控制回路中pi控制器的比例系数和积分系数为传动轴系提供了电气阻尼和电气刚度,通过增加轴系阻尼比的方式削减了轴系扭矩和塔架左右方向弯矩的振幅和振荡时间,联合调频参数优化方法与基于转矩补偿的控制方法,改善风电机组频率支撑能力的同时,减轻了风电机组频率支撑期间传动轴系和塔架的冲击载荷。此外,本发明中采用pi调节的转矩补偿控制方式易于工程实现,避免了复杂的计算过程和数据处理对风电机组主控制器的资源占用。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175814.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。