一种对船舶轨迹进行智能监测的方法及系统
- 国知局
- 2024-07-31 20:21:35
本发明涉及船运监测技术,特别是一种对船舶轨迹进行智能监测的方法及系统。
背景技术:
1、随着科学技术及社会经济的快速发展,海上运量、运力上升极快,反过来推动了社会及技术的发展。但由于海洋环境容易受天气和气候的影响,存在诸多影响船舶航行的因素,因此,无论是出于安全的考虑还是管理以及发展的需求,都很有必要对船舶的轨迹进行监测。
2、目前常用的船舶轨迹监测方法为通过船舶上的雷达对船舶的位置进行数据采集,并对采集到的位置数据进行分析,从而实现对船舶轨迹的监测。然而,实践发现,当出现雨、雾、雪等不良天气、气候时,会严重影响雷达的传播准确性及速度,进而无法对船舶轨迹进行准确监测。因此,亟需一种能够提高船舶轨迹的监测准确性的技术方案。
技术实现思路
1、发明目的:本发明的目的是提供一种对船舶轨迹进行智能监测的方法及系统,从而提高船舶轨迹的监测准确性。
2、技术方案:本发明所述的一种对船舶轨迹进行智能监测的方法,包括以下步骤:
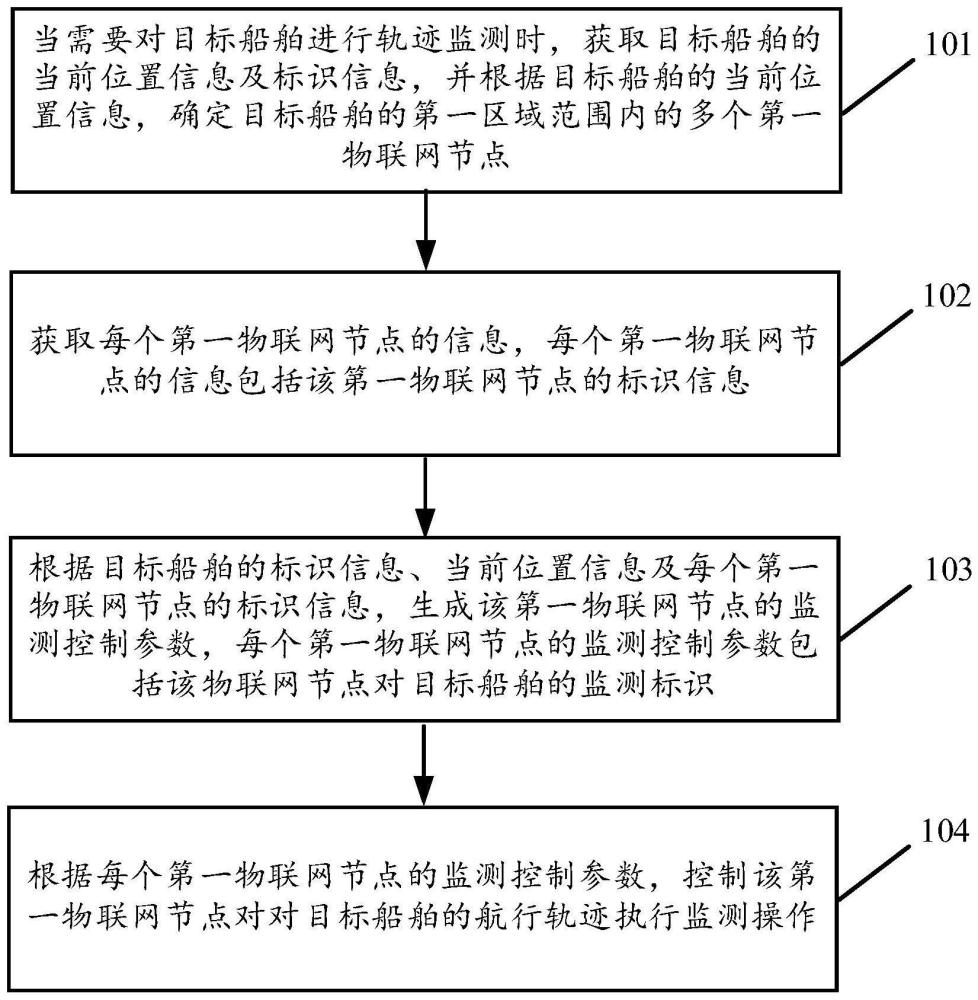
3、当需要对目标船舶进行轨迹监测时,获取目标船舶的当前位置信息及标识信息,并根据目标船舶的当前位置信息,确定目标船舶的第一区域范围内的多个第一物联网节点;
4、获取每个第一物联网节点的信息,所述第一物联网节点的信息包括该第一物联网节点的标识信息;
5、根据目标船舶的标识信息、当前位置信息及每个第一物联网节点的标识信息,生成该第一物联网节点的监测控制参数,所述第一物联网节点的监测控制参数包括该物联网节点对目标船舶的监测标识;
6、根据每个第一物联网节点的监测控制参数,控制该第一物联网节点对目标船舶的航行轨迹执行监测操作。
7、所述方法还包括以下步骤:
8、当监测到目标船舶的当前位置与第一区域范围的末端位置之间的距离值小于等于预设距离值时,获取目标船舶的第一航行信息,所述第一航行信息包括当前航行航道、当前航行方向、船舶类型及船舶行驶目的地;
9、根据第一航行信息,预测目标船舶接下来行驶的目标航道,并确定目标航道的第二区域范围内能够对目标船舶进行监测的第二物联网节点;
10、获取所有第二物联网节点的节点类型,并确定目标船舶的第二航行信息,所述第二航行信息包括当前航行速度及当前航行加速度;
11、根据目标船舶的第二航行信息及每个第二物联网节点的节点类型,确定该第二物联网节点针对目标船舶的启动监测参数,并将该第二物联网节点对应的启动监测参数发送至该第二物联网节点,以触发该第二物联网节点根据启动监测参数对目标船舶进行监测,所述启动监测参数包括启动监测时刻及所述目标船舶的标识信息。
12、所述的根据目标船舶的第二航行信息及每个第二物联网节点的节点类型,确定该第二物联网节点针对目标船舶的启动监测参数,具体为:
13、对于任意一个第二物联网节点,当第二物联网节点的节点类型用于表示该第二物联网节点为位置固定的物联网节点时,根据目标船舶的第二航行信息、当前位置信息及所述第二物联网节点的位置,分析第二物联网节点针对目标船舶的启动监测参数;
14、对于任意一个第二物联网节点,当第二物联网节点的节点类型用于表示该第二物联网节点为位置可移动的物联网节点时,确定第二物联网节点的当前信息,并根据第二物联网节点的当前信息及目标船舶的第二航行信息,计算目标船舶与第二物联网节点之间的相对距离,所述第二物联网节点的当前信息包括当前位置、移动速度、移动方向及移动加速度;
15、根据目标船舶的第二航行信息、当前位置信息、目标船舶与第二物联网节点之间的相对距离及第二物联网节点的当前信息,分析第二物联网节点针对目标船舶的启动监测参数。
16、所述方法还包括以下步骤:
17、对于任意一个第二物联网节点,根据第二物联网节点的位置与目标船舶在所述目标航道上所出现的目标区域,确定第二物联网节点的监测区域;
18、采集所述监测区域的环境信息,并根据环境信息,分析监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度,影响程度值越高,表示对监测结果的影响越大;所述环境信息包括雾气信息及水浪信息,所述水浪信息包括水浪高度及水浪波动情况;
19、根据影响程度及第二物联网节点的监测性能,确定第二物联网节点对目标船舶进行监控所需的工作参数,并将工作参数及启动监测参数进行关联,得到第二物联网节点的关联信息;
20、将每个第二物联网节点的关联信息更新至该第二物联网节点的启动监测参数,然后将更新后的第二物联网节点对应的启动监测参数发送至该第二物联网节点,以触发该第二物联网节点根据更新后的启动监测参数对目标船舶进行监测的操作。
21、所述根据环境信息,分析监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度,具体为:
22、根据所述雾气信息,确定监测区域的可见度,并根据所述水浪高度及水浪波动情况,预估第二物联网节点的晃动情况;
23、分析监测区域的可见度及第二物联网节点的晃动情况,得到监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度。
24、所述方法还包括以下步骤:
25、依次获取目标船舶航行过程中每个物联网节点对目标船舶的监测数据,所述每个物联网节点对应的监测数据包括该目标船舶的轨迹监测数据、该轨迹监测数据的监测时刻及对应的监测区域的标识信息;
26、对于任一所述监测区域,根据监测区域的标识信息及每个物联网节点对应的监测时刻,分析所有物联网节点对应的轨迹监测数据,得到在所述监测区域上目标船舶的轨迹监测结果,所述轨迹监测结果包括监测轨迹及所述监测轨迹对应的监测时间;
27、根据所有所述监测轨迹对应的监测时间,按照由早到晚对所有监测轨迹执行拼接操作,得到目标船舶的监测轨迹。
28、所述方法还包括以下步骤:
29、对于任一所述监测区域,确定所述监测区域内所有物联网节点的监测数量;
30、当监测数量大于1时,确定每个物联网节点相对目标船舶的监测方位角,并根据每个物联网节点对应的监测方位角,判断是否存在同一监测方位上监测方位角之差小于等于预设监测方位角的至少两个目标物联网节点;
31、当判断结果为否时,根据监测区域的标识信息及每个物联网节点对应的监测时刻,分析所有物联网节点对应的轨迹监测数据,得到在所述监测区域上目标船舶的轨迹监测结果的操作;
32、当判断结果为是时,对每个同一监测方向上所有目标物联网节点对应的轨迹监测数据执行整合操作,得到整合后的轨迹监测数据,并根据监测区域的标识信息,分析每个监测方向对应的轨迹监测数据,得到在所述监测区域上目标船舶的轨迹监测结果。
33、一种对船舶轨迹进行智能监测的系统,采用上述的一种对船舶轨迹进行智能监测的方法,包括以下模块:
34、获取模块:用于当需要对目标船舶进行轨迹监测时,获取目标船舶的当前位置信息及标识信息;还用于获取每个第一物联网节点的信息,所述第一物联网节点的信息包括该第一物联网节点的标识信息;
35、确定模块:用于根据目标船舶的当前位置信息,确定目标船舶的第一区域范围内的多个第一物联网节点;
36、生成模块:用于根据目标船舶的标识信息、当前位置信息及每个第一物联网节点的标识信息,生成该第一物联网节点的监测控制参数,所述第一物联网节点的监测控制参数包括该物联网节点对目标船舶的监测标识;
37、控制模块:用于根据每个第一物联网节点的监测控制参数,控制该第一物联网节点对目标船舶的航行轨迹执行监测操作。
38、优选的,所述获取模块还用于当监测到目标船舶的当前位置与第一区域范围的末端位置之间的距离值小于等于预设距离值时,获取目标船舶的第一航行信息,所述第一航行信息包括当前航行航道、当前航行方向、船舶类型及船舶行驶目的地;
39、优选的,所述系统还包括以下模块:
40、预测模块:用于根据第一航行信息预测目标船舶接下来行驶的目标航道;
41、所述确定模块还用于确定目标航道的第二区域范围内能够对目标船舶进行监测的第二物联网节点;
42、所述获取模块还用于获取所有第二物联网节点的节点类型;
43、所述确定模块还用于确定目标船舶的第二航行信息,所述第二航行信息包括当前航行速度及当前航行加速度;
44、所述确定模块还用于根据所述目标船舶的第二航行信息及每个第二物联网节点的节点类型,确定该第二物联网节点针对目标船舶的启动监测参数;
45、通信模块:用于将该第二物联网节点对应的启动监测参数发送至该第二物联网节点,以触发该第二物联网节点根据启动监测参数对目标船舶进行监测,所述第二物联网节点对应的启动监测参数包括启动监测时刻及目标船舶的标识信息。
46、优选的,所述确定模块根据目标船舶的第二航行信息及每个第二物联网节点的节点类型,确定该第二物联网节点针对目标船舶的启动监测参数的具体方式为:
47、对于任一所述第二物联网节点,当所述第二物联网节点的节点类型用于表示该第二物联网节点为位置固定的物联网节点时,根据所述目标船舶的第二航行信息、当前位置信息及所述第二物联网节点的位置,分析所述第二物联网节点针对所述目标船舶的启动监测参数;
48、对于任一所述第二物联网节点,当所述第二物联网节点的节点类型用于表示该第二物联网节点为位置可移动的物联网节点时,确定所述第二物联网节点的当前信息,并根据所述第二物联网节点的当前信息及所述目标船舶的第二航行信息,计算所述目标船舶与所述第二物联网节点之间的相对距离,所述第二物联网节点的当前信息包括当前位置、移动速度、移动方向及移动加速度;
49、根据所述目标船舶的第二航行信息、当前位置信息、所述相对距离及所述第二物联网节点的当前信息,分析所述第二物联网节点针对所述目标船舶的启动监测参数。
50、优选的,所述确定模块还用于对于任一所述第二物联网节点,根据第二物联网节点的位置与目标船舶在目标航道上所出现的目标区域,确定第二物联网节点的监测区域;
51、优选的,所述系统还包括以下模块:
52、采集模块:用于采集所述监测区域的环境信息;所述环境信息包括雾气信息及水浪信息,所述水浪信息包括水浪高度及水浪波动情况;
53、第一分析模块:用于根据环境信息,分析监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度,影响程度值越高,表示对监测结果的影响越大;
54、所述确定模块还用于根据影响程度及第二物联网节点的监测性能,确定第二物联网节点对目标船舶进行监控所需的工作参数;
55、关联模块:用于将第二物联网节点对目标船舶进行监控所需的工作参数及启动监测参数进行关联,得到关联信息;
56、更新模块:用于将每个第二物联网节点的关联信息更新至该第二物联网节点的启动监测参数,并触发通信模块将该第二物联网节点对应的启动监测参数发送至该第二物联网节点,以触发该第二物联网节点根据启动监测参数对目标船舶进行监测的操作。
57、所述第一分析模块根据环境信息,分析监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度的具体方式为:
58、根据所述雾气信息,确定所述监测区域的可见度,并根据所述水浪高度及所述水浪波动情况,预估所述第二物联网节点的晃动情况;
59、分析所述监测区域的可见度及所述第二物联网节点的晃动情况,得到监测区域的环境对第二物联网节点对目标船舶进行监测得到的监测结果的影响程度。
60、优选的,所述获取模块还用于依次获取所述目标船舶航行过程中每个物联网节点对目标船舶的监测数据,所述物联网节点对应的监测数据包括该目标船舶的轨迹监测数据、该轨迹监测数据的监测时刻及对应的监测区域的标识信息;
61、优选的,所述系统还包括以下模块:
62、第二分析模块:用于对于任一所述监测区域,根据监测区域的标识信息及每个物联网节点对应的监测时刻,分析所有物联网节点对应的轨迹监测数据,得到在监测区域上目标船舶的轨迹监测结果,所述轨迹监测结果包括监测轨迹及所述监测轨迹对应的监测时间;
63、拼接模块:用于根据所有所述监测轨迹对应的监测时间,按照由早到晚对所有监测轨迹执行拼接操作,得到目标船舶的监测轨迹。
64、优选的,所述确定模块还用于确定任一监测区域内所有物联网节点的监测数量;
65、所述确定模块还用于当监测数量大于1时,确定每个物联网节点相对目标船舶的监测方位角;
66、优选的,所述系统还包括以下模块:
67、判断模块:用于根据每个物联网节点对应的监测方位角,判断是否存在同一监测方位上监测方位角之差小于等于预设监测方位角的至少两个目标物联网节点;当判断结果为否时,第二分析模块根据所述监测区域的标识信息及每个物联网节点对应的监测时刻,分析所有物联网节点对应的轨迹监测数据,得到在监测区域上所述目标船舶的轨迹监测结果的操作;
68、整合模块:用于当判断结果为是时,对每个同一所述监测方向上所有所述目标物联网节点对应的轨迹监测数据执行整合操作,得到整合后的轨迹监测数据;
69、所述第二分析模块还用于根据监测区域的标识信息,分析每个所述监测方向对应的轨迹监测数据,得到在所述监测区域上所述目标船舶的轨迹监测结果。
70、一种计算机存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的一种对船舶轨迹进行智能监测的方法。
71、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的一种对船舶轨迹进行智能监测的方法。
72、有益效果:与现有技术相比,本发明具有如下优点:当需要对目标船舶进行轨迹监测时,获取目标船舶的当前位置信息及标识信息,并根据目标船舶的当前位置信息,确定目标船舶的第一区域范围内的多个第一物联网节点,从而获取每个第一物联网节点的标识信息,进而根据目标船舶的标识信息、当前位置信息及每个第一物联网节点的标识信息,生成该第一物联网节点的监测控制参数,如对目标船舶的监测标识,以控制该第一物联网节点对目标船舶的航行轨迹执行监测操作,从而提高目标船舶轨迹的监测准确性,进而有利于对目标船舶进行监管以及当即将发生碰撞时,有利于提前做好防碰撞准备,减少人身安全及财产损失。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186005.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表