一种永磁同步电驱系统相电流重构分时采样误差校正方法
- 国知局
- 2024-07-31 18:02:14
本发明属于电驱系统,涉及一种永磁同步电驱系统相电流重构分时采样误差校正方法。
背景技术:
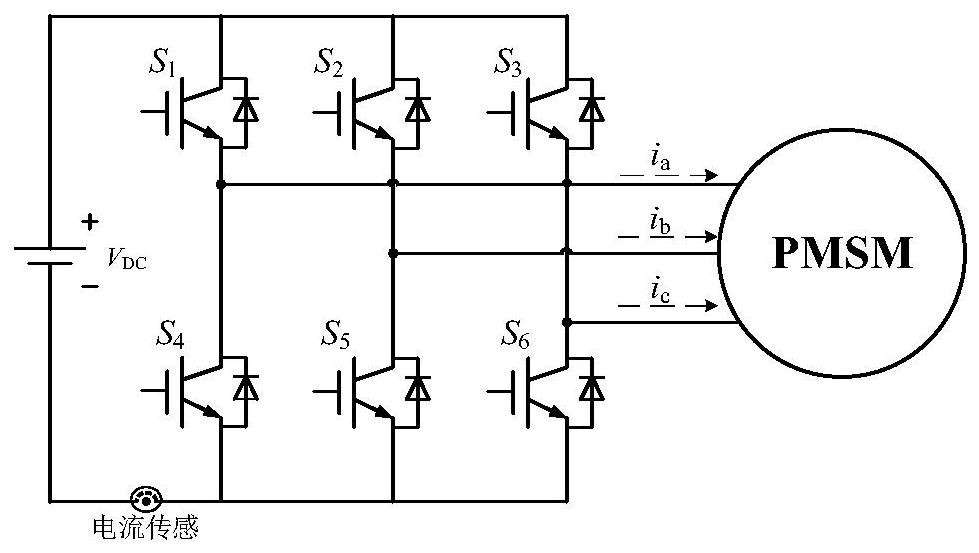
1、准确的电流信息对永磁同步电机驱动系统至关重要。对于传统的电机控制技术,通常采用两个或多个电流传感器来获得多相电流。为了降低成本或提高可靠性,近年来,许多学者对仅使用一个电流传感器的单电流传感器(single current sensor,scs)方法(也称为相电流重构方法)进行了广泛的研究。通常,根据传感器的安装位置,scs方法大致可分为三类:直流链路、多支路和单支路scs方法。在这些方法中,基于scs输出和相电流之间的关系,通过在每个开关间隔的不同电压矢量下的多次采样来重构三相电流。然而,当采用scs方法时,不可避免地会引入额外的电流误差,当前scs驱动器中主要的采样误差主要为分时采样误差和瞬时采样电流与pwm周期平均电流的误差。由于整个控制系统中只包括一个电流传感器,只能按顺序获得不同的相电流,因此相邻样本之间的异步性会导致分时采样误差。同时,由于采样时刻位于有效电压矢量作用时间内,采样获得的电流偏离在pwm中间采样获得的平均电流。上述前两种误差均会带来额外的谐波,导致转速转矩脉动,降低系统的控制性能。
2、目前常用的重构误差校正方法主要有电流观测器法、基于abc轴电机模型的三相电流预测法、基于αβ轴电机模型的补偿方法、基于简化数学模型的电流估计法等。以上方法依赖电机数学参数,且控制算法复杂,适用性较差。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种永磁同步电驱系统相电流重构分时采样误差校正方法,旨在解决相电流重构技术存在的电流采样误差问题,本发明所提出方法不过度依赖电机数学模型,控制程序易实现,适用性强。
2、为达到上述目的,本发明提供如下技术方案:
3、一种永磁同步电驱系统相电流重构分时采样误差校正方法,包括以下步骤:
4、s1:建立各个电压矢量作用时的戴维南等效电路,计算各个电压矢量作用时的电流纹波斜率;
5、s2:根据pwm的三相占空比判断参考电压矢量所处扇区;
6、s3:根据三相占空比计算各电压矢量作用时间;
7、s4:根据计算的各电压矢量电流斜率和作用时间,计算pwm末的电流值。
8、进一步,所述电压矢量包括u0(000)、u1(001)、u2(010)、u3(011)、u4(100)、u5(101)、u6(110)、u7(111),各个电压矢量作用时的电流纹波斜率依次为:
9、
10、
11、
12、
13、
14、
15、
16、其中,va、vb、vc为三相反电动势,由直流母线电压vdc和三相占空比da、db、dc决定,l为电机相电感,u7(111)的电流纹波斜率与u0(000)的电流纹波斜率相同,且两者均为零电压矢量,不参与参考电压矢量的合成。
17、进一步,步骤s2中,首先将空间电压矢量六边形依据pwm三相占空比划分为6个扇区,具体如下:
18、第一扇区由有效电压矢量u4(100)、u6(110)构成,第二扇区由有效电压矢量u2(010)、u6(110)构成,第三扇区由有效电压矢量u2(010)、u3(011)构成,第四扇区由有效电压矢量u3(011)、u1(001)构成,第五扇区由有效电压矢量u1(001)、u5(101)构成,第六扇区由有效电压矢量u4(100)、u5(101)构成。
19、然后,根据pwm的三相占空比da、db、dc,判断参考电压矢量所处扇区,具体如下:
20、当da>db>dc时,参考电压矢量处于第一扇区;当db>da>dc时,参考电压矢量处于第二扇区;当db>dc>da时,参考电压矢量处于第三扇区;当dc>db>da时,参考电压矢量处于第四扇区;当dc>da>db时,参考电压矢量处于第五扇区;当da>dc>db时,参考电压矢量处于第六扇区。
21、进一步,步骤s3中,电压矢量u0(000)、u1(001)、u2(010)、u3(011)、u4(100)、u5(101)、u6(110)、u7(111)的作用时间分别表示为t0、t1、t2、t3、t4、t5、t6、t7,其结果如下:
22、第一扇区:
23、第二扇区:
24、第三扇区:
25、第四扇区:
26、第五扇区:
27、第六扇区:
28、进一步,所述步骤s4具体包括以下步骤:
29、s41:计算a相补偿电流为:
30、
31、其中ia_comp为补偿后的电流,ia_samp为采样电流,t000、t100、t111分别为电压矢量u0(000)、u4(100)、u7(111)的作用时间,s000、s100、s111分别为电压矢量u0(000)、u4(100)、u7(111)作用时的电流纹波斜率。
32、s42:计算c相补偿电流为:
33、
34、s43:获得a相和c相补偿电流后,根据基尔霍夫电流定律获得第三相电流:
35、ia_comp+ib_comp+ic_comp=0
36、本发明的有益效果在于:
37、(1)本发明提出的永磁同步电驱系统采样误差补偿法,将dsp的采样更新延迟缩短为0.5个pwm周期,消除了相电流重构的分时采样误差与偏离平均电流的误差。
38、(2)补偿后,重构电流与实际电流相合性更好,重构误差峰值减少了50%,重构误差跳变明显减少。
39、(3)相比现有相电流采样误差方法,本方法适用于基于各种pwm变形的相电流重构算法,控制程序易实现。
40、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:1.一种永磁同步电驱系统相电流重构分时采样误差校正方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的永磁同步电驱系统相电流重构分时采样误差校正方法,其特征在于:所述电压矢量包括u0(000)、u1(001)、u2(010)、u3(011)、u4(100)、u5(101)、u6(110)、u7(111),各个电压矢量作用时的电流纹波斜率依次为:
3.根据权利要求1所述的永磁同步电驱系统相电流重构分时采样误差校正方法,其特征在于:步骤s2中,首先将空间电压矢量六边形依据pwm三相占空比划分为6个扇区,具体如下:第一扇区由有效电压矢量u4(100)、u6(110)构成,第二扇区由有效电压矢量u2(010)、u6(110)构成,第三扇区由有效电压矢量u2(010)、u3(011)构成,第四扇区由有效电压矢量u3(011)、u1(001)构成,第五扇区由有效电压矢量u1(001)、u5(101)构成,第六扇区由有效电压矢量u4(100)、u5(101)构成;
4.根据权利要求1所述的永磁同步电驱系统相电流重构分时采样误差校正方法,其特征在于:步骤s3中,电压矢量u0(000)、u1(001)、u2(010)、u3(011)、u4(100)、u5(101)、u6(110)、u7(111)的作用时间分别表示为t0、t1、t2、t3、t4、t5、t6、t7,其结果如下:
5.根据权利要求1所述的永磁同步电驱系统相电流重构分时采样误差校正方法,其特征在于:所述步骤s4具体包括以下步骤:
技术总结本发明涉及一种永磁同步电驱系统相电流重构分时采样误差校正方法,属于电驱系统技术领域,包括以下步骤:S1:建立各个电压矢量作用时的戴维南等效电路,计算各个电压矢量作用时的电流纹波斜率;S2:根据PWM的三相占空比判断参考电压矢量所处扇区;S3:根据三相占空比计算各电压矢量作用时间;S4:根据计算的各电压矢量电流斜率和作用时间,计算PWM末的电流值。本发明消除了相电流重构的分时采样误差与偏离平均电流的误差,补偿后,重构电流与实际电流相合性更好;本方法适用于基于各种PWM变形的相电流重构算法。技术研发人员:向学位,李辉,陈思宇,姚然受保护的技术使用者:重庆大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/177688.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。