一种考虑交叉口整体风险水平的车辆协同控制方法
- 国知局
- 2024-07-31 20:21:02
本发明涉及智能驾驶、车辆运动协同控制领域,具体涉及一种考虑交叉口整体风险水平的车辆协同控制方法
背景技术:
1、近年来随着汽车保有量的增加,导致交通事故的发生更加的频繁,给人民的生命财产安全带来了严重的损失。而交叉口作为城市路网的重要节点,存在着大量的车辆冲突行为,交通事故频发。因此,如何建立交叉口的风险评估指标,实现对车辆的安全控制,是降低道路事故发生率,提高道路安全水平的重中之重。
2、目前,国内学者针对交叉口安全评价和车辆运动控制开展了大量的工作。在交叉口安全评价方面,美国国家公路与运输协会出版的《道路安全手册,hsm》详细给出了平面交叉口安全性能函数spf(safety performance function)和基于事故预测模型的平面交叉口事故修正系数cmf(crash modification factors),指出了交叉口类型、交通控制措施、接入管理措施和多种交叉口设计参数的事故修正系数。此外学者们还提出了多种交通冲突指标来量化道路上的风险水平,如距离碰撞时间(ttc)、距离事故时间(ta)、后侵入时间(pet)等。在车辆协同控制方面,俄文娟以无信号交叉口为研究对象,基于车路协同思想,提出了冲突检测方法与消解策略,使车车冲突在向事故转变之前实现消解,消除因冲突造成的交通事故,但只研究了不同车道头车之间的冲突关系以及消解策略,与现实中的交通状况有一定的偏差;lee等将车辆的协调问题转化为以各车加速度为变量的非线性受限制优化问题,冲突方向上的车辆不会同时出现在交叉口的冲突区域,所以只须对车辆加速度进行精确控制即可。马芳武等人为改善车辆编队行驶的稳定性、安全性和舒适性,基于车车通信构建了多车协同编队控制系统。综上所述,目前的学者在对交叉口车辆进行协同控制时虽然考虑了安全的因素,但是往往只是以减少车车之间的冲突作为目标,没有从降低交叉口整体风险水平的角度对车辆进行控制。
3、因此,针对现有交叉口车辆协同控制算法的不足,本文对交叉口进行离散化,基于风险场理论建立了交叉口整体风险水平评估指标,基于交叉口进口道和出口道的位置关系,生成车辆在交叉口的通行路径,并以降低交叉口整体风险水平,提高车辆通行效率为目标,建立了车辆运动控制模型,输出车辆的加速度,实现对交叉口车辆的协同控制。
技术实现思路
1、针对现有车辆协同控制方法存在的不足,本文发明旨在提供一种能够降低交叉口整体风险水平的车辆协同控制方法,该方法具体包括如下步骤:
2、步骤1,基于激光雷达、毫米波雷达、gps、组合惯导和网联设备获取交叉口内部所有车辆的运动状态数据;
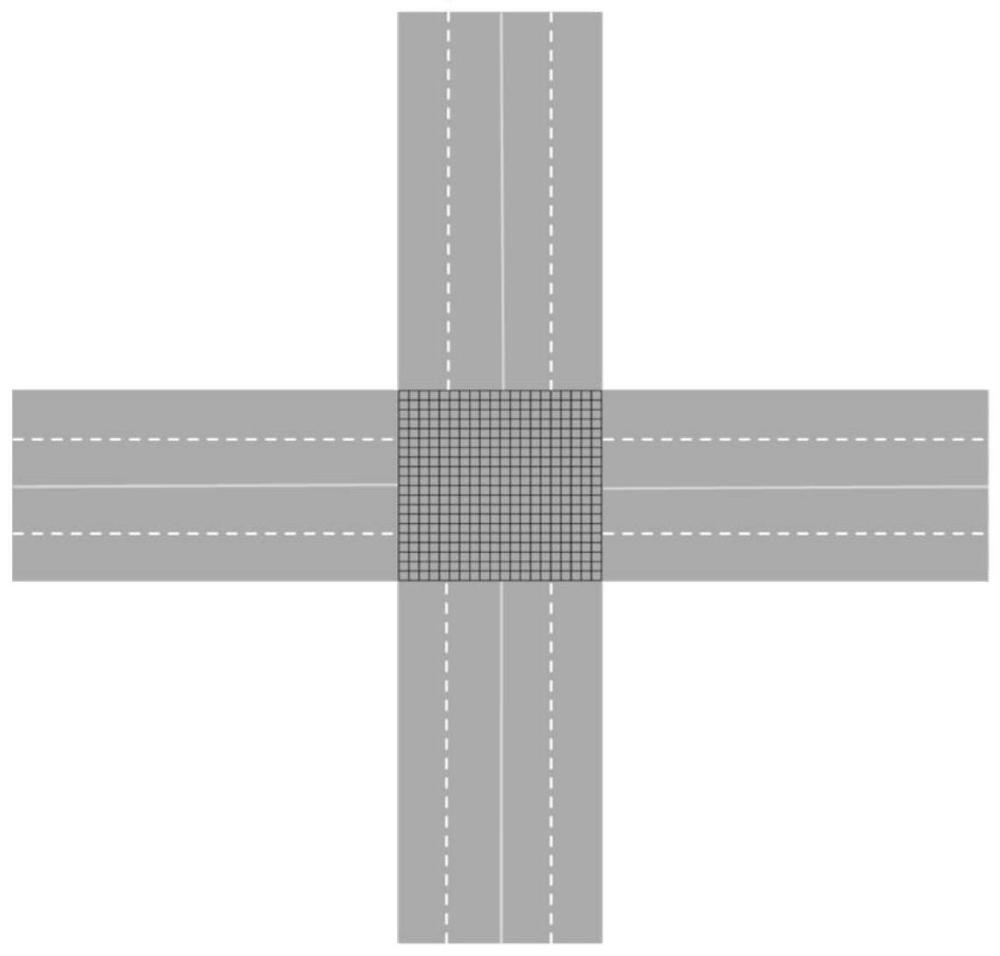
3、步骤2,以网格的形式对交叉口进行离散化,分别计算交叉口内部各个车辆对每一个网格中心点造成的风险,按取最大值的方式进行叠加;
4、步骤3,基于所有网格中心点的风险,建立交叉口整体风险水平评估指标;
5、步骤4,基于交叉口进口道和出口道的位置关系,建立车辆在交叉口的通行路径;
6、步骤5,基于步骤3建立的交叉口整体风险水平评估指标和车辆运动约束,建立以交叉口整体风险水平最低为目标的车辆运动控制模型。
7、进一步地,步骤2所述的以网格的形式对交叉口进行离散化,分别计算交叉口内部各个车辆对每一个网格中心点造成的风险,按取最大值进行叠加,包括如下步骤:
8、步骤21,获取离散后交叉口中所有的网格中心点在世界坐标系下的坐标,表示为(xi,yi);
9、步骤22,分别以交叉口内每辆车的车头方向为x轴,横向为y轴,车辆中心为原点建立坐标系,基于坐标转化公式将网格中心点的世界坐标分别转化到车辆坐标系下,坐标转化公式如下:
10、
11、步骤23,计算交叉口内所有车辆对各网格中心点造成的风险,具体的风险计算公式如下:
12、机动车辆对应的纵向风险函数为:
13、
14、
15、机动车辆对应的横向风险函数为:
16、
17、
18、机动车辆对应的风险函数为:
19、
20、
21、其中,αk,x,βk,x,αk,y和βk,y分别决定了第k辆机动车周围风险值随距离和速度变化的影响程度,这四个因素主要和机动车辆的类型有关系,例如与小客车相比,在相同速度下,会与大货车保持更大的相对距离。vk,x(t)和vk,y(t)分别为第k辆机动车辆t时刻的纵向速度和侧向速度,lk和wk分别为第k辆机动车辆的车长和车宽,δx,k(x,y,t)为机动车的纵向风险衰减系数,δy,k(x,y,t)为机动车的横向风险衰减系数,δk(x,y,t)为机动车的风险衰减系数。
22、步骤24,针对每个网格点,按取最大值的方式叠加所有车辆对该网格点产生的风险。
23、进一步地,步骤3所述的基于所有网格中心点的风险,建立交叉口整体风险水平评估指标,其交叉口整体风险水平评估指标可通过如下表达式描述:
24、
25、其中,n1为交叉口离散后网格的数量,ri为第i个网格点的风险值,w0,w1决定了风险值的大小对安全水平的影响程度,risk为交叉口整体风险水平评估指标。
26、进一步地,步骤4所述的基于交叉口进口道和出口道的位置关系,建立车辆在交叉口的通行路径,包括如下步骤:
27、步骤41,以交叉口的进口道为基准,交叉口进口道停车线的中点为坐标系的原点,停车线所在直线为坐标系x轴,停车线中垂线为坐标系y轴,建立坐标系;
28、步骤42,建立基于三阶贝塞尔曲线的车辆通行路径,该曲线由控制点po、pd、p1和p2控制,其中,po表示车辆路径起点,坐标为(0,0);pd表示车辆路径终点,坐标为(w,h);p1控制车辆进入交叉口后路径的形状,位于交叉口进口道中心的延长线上,坐标为(0,l1);p2控制车辆即将驶离交叉口路径的形状,位于交叉口出口道中心的延长线上,坐标为(w-l2sinα,h-l2cosα);l1表示控制点po与p1之间的距离,l2表示控制点pd与p2之间的距离;对应每一组交叉口进口道和出口道,通过车辆实际轨迹数据,可获得一组车辆路径的最优控制参数l1和l2。其中,w和h分别表示进口道出口处的中点和出口道入口处的中点之间的横向和纵向距离,α表示进口道和出口道所在直线夹角的补角,即出口道所在直线与y轴的夹角。
29、进一步地,步骤5所述的基于交叉口整体风险水平评估指标和车辆运动约束,以交叉口整体风险水平最低为目标的车辆运动控制模型,可通过如下表达式描述:
30、
31、
32、i=1,2…n1,j=1,2…n2,k=1,2…np
33、其中,ri为第i个网格点的风险值,aj为第j辆车在某一时刻的加速度,vj为第j辆车在某一时刻的速度,xj为第j辆车在某一时刻的位置,n1为交叉口离散后网格的数量,n2为交叉口内部的车辆数,np为预测的步数,δt为预测的步长,aj,min为加速度值的下界,aj,max为加速度值的上界,ades为各车的期望加速度输入。
本文地址:https://www.jishuxx.com/zhuanli/20240731/185965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表