一种碳化硅功率模组的多级主动热管理方法、装置及介质与流程
- 国知局
- 2024-07-31 17:31:15
本发明涉及功率变换,具体涉及一种碳化硅功率模组的多级主动热管理方法、装置及介质。
背景技术:
1、电力系统呈现“双高”趋势,分布式新能源、不平衡/非线性负荷、储能等大规模接入配网,基于电力电子变流器的新能源并网装置、电能质量治理装置、柔性互联装置等已成为解决分布式能源高效消纳、提升供电质量、保障配网稳定运行的重要手段。
2、由于硅基器件的局限性,传统功率变换器存在成本高、效率低、体积大、可靠性差等问题。要求电力电子装置具有更高的电压、更大的功率容量以及更高的可靠性,这对高压大功率器件及模组提出了更高的性能要求。近20多年来,碳化硅作为一种宽禁带功率器件,受到人们越来越多的关注。与硅相比,碳化硅具有很多优点,如:碳化硅的禁带宽度更大,这使碳化硅器件拥有更低的漏电流及更高的工作温度,抗辐照能力得到提升;碳化硅材料击穿电场是硅的10倍,因此,其器件可设计更高的掺杂浓度及更薄的外延厚度,与相同电压等级的硅功率器件相比,导通电阻更低;碳化硅具有高电子饱和速度的特性,使器件可工作在更高的开关频率;同时,碳化硅材料更高的热导率也有助于提升系统的整体功率密度。因此,碳化硅功率器件十分适合于构建高效紧凑的配电网用功率模组。
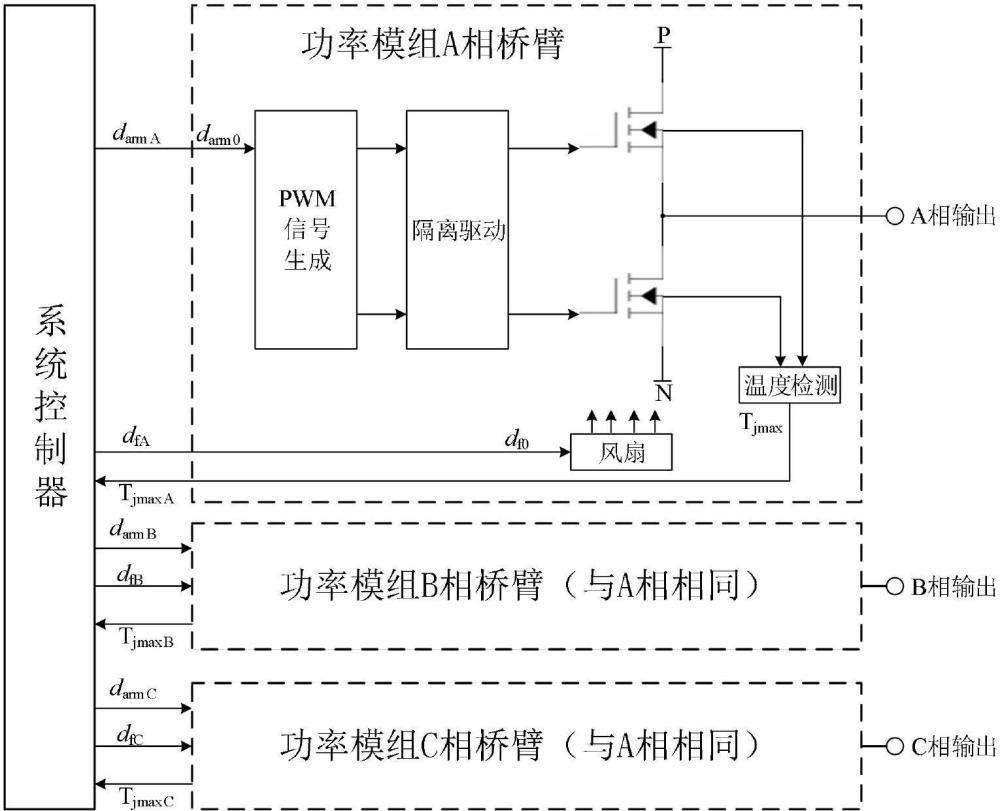
3、同等容量下,碳化硅芯片的面积比传统硅器件的要小得多,这导致功率模组的热管理面临较大挑战。现有的硅基功率模组一般采用可调速风扇对功率模组的散热器进行降温。如图1所示,通过系统控制器监测器件结温或者散热器温度对风扇转速进行调节,当结温过高时功率模组降额或停机运行。然而,对于碳化硅功率模组,这样的热管理方案面临如下问题:
4、1)系统控制器需要实时监控模组状态并进行控制,系统控制复杂度高。
5、2)碳化硅功率模组适用的环境温度较宽,如果主要依靠散热风扇进行热管理,则需要配置较大风扇容量才能实现高环境温度下的可靠工作,此时风扇附加的成本和损耗较大。
6、3)降额运行虽然可以有效降低模组的损耗进而降低器件结温,但不同环境温度、不同工况下器件的损耗特性不同,如何实现最优的降额运行成为难点,目前一般是根据经验设定降额系数,这种设置要么会导致降额过多影响模组出力、要么降额过少,导致器件结温无法降低到安全阈值之内。
技术实现思路
1、本发明的目的在于提供一种碳化硅功率模组的多级主动热管理方法、装置及介质,根据器件结温的不同自适应依次调节风扇转速、模组载波频率、桥臂占空比,无需系统控制器干预即保证器件结温处于安全阈值之下,同时最小化风扇的损耗和成本、模组的出力损失。
2、第一方面,本发明提供一种碳化硅功率模组的多级主动热管理方法,包括如下步骤:
3、s1:获取桥臂最大结温tjmax,并根据桥臂最大结温tjmax产生限幅后的调速占空比信号df1,df1用于实现风扇转速调节;
4、s2:根据限幅后的调速占空比信号df1和未限幅的散热风扇调速占空比信号df0的差值,生成修正后的载波频率fc1;所述修正后的载波频率fc1用于实现风扇转速调节;
5、s3:根据限幅后的载波频率附加信号δfc1和未限幅的载波频率附加信号δfc0的差值,产生桥臂附加占空比信号δdarm,并根据桥臂附加占空比信号δdarm与未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1;
6、s4:根据修正后的桥臂占空比darm1和修正后的载波频率fc1生成上桥臂开关和下桥臂开关的pwm驱动信号,并基于所述上桥臂开关和下桥臂开关的pwm驱动信号,驱动桥臂开关。
7、在一种实施例中,获取桥臂最大结温tjmax,并根据桥臂最大结温tjmax产生限幅后的调速占空比信号df1,包括:
8、s1.1:通过2个热传感器分别监测上桥臂开关的结温tjp和下桥臂开关的结温tjn,取tjp和tjn两者中较大值作为桥臂最大结温tjmax;
9、s1.2:根据下式产生未限幅的散热风扇调速占空比信号df0:
10、
11、其中kpf为风扇转速调节器的比例调节系数,kif为风扇转速调节器的积分调节系数;
12、s1.3:对未限幅的散热风扇调速占空比信号df0进行限幅运算得到限幅后的调速占空比信号df1:
13、
14、s1.4:将限幅后的调速占空比信号df1输入桥臂模组的散热风扇,调节风扇转速。
15、在一种实施例中,s2:根据限幅后的调速占空比信号df1和未限幅的散热风扇调速占空比信号df0的差值,生成修正后的载波频率fc1,包括:
16、s2.1:根据限幅后的调速占空比信号df1和未限幅的调速占空比信号df0,计算载波频率控制器的调节信号ec:
17、
18、s2.2:根据载波频率控制器的调节信号ec产生未限幅的载波频率附加信号δfc0
19、
20、其中,kpc为载波频率调节器的比例调节系数,kic为载波频率调节器的积分调节系数;
21、s2.3:对未限幅的载波频率附加信号δfc0进行限幅运算得到限幅后的载波频率附加信号δfc1:
22、
23、其中,为允许的最大载波频率调节值;限幅后的载波频率附加信号δfc1与桥臂的额定载波频率fc0相加后得到修正后的载波频率fc1;
24、s2.4:调节碳化硅功率模组的载波频率为修正后的载波频率fc1。
25、在一种实施例中,根据限幅后的载波频率附加信号δfc1和未限幅的载波频率附加信号δfc0的差值,产生桥臂附加占空比信号δdarm,并根据桥臂附加占空比信号δdarm与未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1,包括:
26、s3.1:根据未限幅的载波频率附加信号δfc1和限幅后的载波频率附加信号δfc0的差值,计算附加桥臂占空比的调节信号ed:
27、
28、s3.2:根据附加桥臂占空比的调节信号ed产生桥臂占空比的修正信号δdarm:
29、
30、其中kpd为附加桥臂占空比的比例调节系数,kid为附加桥臂占空比的积分调节系数;
31、s3.3:根据桥臂占空比的修正信号δdarm和未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1:
32、。
33、在一种实施例中,根据修正后的桥臂占空比darm1和修正后的载波频率fc1生成上桥臂开关和下桥臂开关的pwm驱动信号,并基于所述上桥臂开关和下桥臂开关的pwm驱动信号,驱动桥臂开关,包括:
34、s4.1:由修正后的载波频率fc1生成三角载波信号sc,其频率为fc1、最小值为0、最大值为1;
35、s4.2:将三角载波信号sc与修正后的桥臂占空比darm1作比较产生上桥臂的原始pwm信号sp0,产生规则为:当darm1≥sc时,sp0为高电平,否则sp0为低电平;
36、s4.3:对上桥臂的原始pwm信号sp0取反可得其互补信号下桥臂的原始pwm信号sn0;
37、s4.4:对上桥臂的原始pwm信号sp0和下桥臂的原始pwm信号sn0均延时tdead时间,产生延时后的上桥臂pwm信号sp1和延时后的下桥臂pwm信号sn1;
38、s4.5:将上桥臂的原始pwm信号sp0和延时后的上桥臂pwm信号sp1进行与运算,产生上桥臂开关的pwm信号sp;将下桥臂的原始pwm信号sn0和延时后的下桥臂pwm信号sn1进行与运算,产生下桥臂开关的pwm信号sn;
39、s4.6:基于上桥臂开关的pwm信号sp以及下桥臂开关的pwm信号sn分别控制上桥臂开关和下桥臂开关。
40、在一种实施例中,所涉及的比例-积分控制器关系满足:
41、
42、其中,kpc为载波频率调节器的比例调节系数,kic为载波频率调节器的积分调节系数,kpd为附加桥臂占空比的比例调节系数,kid为附加桥臂占空比的积分调节系数。
43、第二方面,本发明提供一种碳化硅功率模组的多级主动热管理装置,包括:
44、第一级热管理模块,用于:获取桥臂最大结温tjmax,并根据桥臂最大结温tjmax产生限幅后的调速占空比信号df1,df1用于实现风扇转速调节;
45、第二级热管理模块,用于:根据限幅后的调速占空比信号df1和未限幅的散热风扇调速占空比信号df0的差值,生成修正后的载波频率fc1;所述修正后的载波频率fc1用于实现风扇转速调节;
46、第三级热管理模块,用于:根据限幅后的载波频率附加信号δfc1和未限幅的载波频率附加信号δfc0的差值,产生桥臂附加占空比信号δdarm,并根据桥臂附加占空比信号δdarm与未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1;
47、驱动模块,用于:根据修正后的桥臂占空比darm1和修正后的载波频率fc1生成上桥臂开关和下桥臂开关的pwm驱动信号,并基于所述上桥臂开关和下桥臂开关的pwm驱动信号,驱动桥臂开关。
48、在一种实施例中,所述第一级热管理模块获取桥臂最大结温tjmax,并根据桥臂最大结温tjmax产生限幅后的调速占空比信号df1的方法包括:
49、通过2个热传感器分别获取上桥臂开关的结温tjp和下桥臂开关的结温tjn,取tjp和tjn两者中较大值作为桥臂最大结温tjmax;
50、根据下式产生未限幅的散热风扇调速占空比信号df0:
51、
52、其中kpf为风扇转速调节器的比例调节系数,kif为风扇转速调节器的积分调节系数;
53、对未限幅的散热风扇调速占空比信号df0进行限幅运算得到限幅后的调速占空比信号df1:
54、
55、将限幅后的调速占空比信号df1输入桥臂模组的散热风扇,调节风扇转速。
56、在一种实施例中,所述第二级热管理模块根据限幅后的调速占空比信号df1和未限幅的散热风扇调速占空比信号df0的差值,生成修正后的载波频率fc1的方法包括:
57、根据限幅后的调速占空比信号df1和未限幅的调速占空比信号df0,计算载波频率控制器的调节信号ec:
58、
59、根据载波频率控制器的调节信号ec产生未限幅的载波频率附加信号δfc0
60、
61、其中,kpc为载波频率调节器的比例调节系数,kic为载波频率调节器的积分调节系数;
62、对未限幅的载波频率附加信号δfc0进行限幅运算得到限幅后的载波频率附加信号δfc1:
63、
64、其中,为允许的最大载波频率调节值;限幅后的载波频率附加信号δfc1与桥臂的额定载波频率fc0相加后得到修正后的载波频率fc1;
65、调节碳化硅功率模组的载波频率为修正后的载波频率fc1。
66、在一种实施例中,所述第三级热管理模块根据限幅后的载波频率附加信号δfc1和未限幅的载波频率附加信号δfc0的差值,产生桥臂附加占空比信号δdarm,并根据桥臂附加占空比信号δdarm与未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1的方法包括:
67、根据未限幅的载波频率附加信号δfc1和限幅后的载波频率附加信号δfc0的差值,计算附加桥臂占空比的调节信号ed:
68、
69、根据附加桥臂占空比的调节信号ed产生桥臂占空比的修正信号δdarm:
70、
71、其中kpd为附加桥臂占空比的比例调节系数,kid为附加桥臂占空比的积分调节系数;
72、根据桥臂占空比的修正信号δdarm和未修正的桥臂占空比darm0,计算修正后的桥臂占空比darm1:
73、。
74、在一种实施例中,所述驱动模块根据修正后的桥臂占空比darm1和修正后的载波频率fc1生成上桥臂开关和下桥臂开关的pwm驱动信号,并基于所述上桥臂开关和下桥臂开关的pwm驱动信号,驱动桥臂开关的方法包括:
75、由修正后的载波频率fc1生成三角载波信号sc,其频率为fc1、最小值为0、最大值为1;
76、将三角载波信号sc与修正后的桥臂占空比darm1作比较产生上桥臂的原始pwm信号sp0,产生规则为:当darm1≥sc时,sp0为高电平,否则sp0为低电平;
77、对上桥臂的原始pwm信号sp0取反可得其互补信号下桥臂的原始pwm信号sn0;
78、对上桥臂的原始pwm信号sp0和下桥臂的原始pwm信号sn0均延时tdead时间,产生延时后的上桥臂pwm信号sp1和延时后的下桥臂pwm信号sn1;
79、将上桥臂的原始pwm信号sp0和延时后的上桥臂pwm信号sp1进行与运算,产生上桥臂开关的pwm信号sp;将下桥臂的原始pwm信号sn0和延时后的下桥臂pwm信号sn1进行与运算,产生下桥臂开关的pwm信号sn;
80、基于上桥臂开关的pwm信号sp以及下桥臂开关的pwm信号sn分别控制上桥臂开关和下桥臂开关。
81、第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时,实现第一方面所述的碳化硅功率模组的多级主动热管理方法的步骤。
82、本发明的有益技术效果是:
83、(1)本发明充分利用了模组本身的可控性,无需系统控制器干预实现多级主动的热管理,减少了系统控制的复杂度。
84、(2)本发明可在模组层面主动自适应调节载波频率和桥臂占空比,无需完全依赖散热风扇,从而散热风扇只需按额定工况设计,减少了散热风扇的损耗和成本。
85、(3)在模组允许的载波频率波动范围内,模组无需降额,提升了模组的宽工况运行能力。
86、(4)当器件结温过高需要降额运行时,模组可以实现精确自适应降额,无需留有过多裕度,从而使得模组在宽温度运行工况下最小化出力损失。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175859.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。