一种网联环境下车辆行车风险场建模方法
- 国知局
- 2024-07-31 20:34:46
本发明涉及智能网联车辆、行车风险评估领域,具体涉及一种网联环境下车辆行车风险场建模方法。
背景技术:
1、近年来,随着人工智能和物联网技术的快速发展,车联网技术已成为当前全球汽车以及交通出行领域智能化、网联化发展的主要方向。在网联环境下,车辆与互联网相连,车辆与车辆之间以及车辆与基础设施之间的通信将极大地改变道路上的交通模式,为交通安全这一痛点问题提供新的解决方案。如何充分利用网联环境下信息共享优势,恰当评估车辆行车风险,有助于预防和减少交通事故的发生,提高道路交通安全。
2、现有车辆行车风险评估模型通常基于车辆运动学和动力学理论建立,对车辆行车安全的表达基于车辆状态信息(速度、加速度、横摆角速度等)和两车相对运动关系信息(相对速度、相对距离等)实现。陶鹏飞等将车辆的各种行为归纳为效率与安全因素的相互作用,基于apf的思想将这2种因素抽象为驾驶人受到的驱动力和阻力,从而建立跟驰模型。yang将自车视为势能场中独立的电荷单元,各个因素对自车跟车行为的影响简化为车辆间相互作用的引力和斥力,据此研究横向偏距对跟车行为的影响。sattel利用机器人领域中弹性阶的概念设计了协同式车辆路径规划算法,并应用于无人驾驶车辆的车道保持系统和避撞系统,该算法考虑道路中心线及其边界形成的风险场。rossetter等运用人工势能场理论研究车道保持系统,假设车道线能够产生因道路线形而异的势能场,以车辆在势能场中的势能和车辆自身的动能建立李雅普洛夫函数,控制车辆的横向运动,实现车道保持功能。王建强等提出“行车风险场”新概念,用“行车风险场”表征人-车-路各要素对车辆行驶安全性造成的风险度,其中包含由道路中机动车、非机动车等运动物体决定的“动能场”、道路环境要素决定的“势能场”和驾驶人个体特性决定的“行为场”。综上所述,现有风险评估模型大多存在应用场景局限的问题,而较复杂的风险评估模型将风险场进行分类,这需要对每个场进行独立计算,导致计算过程繁琐,限制了方法的实用性、准确性和可扩展性,尤其是面对网联环境中需要考虑多车的情况;此外,这些方法使用实际距离来表征距离对车辆行车风险的影响,即不论其他车辆以何种角度靠近目标车辆,只要与目标车辆距离及速度大小相同,其对车辆行车风险的贡献都是相同的。而在实际场景中,车辆从旁边车道经过和同一车道跟弛在相同距离和速度影响下所带来的风险显然不同,实际距离表征距离对行车风险的影响存在一定偏差。
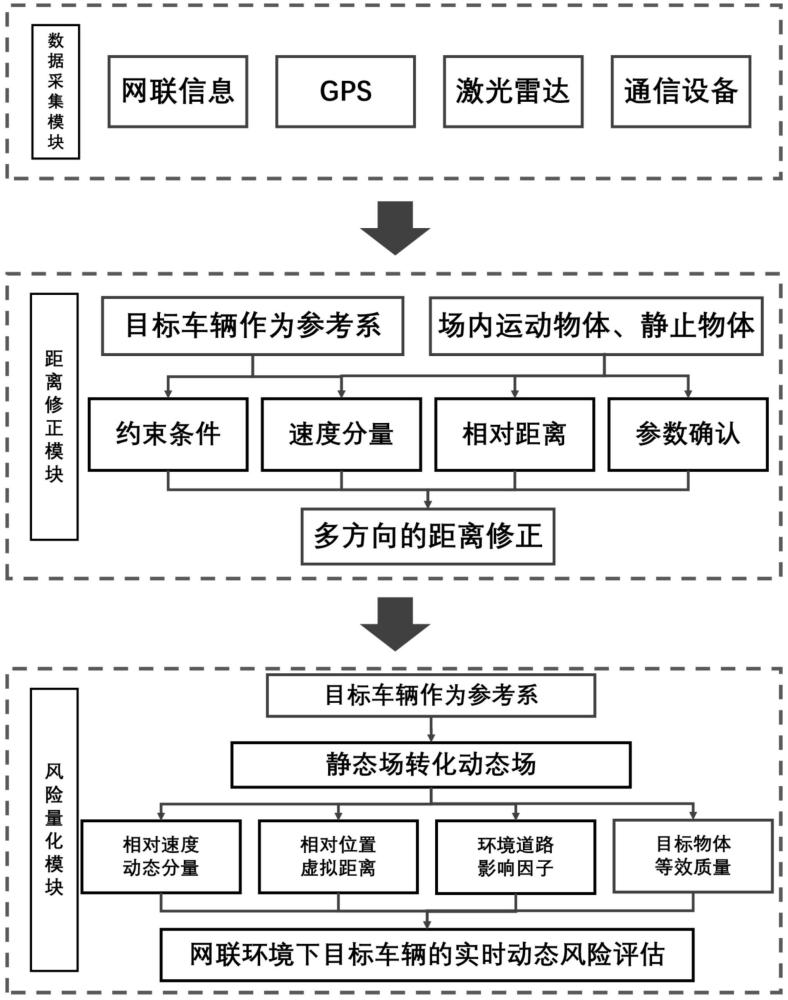
3、因此,针对现有车辆行车风险评估模型存在的缺陷,提出一种网联环境下车辆行车风险评估方法。选取目标网联车辆为参考系,通过通信技术获取目标网联车辆周围环境信息,借用速度分量将距离修正为伪距离,更好地描述了车辆从不同角度接近目标网联车辆时对行车风险的影响,并以目标网联车辆为静止参照物,结合周围环境物体相对目标网联车辆的速度信息,将场中运动物体和静止物体进行统一,计算目标网联车辆的风险,建立出针对该目标网联车辆的行车风险场,实现目标网联车辆的实时动态风险评估,为智能网联车辆主动安全控制及轨迹规划方法提供理论支撑。
技术实现思路
1、针对现有车辆行车风险评估模型存在的不足,本发明旨在借用速度分量将距离修正为伪距离,通过相对速度对场中运动物体和静止物体进行统一处理,建立出针对目标网联车辆的行车风险场。为实现以上目的,本文提供了一种网联环境下车辆行车风险场建模方法,该方法的具体实现步骤如下:
2、步骤1,通过车联网设备、毫米波雷达、gps等设备采集车辆周围环境信息,具体包括车道线、障碍物、信号灯以及周围车辆(包括自车车道的前后车以及左右车道的前后车)的运动状况数据。
3、步骤2,基于步骤1中的数据,选取自车j为目标网联车辆,并作为参照物,视其静止状态,则周围物体i相对目标网联车辆的速度为:
4、
5、其中,δxij为δt时间内物体i相对目标网联车辆j的相对位移量。
6、步骤3,风险量是根据发生事故的可能性以及严重程度来确定的。基于步骤2,在以目标网联车辆j为参照物时,物体i对周围环境产生的风险量ev_ij为:
7、
8、其中ri为物体i所处道路条件的影响因子;mi为物体i的等效质量;rij表示周围物体i与目标网联车辆j间距离矢量;表明来自于物体i的目标网联车辆j的风险的方向;lij为物体i与目标网联车辆j之间的伪距离。
9、步骤31,以目标网联车辆j运动的方向为横轴建立平面直角坐标系,设物体i的位置为(xi,yi),目标网联车辆j的位置为(xj,yj),则两者间实际距离为:
10、
11、假设目标网联车辆在车道内匀速直线行驶,后车以高于目标网联车辆的速度匀速形式,若两车的实际距离相同,当后方车辆在同一车道靠近目标网联车辆时产生的风险远高于后方车辆从两侧车道靠近目标网联车辆。因此为了更好地表征距离对车辆行车风险的影响关系,借用速度分量将实际距离修正为伪距离,以更好地描述车辆从不同角度接近目标网联车辆时行车风险的变化,物体i与目标网联车辆j的伪距离lij的表达式为:
12、
13、其中θi为相对速度方向与x轴的夹角,顺时针方向为正,k1为待定系数。
14、步骤32,确认待定系数k1,考虑到智能网联驾驶车辆遇到紧急情况会将驾驶权转交给驾驶人,k1的计算考虑驾驶人反应时间为ts,车辆初速度v0,车辆减速度为a,根据匀加速度的速度位移公式:
15、
16、设置较大相对速度、较小相对速度两种场景计算待定系数k1。场景一为同一车道的车辆以较大的相对速度v01靠近前车,若此时前车与后车在x轴方向上的距离为x1,按上述加速度、速度条件,两车刚好能在碰撞前保持相对静止;场景二为同一车道的车辆以较小的相对速度v02靠近前车,若此时前车与后车在x轴方向上的距离为x2,按上述加速度、速度条件,两车刚好能在碰撞前保持相对静止。两种场景发生碰撞的可能性是相同的,进一步可认为伪距离是相同的,即:
17、
18、代入速度、位移后得:
19、
20、其中k1与道路限速、道路环境、驾驶人反应时间等因素有关,具体大小可根据实际情况进行选择。
21、假设在某一道路中,驾驶人反应速度为0.5s,车辆减速度为-6m/s2,场景一为同一车道的车辆以vij_1=30m/s的速度靠近前方停靠在路边的车辆,若两车在x轴方向上的距离xij_1=90m,则两车刚好能在碰撞前保持相对静止;场景二为同一车道的车辆以vij_2=10m/s的相对速度靠近前车,若两车刚好能在碰撞前保持相对静止,则此时两车在x轴方向上的距离xij_2=18m。将同一道路两场景的车辆相对速度、x轴上距离差、车辆减速度及驾驶人的反应时间带入上式,求得:
22、k1≈0.15
23、步骤33,车辆自身属性主要包括了车辆的类型与质量。通常车辆的外形尺寸越大,质量越大,其碰撞时的严重程度也越高。王建强等认为车辆的碰撞严重程度与目标网联车辆当前的速度与质量均存在相关性,并通过高速公路车速及事故数据拟合出了物体i等效质量的表达式如下:
24、mi=mi×(1.566×10-14×vi6.687+0.3345)
25、其中mi为物体i的实际质量,v为物体i的速度。由该表达式可看出,在相同车速下,实际质量越大等效质量越大;在相同实际质量下,车速越高,等效质量越大,即实际质量与车速会通过事故的严重程度对风险产生影响。
26、步骤34,行车风险与道路条件有关,道路条件越差,发生事故的可能性越大。道路条件包括道路的附着系数、道路曲率、道路坡度、可见度等因素,可以将这些因素统一用“道路条件因子”来表达。定义物体i所在位置(xi,yi)处道路条件影响因子如式所示,即:
27、
28、式中,δi为道路能见度;μi为路面附着系数;ρi为道路曲率;τi为道路坡度;γ1,γ2,γ3,γ4均为待定常数,且γ1,γ2<0,γ3,γ4>0;μ*为标准路面附着系数;δ*为标准道路能见度;ρ*为标准道路曲率;τ*为标准道路坡度。ri为因道路条件不同而对行车产生不同潜在危险程度的道路条件影响因子。对于物体i,其对应道路条件影响因子ri由(xi,yi)处路面附着系数、环境能见度、道路曲率和坡度决定。随路面附着系数、道路能见度的减小,道路曲率、坡度的增加,道路影响因子增大,其他条件不变时,车辆与(xi,yi)处物体i发生碰撞的可能性增大,行车危险增大。
29、步骤4,建立风险场。计算出道路上的所有物体对目标网联车辆所形成的风险量并求和:
30、
31、ej即为目标网联车辆j此时的行车风险。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186970.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表