遥控方法、装置、设备和存储介质与流程
- 国知局
- 2024-07-31 20:21:26
本发明属于机器人领域,尤其涉及一种机器人的遥控方法、装置、设备和存储介质。
背景技术:
1、由于蓝牙模块、wifi模块等硬件模块的遥控方式在距离和空间上都存在不足,并且相应的模块会增加额外成本。申请人当前采用的方法,是由客户端通过云平台下发遥控指令到机器人,实现哪里有网络,哪里就可以远程遥控。申请人发现机器人收到的云平台转发的遥控指令存在倒叙情况,即客户端先发送指令1再发送指令2,但机器人确是在收到指令2后才收到指令1,造成机器人一小段时间内失控的风险,出现遥控结束,机器人停止运动后,突然又自动向前跑一段,使得机器人的运行与遥控人员的意志不一致。
技术实现思路
1、针对现有技术中的上述不足或缺陷,本发明提供一种降低指令倒叙影响的遥控方法、装置、电子设备和存储介质。
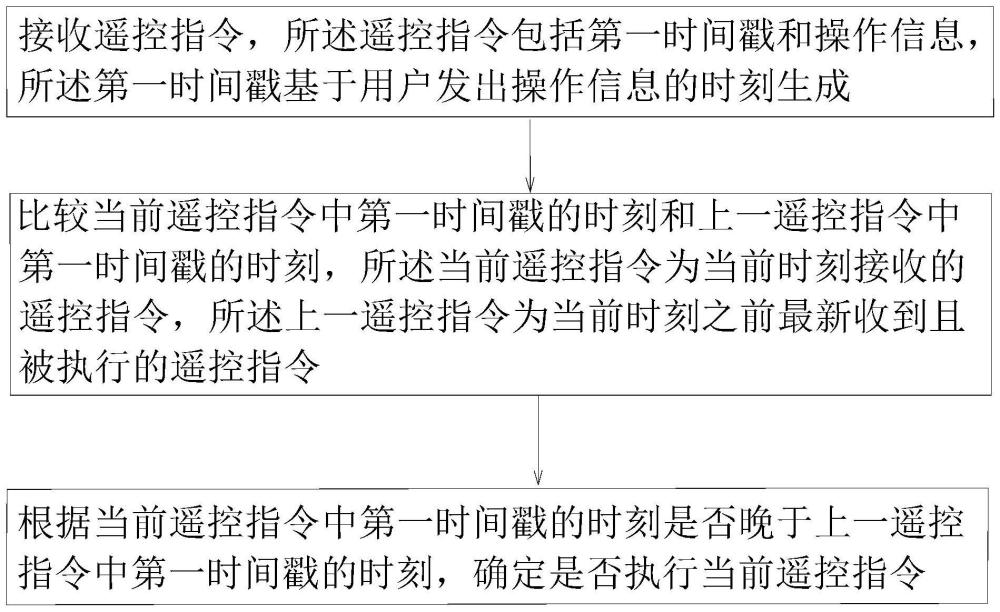
2、本发明提供的基于设备端的遥控方法,包括如下步骤:接收遥控指令,所述遥控指令包括第一时间戳和操作信息,所述第一时间戳基于用户发出操作信息的时刻生成;比较当前遥控指令中第一时间戳的时刻和上一遥控指令中第一时间戳的时刻,所述当前遥控指令为当前时刻接收的遥控指令,所述上一遥控指令为当前时刻之前最新收到且被执行的遥控指令;根据当前遥控指令中第一时间戳的时刻是否晚于上一遥控指令中第一时间戳的时刻,确定是否执行当前遥控指令。
3、本发明提供的技术方案,通过在遥控指令中添加基于遥控指令中操作信息的发出时刻生成的第一时间戳,并比对当前遥控指令中第一时间戳的时刻是否晚于上一遥控指令中第一时间戳的时刻,来确定是否执行当前遥控指令,这样就能通过不执行倒叙遥控指令,降低执行倒叙遥控指令产生的风险。
4、可选的,基于设备端的遥控方法还包括如下步骤:接收所述遥控指令的时刻生成第二时间戳;比较所述第一时间戳的时刻和所述第二时间戳的时刻;在所述第一时间戳的时刻早于第二时间戳的时刻超过预设时间时,忽略所述遥控指令,所述预设时间根据设备端的作业参数和作业环境确定。
5、本发明还提供一种用于云平台的遥控方法,包括如下步骤:接收用户发出的遥控指令,所述遥控指令包括操作信息和第一时间戳,所述第一时间戳基于所述操作信息的发出时刻生成;比较当前遥控指令中第一时间戳的时刻和前一遥控指令中第一时间戳的时刻,所述当前遥控指令为当前时刻接收用户发出的遥控指令,所述前一遥控指令为当前时刻之前最新收到且成功发送给设备端的遥控指令;根据所述当前遥控指令中第一时间戳的时刻是否晚于所述前一遥控指令中第一时间戳的时刻,确定是否向设备端发送当前遥控指令。
6、本发明在云平台向设备端发送遥控指令之前,通过比对当前遥控指令中第一时间戳的时刻是否晚于前一遥控指令中第一时间戳的时刻,确定是否向设备端发送当前遥控指令,从而在云平台这一侧就能筛选出倒叙遥控指令,避免将倒叙遥控指令发送给设备端,导致设备端因为执行倒叙指令产生风险。
7、本发明还提供一种基于智能终端的遥控方法,包括如下步骤:接收用户的操作信息和操作时间;根据用户的操作信息和操作时间生成包括第一时间戳和操作信息的遥控指令,所述第一时间戳基于用户的操作信息发出的时刻生成;发送所述遥控指令。
8、基于智能终端的遥控方法,还包括如下步骤:当操作信息为停止时,发送包括停止操作信息的遥控指令;当操作信息为位姿调节时,发送包括位姿调节操作信息的遥控指令,并在收到包含停止操作信息的遥控指令之前每间隔预设时间发送包括位姿调节的遥控指令,所述位姿调节包括前进、后退、左转和右转。
9、基于智能终端的遥控方法,还包括如下步骤:获取智能终端和设备端之间近场通信的信号强度;根据近场通信的信号强度是否大于预设信号值,确定是直接向设备端发送遥控指令,还是通过云平台向设备端发送遥控指令。
10、本发明通过在智能终端发送的遥控指令中,加上基于操作信息发送时刻生成的第一时间戳,为设备端和/或云平台端基于第一时间戳筛选出倒叙指令提供基础。
11、本发明还提供一种用于设备端遥控装置,包括第一接收模块,接收遥控指令,所述遥控指令包括第一时间戳和操作信息,所述第一时间戳基于用户发出操作信息的时刻生成;第一比较模块,比较当前遥控指令中第一时间戳的时刻和上一遥控指令中第一时间戳的时刻,所述当前遥控指令为当前时刻接收的遥控指令,所述上一遥控当前时刻之前最新收到且被执行的遥控指令;以及执行模块,根据当前遥控指令中第一时间戳的时刻是否晚于上一遥控指令中第一时间戳的时刻,确定是否执行当前遥控指令。
12、本发明还提高一种用于云平台遥控装置,包括第二接收模块,接收用户发出的遥控指令,所述遥控指令包括操作信息和第一时间戳,所述第一时间戳基于所述操作信息的发出时刻生成;第二比较模块,比较当前遥控指令中第一时间戳的时刻和前一遥控指令中第一时间戳的时刻,所述当前遥控指令为当前时刻接收用户发出的遥控指令,所述前一遥控指令为当前时刻之前最新收到且成功发送给设备端的遥控指令;以及第一发送模块,根据所述当前遥控指令中第一时间戳的时刻是否晚于所述前一遥控指令中第一时间戳的时刻,确定是否向设备端发送当前遥控指令。
13、本发明还提供一种基于智能终端的遥控装置,包括第三接收模块,接收用户的操作信息和操作时间;指令生成模块,根据用户的操作信息和操作时间生成包括第一时间戳和操作信息遥控指令,所述第一时间戳基于用户的操作信息发出的时刻生成;以及第二发送模块,发送所述遥控指令。
14、本发明还提供一种电子设备,包括:处理器和存储器,所述存储器中存储指令,所述指令由所述处理器加载并执行,以实现如权利要求前述遥控方法。
15、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被执行时实现前述方法。
16、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:1.一种遥控方法,用于设备端,其特征在于,包括:
2.根据权利要求1的遥控方法,其特征在于,还包括如下步骤:
3.一种遥控方法,用于云平台,其特征在于,包括:
4.一种遥控方法,用于智能终端,其特征在于,包括:
5.根据权利要求1所述的遥控方法,其特征在于,包括:
6.根据权利要求5所述的遥控方法,其特征在于,包括:
7.一种遥控装置,用于设备端,其特征在于,包括:
8.一种遥控装置,用于云平台,其特征在于,包括:
9.一种遥控装置,用于智能终端,其特征在于,包括:
10.一种电子设备,其特征在于,包括:处理器和存储器,所述存储器中存储指令,所述指令由所述处理器加载并执行,以实现如权利要求1至6任一项所述的方法。
11.一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被执行时实现如权利要求1-6中任一项所述的方法。
技术总结本发明提供一种能降低指令倒叙影响的遥控方法,包括如下步骤:接收遥控指令,所述遥控指令包括第一时间戳和操作信息,所述第一时间戳基于用户发出操作信息的时刻生成;比较当前遥控指令中第一时间戳的时刻和上一遥控指令中第一时间戳的时刻,所述当前遥控指令为当前时刻接收的遥控指令,所述上一遥控指令为当前时刻之前最新收到且被执行的遥控指令;根据当前遥控指令中第一时间戳的时刻是否晚于上一遥控指令中第一时间戳的时刻,确定是否执行当前遥控指令。技术研发人员:王瑞,黎伟健受保护的技术使用者:广东美房智高机器人有限公司技术研发日:技术公布日:2024/5/10本文地址:https://www.jishuxx.com/zhuanli/20240731/185992.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。