一种边缘智能安防报警方法及系统与流程
- 国知局
- 2024-07-31 20:23:39
本发明涉及边缘计算,具体涉及一种边缘智能安防报警方法及系统。
背景技术:
1、当今社会对安全防范越来越重视,但是施工场地由于人员复杂、人流量大和内部环境复杂等原因,施工场地的安全防范一直难以解决的问题,边缘计算由于有更快的响应速度,因此越来越多施工场地选择将安全防范和边缘计算相结合,现在的施工场地面临着大量非施工场地人员的侵扰,导致建材被窃取,并且在施工场地内部,因为人员与行驶车辆没有保持安全距离,导致人员受到伤害的情况也频频发生,或者因为行驶车辆的驾驶员没有注意周遭环境,遇到陡坡或者大坑,导致车辆与驾驶员陷入危险当中,因此,研究一种基于边缘计算的施工场地智能安防方法是很有必要的。
2、现有的施工场地智能安防方法基本能够可以满足当前需求,但是还存在一定的缺陷,其具体表现在:(1)现有的施工场地智能安防方法对于未成功进入施工场地的人员缺乏一定的防范,有部分人员无法通过施工场地入口的生物信息识别闸机后,可能会想要使用其他违规方法进入施工场地,甚至会出现部分人员多次踩点,导致施工场地的安全性下降,施工场地内人员的安全无法得到保证,施工场地内财产受到损害。
3、(2)现有的施工场地智能安防方法对于施工场地内人员与各行驶车辆的安全距离缺乏一定重视,由于施工场地需要大量钢筋和沙土,因此施工场地内有许多大型车辆,而大型车辆拥有许多视野盲区,对于车身侧面和车后方,大型车辆的司机都难以时刻关注,因此当人员距离大型车辆过近时,若大型车辆正在转弯、倒车和卸货,则容易出现伤害人员的人身安全的情况,降低人员的安全性,导致人员的人身安全受到威胁。
4、(3)现有的施工场地智能安防方法对于施工场地内各行驶车辆在行驶过程是否存在风险缺少一定的关注,由于施工场地内环境复杂,会有许多较高的沙土堆,或者有许多坑洞,各行驶车辆的驾驶员难以关注各个区域,对于会出现风险的区域,有时会缺乏准确的判断,从而导致驾驶员与车辆陷入风险当中,在危害驾驶员人生安全的同时,也损害施工场地的财产。
技术实现思路
1、本发明的目的在于提供的一种边缘智能安防报警方法及系统,解决了背景技术中存在的问题。
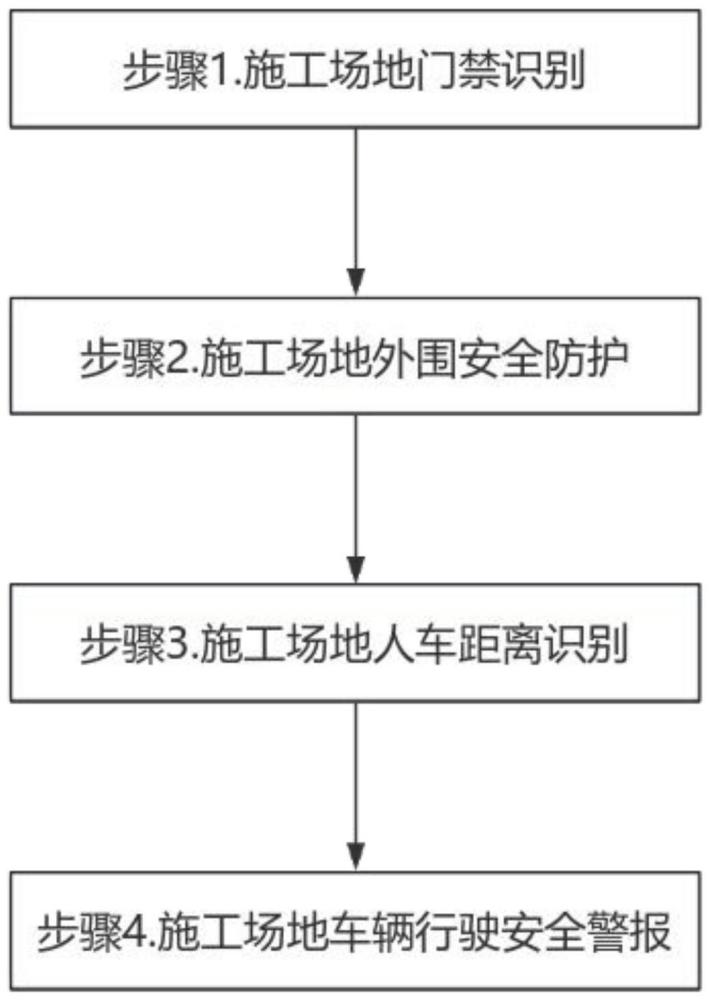
2、为解决上述技术问题,本发明采用如下技术方案:本发明第一方面提供一种边缘智能安防报警方法,包括:步骤1.施工场地门禁识别:通过施工场地所属的各通道闸机获取对应访问人员的生物信息,判断施工场地是否允许各通道闸机对应访问人员通过,将允许通过的各通道闸机对应访问人员标记为各允许人员,将不允许通过的各通道闸机对应访问人员标记为各无关人员,并将各无关人员的生物信息与当前访问时间点发送至云平台的警戒数据库。
3、步骤2.施工场地外围安全防护:本地计算机从各外围摄像头获取各无关人员的当前停留时长,并保存至本地数据库中,从云平台的警戒数据库获取各无关人员的各历史访问时间点和历史访问次数,并据此分析各无关人员的警戒系数,判断各无关人员是否需要警戒,并进行相应处理。
4、步骤3.施工场地人车距离识别:本地计算机获取施工场地所属各行驶车辆对应前gps位置信息和后gps位置信息,并获取各允许人员对应gps位置信息,分析各允许人员与施工场地所属各行驶车辆的车后警戒距离和车侧警戒距离,判断各允许人员是否出现在的危险范围,并进行相应处理。
5、步骤4.施工场地车辆行驶安全警报:本地计算机从本地数据库获取各行驶车辆预定义的车前安全距离、车侧方安全距离和车后方安全距离,判断施工场地所属各行驶车辆行驶过程是否存在风险,并进行相应处理。
6、优选地,所述分析各无关人员的警戒系数,其具体方法为:依据各无关人员的各历史访问时间点和历史访问次数af,将各无关人员的各历史访问时间点按照历史访问时间点距今从远到近的顺序进行排列,从而得到各无关人员排列后的各历史访问时间点bfp,其中f表示为各无关人员的编号,f=1,2,...,z,z为大于2的正整数,p为无关人员排列后的各历史访问时间点的编号,p=1,2.,...,w,w为大于2的正整数。
7、从本地数据库获取警戒最大访问次数c、警戒参考停留时长t1、警戒参考访问时长t2和各外围摄像头监测的视频,从各外围摄像头监测的视频获取各无关人员的各次历史对应停留的时长dfi,其中i为各次历史对应停留的时长的编号,i=1,2,...,j,j为大于2的正整数,依据各无关人员的当前停留时长rf和当前访问时间点t,分析各无关人员的警戒系数其中bfw为第f个无关人员排列后的第w个历史访问时间点,j为历史对应停留时长的数量,w表示为无关人员排列后的历史访问时间点的数量。
8、优选地,所述判断各无关人员是否需要警戒,并进行相应处理,其具体方法为:将各无关人员的警戒系数与预定义的警戒系数阈值进行比对,若某无关人员的警戒系数大于预定义的警戒系数阈值,则判断需要警戒该无关人员,将该无关人员标记为警戒人员,反之,各外围摄像头在监测范围内实时监测该无关人员,并通过各外围摄像头的监控画面,判断该无关人员是否违规进入施工场地,若发现该无关人员违规进入施工场地,则将该无关人员标记为警戒人员,从而得到各警戒人员。
9、从各无关人员的生物信息与当前访问时间点提取各警戒人员的生物信息与当前访问时间点,将其发送至施工场地安全负责人,本地计算机通过各外围摄像头的监控画面发现各警戒人员时,发送警告信息至安全负责人,并通知安保人员,将各警戒人员的实时视频上传至安保人员手机中。
10、优选地,所述判断该无关人员是否违规进入施工场地,其具体判断方法为:若该无关人员出现在某外围摄像头的监控画面,则使用长方形边框将该无关人员在该外围摄像头的监控画面中框选,从而得到该无关人员对应的长方形边框参考区域,从本地数据库获取该外围摄像头的监控画面对应禁止区域,将该无关人员对应的长方形边框参考区域与该外围摄像头的监控画面对应禁止区域进行相交比对,从而得到该无关人员对应的长方形边框参考区域与该外围摄像头的监控画面对应禁止区域的相交区域,并将其标记为该无关人员的违规进入区域,获取该无关人员的违规进入区域面积,将该无关人员的违规进入区域面积与预定义的违规进入区域面积阈值进行比对,若该无关人员的违规进入区域面积大于预定义的违规进入区域面积阈值,则判断该无关人员违规进入施工场地。
11、优选地,所述分析各允许人员与施工场地所属各行驶车辆的车后警戒距离和车侧警戒距离,其具体分析方法为:从本地数据库获取各行驶车辆的车身长度li和车后方安全距离ai,依据施工场地所属各行驶车辆对应前gps位置信息和各允许人员对应gps位置信息,得到各允许人员与和施工场地所属各行驶车辆的前相对距离nfi,并依据施工场地所属各行驶车辆后gps位置信息和各允许人员对应gps位置信息,得到各允许人员与和施工场地所属各行驶车辆的后相对距离mfi,其中f为各行驶车辆的编号,f=1,2,...,h,h为大于2的正整数,i为各允许人员的编号,i=1,2,...,j,j为大于2的正整数。
12、分析各允许人员与施工场地所属各行驶车辆的车侧警戒距离
13、分析各允许人员与施工场地所属各行驶车辆的车后警戒距离
14、优选地,所述判断各允许人员是否出现在的危险范围,并进行相应处理,其具体方法为:将各允许人员与施工场地所属各行驶车辆的车侧警戒距离与预定义的最小车侧警戒距离进行比对,若某允许人员与施工场地所属某运动车辆的车侧警戒距离小于预定义的最小车侧警戒距离阈值,则判断该允许人员出现在的危险范围,本地计算机通过连接施工场地所属该运动车辆的车内广播,警告施工场地所属该运动车辆的驾驶员车侧有人员。
15、将各允许人员与施工场地所属各行驶车辆的车后警戒距离与预定义的最小车后警戒距离进行比对,同理可判断各允许人员是否出现在的危险范围,从而警告施工场地所属对应各行驶车辆的驾驶员车后有人员。
16、优选地,所述判断施工场地所属各行驶车辆行驶过程是否存在风险,并进行相应处理,其具体方法为:本地计算机从施工场地所属各行驶车辆的各正前方微波传感器获取对应正前方接收经历时长tfg,其中g为各正前方微波传感器的编号,g=1,2,...,k,其中k为大于2的正整数,从施工场地所属各行驶车辆的各侧方微波传感器获取对应侧方接收经历时长bfe,其中e为各侧方微波传感器的编号,e=1,2,...,r,其中r为大于2的正整数,并从施工场地所属各行驶车辆的各正后方微波传感器获取对应正后方接收经历时长dfy,其中y为各侧方微波传感器的编号,y=1,2,...,q,其中q为大于2的正整数。
17、本地计算机从本地数据库获取各正前方微波传感器与地面的夹角θg、各侧方微波传感器与地面的夹角θe和各正后方微波传感器与地面的夹角θy。
18、计算施工场地所属各行驶车辆的各正前方微波传感器的障碍平行距离λfg=c*tfg*cosθg,其中c表示为光速。
19、计算施工场地所属各行驶车辆的各侧方微波传感器的障碍平行距离μfe=c*bfe*cosθe。
20、计算施工场地所属各行驶车辆的各正后方微波传感器的障碍平行距离
21、将施工场地所属某行驶车辆的某正后方微波传感器的障碍平行距离与预定义的车后安全距离进行比对,若施工场地所属该行驶车辆的该正后方微波传感器的障碍平行距离小于预定义的车后安全距离,则判断施工场地所属该行驶车辆行驶过程存在风险,并通过施工场地所属该行驶车辆的车内广播警告对应驾驶员车后有风险,同时,将施工场地所属该行驶车辆的某正前方微波传感器的障碍平行距离与预定义的车前安全距离进行比对,若施工场地所属该行驶车辆的该正前方微波传感器的障碍平行距离小于预定义的车前安全距离,则判断施工场地所属该行驶车辆行驶过程存在风险,并通过施工场地所属该行驶车辆的车内广播警告对应驾驶员车前有风险,同时,将施工场地所属该行驶车辆的某侧方微波传感器的障碍平行距离与预定义的车侧方安全距离进行比对,若施工场地所属该行驶车辆的该侧方微波传感器的障碍平行距离小于预定义的车侧方安全距离,则判断施工场地所属该行驶车辆行驶过程存在风险,并通过施工场地所属该行驶车辆的车内广播警告对应驾驶员车侧有风险。
22、本发明第二方面提供一种边缘智能安防报警系统,包括:施工场地门禁识别模块,用于通过施工场地所属的各通道闸机获取对应访问人员的生物信息,判断施工场地是否允许各通道闸机对应访问人员通过,将允许通过的各通道闸机对应访问人员标记为各允许人员,将不允许通过的各通道闸机对应访问人员标记为各无关人员,并将各无关人员的生物信息与当前访问时间点发送至云平台的警戒数据库。
23、施工场地外围安全防护模块,用于本地计算机从各外围摄像头获取各无关人员的当前停留时长,并保存至本地数据库中,从云平台的警戒数据库获取各无关人员的各历史访问时间点和历史访问次数,并据此分析各无关人员的警戒系数,判断各无关人员是否需要警戒,并进行相应处理。
24、施工场地人车距离识别模块,用于本地计算机获取施工场地所属各行驶车辆对应前gps位置信息和后gps位置信息,并获取各允许人员对应gps位置信息,分析各允许人员与施工场地所属各行驶车辆的车后警戒距离和车侧警戒距离,判断各允许人员是否出现在的危险范围,并进行相应处理。
25、施工场地车辆行驶安全警报模块,用于本地计算机从本地数据库获取各行驶车辆预定义的车前安全距离、车侧方安全距离和车后方安全距离,判断施工场地所属各行驶车辆行驶过程是否存在风险,并进行相应处理。
26、本发明的有益效果在于:(1)本发明通过判断施工场地是否允许各通道闸机对应访问人员通过,并将不允许通过的各通道闸机对应访问人员标记为各无关人员,从各外围摄像头获取各无关人员的当前停留时长,并从云平台的警戒数据库获取各无关人员的各历史访问时间点和历史访问次数,并据此分析各无关人员的警戒系数,判断各无关人员是否需要警戒,从而得到各警戒人员,发现各警戒人员时,发送警告信息至安全负责人,并通知安保人员,将各警戒人员的实时视频上传至安保人员手机中,从而提高施工场地的安全性,保证施工场地内人员的安全,避免施工场地内财产受到损害。
27、(2)本发明通过本地计算机获取施工场地所属各行驶车辆对应前gps位置信息和后gps位置信息,并获取各允许人员对应gps位置信息,从而分析得到各允许人员与施工场地所属各行驶车辆的车后警戒距离和车侧警戒距离,减少各允许人员因为过于靠近大型车辆而出现意外的情况,通过减少出现伤害人员的人身安全的情况,从而达到提升人员的安全性、避免人员的人身安全受到威胁的效果。
28、(3)本发明通过获取各行驶车辆预定义的车前安全距离、车侧方安全距离和车后方安全距离,并通过微波传感器,分析各行驶车辆的各正前方微波传感器的障碍平行距离、各侧方微波传感器的障碍平行距离和各正后方微波传感器的障碍平行距离,从而判断各行驶车辆是否有风险,协助驾驶员对四周环境进行判断,减少驾驶员与车辆陷入风险的概率,在保障驾驶员人生安全的同时,也保护施工场地的财产。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186126.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。