交通事故感知减速方法及系统与流程
- 国知局
- 2024-07-31 20:21:47
本发明涉及交通设备,尤其涉及一种交通事故感知减速方法。另外,还涉及一种交通事故感知减速系统。
背景技术:
1、对前方车辆的交通事故的感知探测,目前所采用的主要方案是使用后方车辆车载前视摄像头对前方车辆运动状态进行感知计算,以判定前车是否发生交通事故。但是基于单一视觉感知系统对前方交通状态的感知的准确率较低,若遇到可视度情况不好的环境,那么容易造成的漏检误检概率较高,给行车安全带来了隐患。
2、有鉴于此,需要设计一种交通事故感知减速方法,以克服上述缺陷。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明提供一种交通事故感知减速方法,能够提高行车安全。
3、根据本发明第一方面提供的一种交通事故感知减速方法,包括以下步骤:
4、感知前车是否发生交通事故并获取前车的交通事故状态感知结果;
5、前车传输交通事故状态感知结果至路端计算模块;
6、路端计算模块获取路端感知结果,并融合前车传输的交通事故状态感知结果以形成路端融合结果;
7、将路端融合结果传输至后车,后车适于独立或结合感知前车状态、车道状态以及路端融合结果,以判定前车是否发生交通事故并即时减速。
8、本发明的有益效果是,通过前车直接获取自车的交通事故状态,然后将前车自车的交通事故状态传输至路端计算模块,同时路端计算模块自主获取前车的交通事故状态并将两者融合以提高所获取结果的准确,随后路端将路端融合结果传输至后车,后车对前车状态、车道状态以及路端融合结果进行综合计算,以能够更加准确的得到前车交通事故状态的感知结果,进而对车辆能够及时减速制动,保证车辆的行车安全。
9、优选地,所述前车的交通事故状态感知结果包括:
10、crash前车=1,前车判定自车发生碰撞交通事故;
11、crash前车=0,前车判定自车未发生碰撞交通事故。
12、进一步优选地,所述路端计算模块适于独立感知前车交通事故状态以形成路端感知结果,其中,
13、crash路端=1,路端计算模块判定前车发生碰撞交通事故;
14、crash路端=0,路端计算模块判定前车未发生碰撞交通事故。
15、优选地,所述路端计算模块适于结合所述前车交通事故状态与路端感知结果以形成路端融合结果为,其中,
16、crash路端融合=1,路端计算模块判定前车发生碰撞交通事故;
17、crash路端融合=0,路端计算模块判定前车未发生碰撞交通事故。
18、进一步优选地,所述路端计算模块适于根据前车是否发生碰撞交通事故控制车道状态,所述车道状态至少包括:
19、车道线被点亮为白色,前车未发生碰撞交通事故;
20、车道线被点亮为红色并闪烁,前车发生碰撞交通事故,且至少距离事故点60m内的车道线被点亮为红色并闪烁;以及
21、车道线被点亮为黄色,前车发生碰撞交通事故,且至少距离60-200m范围内的车道线被点亮为黄色。
22、优选地,所述后车适于实时感知所述前车状态,以获取前车交通事故状态的感知结果并即时减速制动,其中,
23、crash后车=1,后车判定前车发生碰撞交通事故;
24、crash后车=0,后车判定前车未发生碰撞交通事故。
25、进一步优选地,所述后车适于感知所述车道状态,以获取所述车道状态的感知结果并根据所述车道状态变化控制自车减速制动,其中,
26、crash车道线=1,后车判定前车发生碰撞交通事故,此时车道线被点亮为红色或黄色;
27、crash车道线=0,后车判定前车未发生碰撞交通事故,此时车道线未被点亮。
28、优选地,所述后车适于结合所述前车状态、所述车道状态以及所述路端融合结果以形成后车融合感知结果,其中,
29、crash后车融合感知结果=1时,后车进行减速处理或减速准备,且所述减速处理或所述减速准备为所述车道状态、所述前车状态以及所述路端融合结果中任意一项检测到发生交通事故时执行。
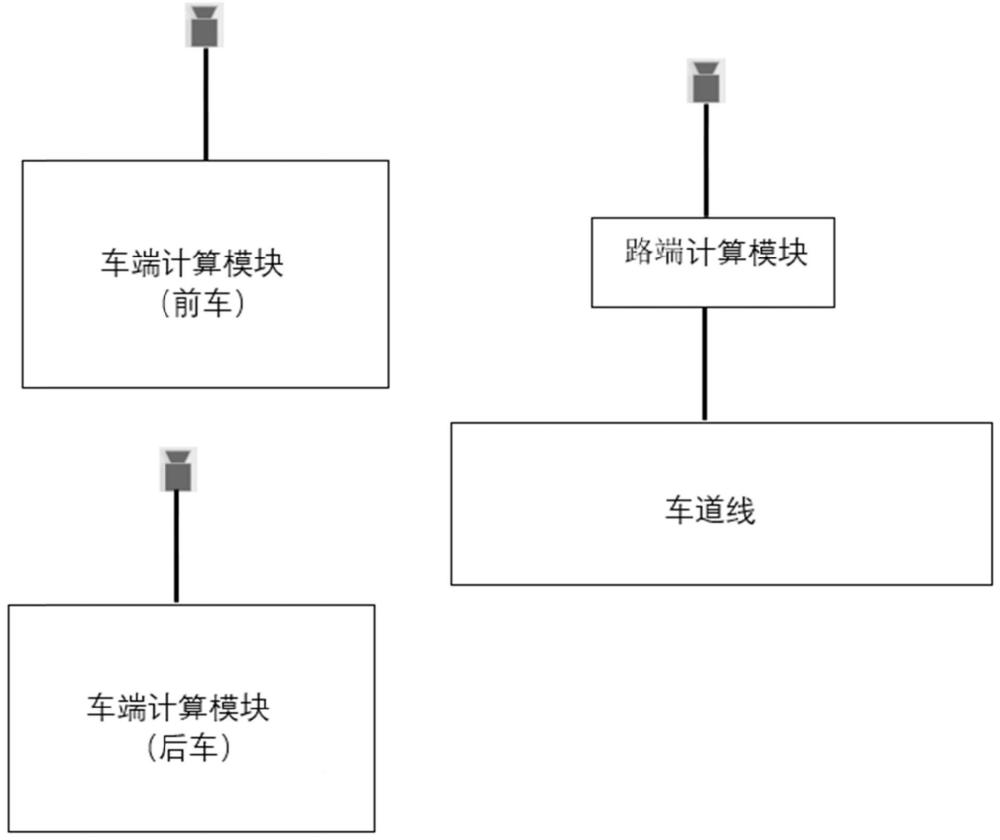
30、本发明第二方面提供了一种交通事故感知减速系统,包括车端计算模块、路端计算模块以及车道线组件,所述车端计算模块分别设置在行驶车辆上,且设置在前车上的即构成前车车端计算模块,设置在后车上的即构成后车车端计算模块,所述路端计算模块设置在车道侧边,所述路端计算模块包括路端监控摄像头,以能够经由所述路端监控摄像头感知前车状态,且所述路端计算模块与所述车端计算模块适于无线互联,所述车道线组件与所述路端计算模块电连接,以能够经由所述路端计算模块控制所述车道线组件的颜色变化。
31、优选地,所述车道线组件包括发光元件,以及覆盖于所述发光元件上并与车辆直接接触的高强玻璃,所述发光元件与所述路端计算模块经由线缆相连,以能够经由所述路端计算模块控制所述发光元件的亮灭。
32、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
33、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:1.一种交通事故感知减速方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的交通事故感知减速方法,其特征在于,所述前车的交通事故状态感知结果为,
3.根据权利要求2所述的交通事故感知减速方法,其特征在于,所述路端计算模块适于独立感知前车交通事故状态以形成路端感知结果,其中,
4.根据权利要求3所述的交通事故感知减速方法,其特征在于,所述路端计算模块适于结合所述前车交通事故状态与路端感知结果以形成路端融合结果为,其中,
5.根据权利要求3所述的交通事故感知减速方法,其特征在于,所述路端计算模块适于根据前车是否发生碰撞交通事故控制车道状态,所述车道状态至少包括:
6.根据权利要求5所述的交通事故感知减速方法,其特征在于,所述后车适于实时感知所述前车状态,以获取前车交通事故状态的感知结果并即时减速制动,其中,
7.根据权利要求6所述的交通事故感知减速方法,其特征在于,所述后车适于感知所述车道状态,以获取所述车道状态的感知结果并根据所述车道状态变化控制自车减速制动,其中,
8.根据权利要求7所述的交通事故感知减速方法,其特征在于,所述后车适于结合所述前车状态、所述车道状态以及所述路端融合结果以形成后车融合感知结果,其中,
9.一种交通事故感知减速系统,其特征在于,包括车端计算模块、路端计算模块以及车道线组件,所述车端计算模块分别设置在行驶车辆上,且设置在前车上的即构成前车车端计算模块,设置在后车上的即构成后车车端计算模块,所述路端计算模块设置在车道侧边,所述路端计算模块包括路端监控摄像头,以能够经由所述路端监控摄像头感知前车状态,且所述路端计算模块与所述车端计算模块适于无线互联,所述车道线组件与所述路端计算模块电连接,以能够经由所述路端计算模块控制所述车道线组件的颜色变化。
10.根据权利要求9所述的交通事故感知减速系统,其特征在于,所述车道线组件包括发光元件,以及覆盖于所述发光元件上并与车辆直接接触的高强玻璃,所述发光元件与所述路端计算模块经由线缆相连,以能够经由所述路端计算模块控制所述发光元件的亮灭。
技术总结本发明公开了一种交通事故感知减速方法及系统,包括以下步骤:感知前车是否发生交通事故并获取前车的交通事故状态感知结果;前车传输交通事故状态感知结果至路端计算模块;路端计算模块获取路端感知结果,并融合前车传输的交通事故状态感知结果以形成路端融合结果;将路端融合结果传输至后车,后车适于独立或结合感知前车状态、车道状态以及路端融合结果,以判定前车是否发生交通事故并即时减速。本发明通过前车直接获取自车的交通事故状态,同时路端计算模块获取前车的交通事故状态并将两者融合以提高所获取结果的准确,以能够更加准确的得到前车交通事故状态的感知结果,进而对车辆能够及时减速制动,保证车辆的行车安全。技术研发人员:张进权受保护的技术使用者:上海星宇智行技术有限公司技术研发日:技术公布日:2024/5/10本文地址:https://www.jishuxx.com/zhuanli/20240731/186021.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表