一种轨道巡检机器人接触式充电装置的制作方法
- 国知局
- 2024-07-31 17:46:16
本技术属于控制主板,特别涉及一种轨道巡检机器人接触式充电装置。
背景技术:
1、轨道巡检机器人接触式充电技术是一种使机器人能够在运行时与充电设备接触并获得能量的技术。这种技术通常适用于需要长时间运行的机器人,如巡检机器人,轨道巡检机器人接触式充电控制主板是指用于控制机器人接触式充电过程中的电流、电压、充电时间等参数的电路板。
2、现有轨道巡检机器人接触式充电技术存在以下缺陷:
3、1、电池充电接口带电暴露在机器人外部,机器人运行过程中有短路风险,充电过程中产生火花;2、需要通过额外的传感器辅助充电定位,成本高、系统复杂;3、无法读取机器人充电电压、电流、温度、充电开关状态,因此,我们希望设计一种具有新型结构的接触式充电控制主板结构,从而解决这个问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种轨道巡检机器人接触式充电装置,解决上述背景技术中提出的问题。
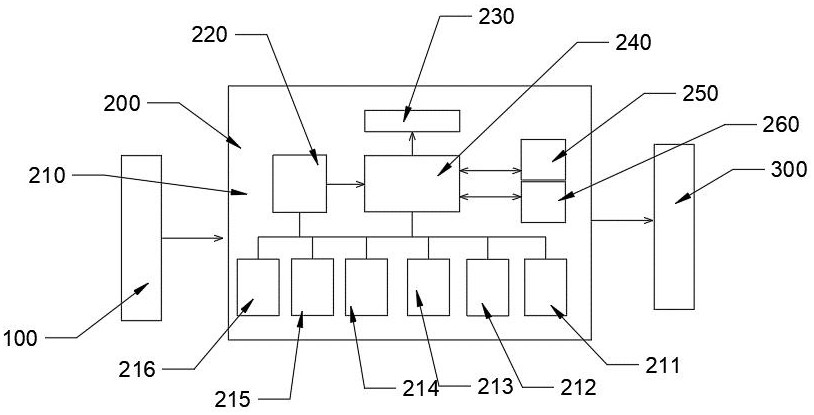
2、本实用新型通过以下的技术方案实现:一种轨道巡检机器人接触式充电装置,包括:电路主板,所述电路主板通过接触电极与充电器电性连接,所述电路主板与电池通过导线电性连接,所述电路主板与电池均安装在轨道机器人内部,所述电路主板包括电路板本体、电源转换电路、mcu控制电路;
3、所述电路主板上表面设置有电源转换电路,所述电路主板上表面焊接有单片机,所述单片机与mcu控制电路电性连接,所述电路主板上表面设置有mcu控制电路,所述电源转换电路与mcu控制电路电性连接,所述电路主板上表面焊接有指示灯,所述mcu控制电路与指示灯电性连接;
4、所述电路主板上表面设置有can总线通讯电路和485总线通讯电路,所述mcu控制电路分别与can总线通讯电路、485总线通讯电路双向连接。
5、作为一优选的实施方式,所述电路板本体上表面侧焊接有充电接口,所述充电接口与mcu控制电路电性连接,所述电路板上表面设置有充电电压采样电路,所述充电电压采样电路与mcu控制电路电性连接,增加充电电流采样电路、充电电压采样电路、温度采样电路,便于获取轨道机器人充电过程中的状态信息,通过采样电压、电流来判断轨道机器人是否和接触式充电桩充分接触,进行准确充电定位。
6、作为一优选的实施方式,所述电路板本体上表面设置有充电电流采样电路,所述充电电流采样电路与mcu控制电路电性连接。
7、作为一优选的实施方式,所述电路板本体上表面设置有电源转换电路,所述电源转换电路与mcu控制电路电性连接,在实际使用中,电源转换电路为电路主板上所有电气件供电,单片机采用stm32f103c8t6芯片,使用外部8m晶振提高单片机运行稳定性;
8、can总线通讯电路使用两通道隔离器和防静电二极管,保证can总线通讯电路安全稳定运行;485总线通讯电路中增加防静电二极管,保证485总线通讯电路安全稳定运行;
9、led的指示灯显示电路主板的运行状态及充电状态,充电时指示灯常亮,断开充电时指示灯常灭;使用电阻分压的方法将高电压29v转换为单片机可测量的3.3v以内,并增加稳压管,防止高电压损坏单片机。充电控制电路中串入采样电阻,通过运放将电阻两端的电压放大到单片机可测量范围内,并在单片机采样口增加稳压管,防止高电压损坏单片机;采样电阻在充电过程中发热最为严重,在其附近放置温敏电阻,使用单片机测量温敏电阻阻值并计算得到温度值。
10、作为一优选的实施方式,所述电路板本体上表面设置有电池接口,所述电池接口与mcu控制电路电性连接,在实际使用中,充电控制电路中使用继电器将电池充电线和轨道机器人外部接触电极完全隔离,继电器吸合机器人外部电极和电池充电接口断开,继电器断开轨道机器人外部电极和充电接口的连接。
11、采用了上述技术方案后,本实用新型的有益效果是:增加充电电流采样电路、充电电压采样电路、采样电压、电流来判断轨道机器人是否和接触式充电桩充分接触,进行准确充电定位,充电系统简单,无需额外的辅助充电定位传感器,充电过程智能监控,通过充电电流采样电路、充电电压采样电路、温度采样电路实时监控充电电压、电流、温度;
12、使用继电器控制接触式充电的轨道巡检机器人充电,在非充电状态下不带电,电极充分接触后再通电,避免产生火花,充电安全可靠,充电过程中不产生电火花;通过增加can总线通讯电路、485总线通讯电路,满足各种通讯需求,提升控制板的通讯接口多样性,提升系统容错率。
技术特征:1.一种轨道巡检机器人接触式充电装置,包括:电路主板(200),所述电路主板(200)通过接触电极与充电器(100)电性连接,所述电路主板(200)与电池(300)通过导线电性连接,所述电路主板(200)与电池(300)均安装在轨道机器人内部,其特征在于,所述电路主板(200)包括电路板本体(210)、电源转换电路(220)、mcu控制电路(240);
2.如权利要求1所述的一种轨道巡检机器人接触式充电装置,其特征在于:所述电路板本体(210)上表面侧焊接有充电接口(216),所述充电接口(216)与mcu控制电路(240)电性连接,所述电路板上表面设置有充电电压采样电路(215),所述充电电压采样电路(215)与mcu控制电路(240)电性连接。
3.如权利要求1所述的一种轨道巡检机器人接触式充电装置,其特征在于:所述电路板本体(210)上表面设置有充电电流采样电路(214),所述充电电流采样电路(214)与mcu控制电路(240)电性连接。
4.如权利要求1所述的一种轨道巡检机器人接触式充电装置,其特征在于:所述电路板本体(210)上表面设置有电源转换电路(220),所述电源转换电路(220)与mcu控制电路(240)电性连接。
5.如权利要求1所述的一种轨道巡检机器人接触式充电装置,其特征在于:所述电路板本体(210)上表面设置有电池接口(211),所述电池接口(211)与mcu控制电路(240)电性连接。
技术总结本技术提供一种轨道巡检机器人接触式充电装置,包括:电路主板,所述电路主板通过接触电极与充电器电性连接,所述电路主板与电池通过导线电性连接,所述电路主板与电池均安装在轨道机器人内部,与现有技术相比,本技术具有如下的有益效果:通过充电电流采样电路、充电电压采样电路、温度采样电路实时监控充电电压、电流、温度,使用继电器控制接触式充电的轨道巡检机器人充电,在非充电状态下不带电,电极充分接触后再通电,避免产生火花,充电安全可靠,充电过程中不产生电火花,通过增加CAN总线通讯电路、485总线通讯电路,满足各种通讯需求,提升控制板的通讯接口多样性,提升系统容错率。技术研发人员:时国柱,徐晨鑫,雷凌,张志坚受保护的技术使用者:南京北新智能科技有限公司技术研发日:20231207技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/176544.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表