一种基于令牌的控制车辆不停车通过交叉口的系统及方法与流程
- 国知局
- 2024-07-31 20:21:40
本技术涉及道路交通运输管理与控制技术的领域,尤其是涉及一种基于令牌的控制车辆不停车通过交叉口的系统及方法。
背景技术:
1、大量事实表明,城市交叉口的拥挤现象最为严重,主要的延误集中在城市道路交叉口,平面交叉的通行能力不足道路的50%。一般而言,进入交叉口的车辆,由于受到信号灯的作用,往往要改变行车状态,完全停车和不完全停车都要造成车辆运行时间的损失。传统信号灯控制的交叉口存在诸多弊端,以致车辆在接近或者通过交叉口时极易造成道路拥堵,甚至会发生交通事故,导致资源浪费和经济损失。
2、相关技术中,公开了一种基于车辆速度诱导策略引导车辆不停车通过交叉口的装置,包括信号机控制单元及车载控制单元,所述信号机控制单元与车载控制单元通过无线通信;所述信号机控制单元包括信号控制机、信号机控制单元gps模块、微处理器控制单元mcu及信号机控制单元zigbee无线传输单元;所述信号控制机、信号机控制单元gps模块分别与微处理器控制单元mcu的输入端相连,用于接收交叉口处红绿灯的实时信号及交叉口处红绿灯的位置信号;所述微处理器控制单元mcu的输出端与信号机控制单元zigbee无线传输单元相连,通过信号机控制单元zigbee无线传输单元与车载控制单元进行数据通信;所述车载控制单元包括车载控制单元zigbee无线传输单元、车载控制单元gps模块、车载感知单元、车载微处理器控制单元mcu及车载智能终端;所述车载控制单元zigbee无线传输单元、车载控制单元gps模块及车载感知单元分别与车载微处理器控制单元mcu的输入端相连,用于通过车载控制单元zigbee无线传输单元与信号机控制单元进行数据通信、接收车辆的位置信号及车辆的运行状态信号,所述车载微处理器控制单元mcu的输出端与车载智能终端相连,用于显示车辆行驶的诱导信息。
3、通过上述相关技术,发明人发现通过实时分析交叉口路段的红绿灯信号配时、交叉口距本车的距离,虽然能够得到使车辆不停车通过交叉口的诱导速度范围,但是在实际操作过程中,由于驾驶员的个人习惯和经验,很容发生车辆不按照诱导速度行驶的情况,最终造成交叉路口的通行效率低,达不到有效地缓解交通压力的目的。
技术实现思路
1、本技术的目的是提供一种基于令牌的控制车辆不停车通过交叉口的系统及方法,能够精准控制车辆通过交叉口,而不需要车辆停车等待,提高车辆通过交叉路口的效率,缓解城市交通的压力,减少事故的发生。
2、本技术提供的一种基于令牌的控制车辆不停车通过交叉口的系统采用如下的技术方案:
3、一种基于令牌的控制车辆不停车通过交叉口的系统,包括:
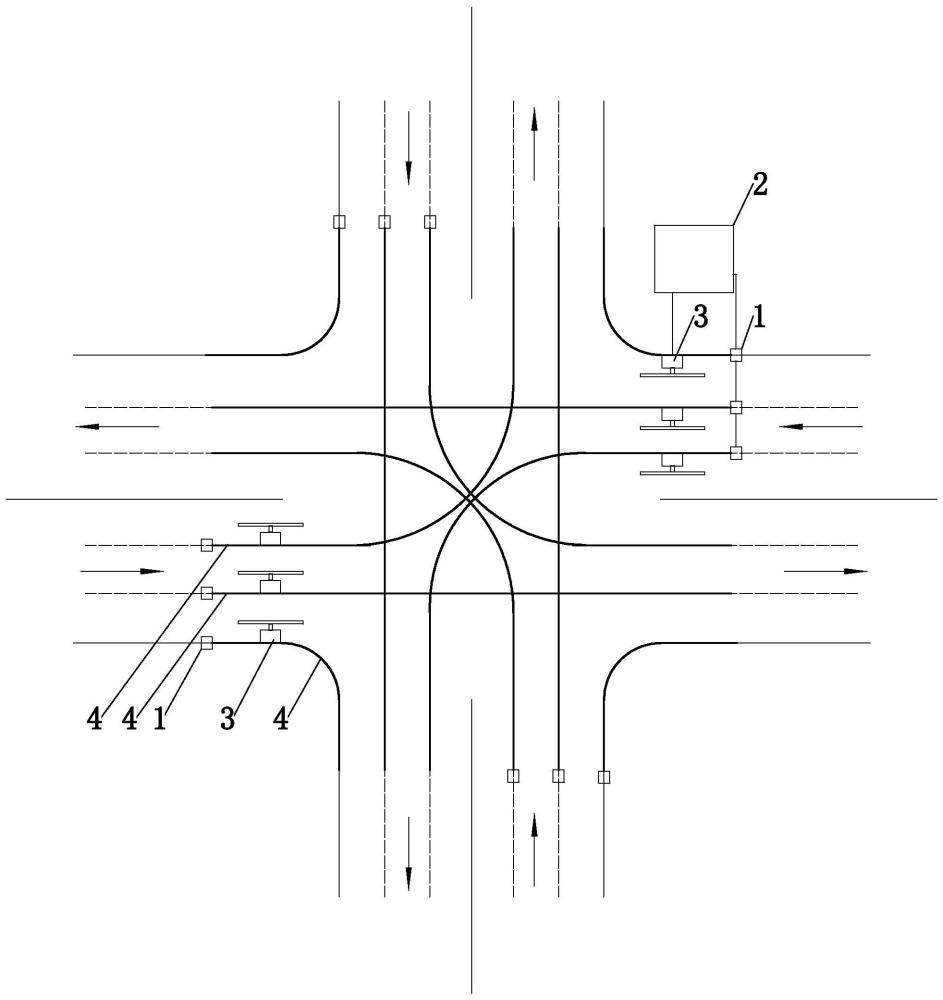
4、若干车辆感应装置,设置于交叉口的每侧路口,用于扫描路口来向车辆,并发出感应信号;
5、控制中心,与车辆感应装置电性连接,用于接收并处理感应信号,并对来向车辆进行标记,同时发出控制命令;
6、行车令牌,与控制中心电性连接,用于接收控制信号,并在控制信号的命令下随着被标记车辆同步移动;
7、环形轨道,设置于两个方向的路口之间,行车令牌循环设置在环形轨道上;
8、行车令牌对行驶的车辆进行限速,使车辆按照行车令牌的速度行驶,并在行车令牌的限制下进行直行、左转或右转。
9、作为本技术的一种优选技术方案,所述车辆感应装置设置为摄像头,设置于距离交叉口50-100m的位置处,对经过的车辆进行实时拍摄,并将拍摄的车辆信息传输给控制中心,控制中心根据车辆信息分派行车令牌给经过的车辆。
10、作为本技术的一种优选技术方案,所述行车令牌包括移动车体以及设置于移动车体上的速度控制装置,移动车体移动设置在环形轨道上,速度控制装置连接在移动车体上并位于行车道上方,用于对下方通过的车辆进行速度限制。
11、作为本技术的一种优选技术方案,所述移动车体包括滑移设置在环形轨道上的车架、驱动车架移动的动力机构以及设置于车架上的车载计算机,车载计算机与动力机构连接,并控制动力机构的工作,控制中心与车载计算机连通,车载计算机用于接收控制中心发出的控制命令,速度控制装置连接于车架上。
12、作为本技术的一种优选技术方案,所述速度控制装置包括连接于车架侧面的安装轴和连接于安装轴上的控制机构,控制机构分布于车辆的前后两端,限制车辆的行车速度。
13、作为本技术的一种优选技术方案,所述控制机构包括垂直于安装轴设置的连接杆、垂直设置于连接杆两端的限位板以及驱动两个限位板向相互远离方向转动的液压装置,连接杆设置于对应车辆的上方或侧方,两个限位板设置于对应车辆的前后两端,液压装置受车载计算机控制。
14、作为本技术的一种优选技术方案,两个所述限位板上均设置有防碰撞报警装置以及与防碰撞报警装置连接的声光报警装置。
15、作为本技术的一种优选技术方案,所述控制机构包括垂直于安装轴设置的连接杆以及设置于连接杆前端或者前后两端的红外报警装置。
16、作为本技术的一种优选技术方案,所述环形轨道设置在相邻的车道之间标线的上方,环形轨道所在平面或曲面垂直于水平面,行车令牌在环形轨道上上下升降和水平移动,环形轨道在交叉口的出口位置为上下升降部分。
17、本技术提供的一种基于令牌的控制车辆不停车通过交叉口的方法采用如下的技术方案:
18、一种基于令牌的控制车辆不停车通过交叉口的方法,包括以下步骤:
19、车辆感应装置扫描交叉口驶入的车辆,将车辆信息传递给控制中心,控制中心发出指令给行车令牌,行车令牌在环形轨道上开始移动;
20、行车令牌在车载计算机的控制下与驶入的车辆保持同步移动,控制机构展开分布在车辆的前后端,对车辆进行限速;
21、在控制中心的计算程序控制下,各个路口进入交叉口的行车令牌之间不会发生交叉、碰撞,使得车辆不停车通过交叉口;
22、行车令牌将车辆护送通过交叉口后,从环形轨道的上道回到出发点。
23、综上所述,本技术包括以下至少一种有益技术效果:
24、1.本技术中利用车辆感应装置交叉路口来向的车辆,并对每个车辆进行标记,然后由控制中心给标记的车辆分发行车令牌,行车令牌挡在车辆的前后侧,利用自身的行驶速度来限制车辆的行驶速度,使车辆在行车令牌要求的速度范围内行驶通过交叉路口,由于行车令牌收到控制中心的统一控制调派,能够做到交叉行驶的车辆之间不会发生接触,也就实现了车辆不停车通过交叉路口,提高了车辆在交叉路口通过的效率,能够有效地缓解城市的交通压力。
25、2.本技术的系统设置在道路上方,不会占用较大的道路空间,不会影响道路上正常的行车能够有效地利用道路上方的空间。
26、3.本技术的系统采用计算机控制行车令牌的行驶速度,控制更加精准,对车辆的行驶速度也控制得更加准确,能够确保车辆之间安全距离。
27、4.本技术中在控制机构的前后端均设置报警装置,一旦车辆的前端或者后端超出控制机构的范围,就会触发报警装置,提醒驾驶员按照行车令牌要求的速度行驶,进而保证了行车的安全。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186010.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表