一种面向间歇性失智老人防走失可穿戴设备及危险性判别与预警方法
- 国知局
- 2024-07-31 20:43:13
本发明为一种面向间歇性失智老人防走失可穿戴设备及危险性判别与预警方法,涉及电子信息和计算机领域,系统应用领域为间歇性失智老人、小孩等弱势、智力残障群体的走失危险预警。
背景技术:
1、随着我国老龄化程度的加剧,社会公共安全防范意识的不高导致间歇性失智老人走失现象屡见不鲜。《中国走失人口白皮书(2020)》统计数据显示,在2020年期间我国老人走失人口数占走失总人口数的40.58%左右。数据分析显示,走失老人中72%的老人大多都出现记忆力障碍情况,老年人走失的主因是失智。目前常见的防走失方法包括信息卡片、智能手环和手表等智能通讯设备;这些方法极易造成信息泄露、且需要老人主动应答和操作、无法进行主动危险预警,不能有效地提供间歇性失智老人走失危险性的预警。
2、目前针对这一特殊群体的产品与身背寥寥无几,其中一项实用新型专利“一种基于物联网的失智老人监护系统”(申请号:cn202120806833.2)提出了一种针对失智老人的挂脖定位设备及防止设备丢失的系统,旨在解决定位设备丢失导致无法获知老人实时位置的问题。另一项国家发明专利“一种失智老人走失定位监控救助方法”(申请号:cn202011175671.3)提出了通过监测失智老人在安全区域的偏离程度,向监护人和周围人发出求助的方法。现有技术和产品无法实现利用易走失目标的位置、天气、时间、环境、场景中出现的目标物体等复杂信息,多角度自动生成走失危险等级以及根据危险等级进行的多方式主动预警。
技术实现思路
1、针对现有技术的不足,本发明考虑到间歇性失智老人的特殊性,创新性地提供了一种面向间歇性失智老人防走失可穿戴设备及危险性判别与预警方法。本发明根据老人当前所处环境的图像数据和地理位置信息中提取天气、时间、地理位置、场景、目标物体等多维特征,构建一个多模态、多维度的走失危险等级判别与主动预警系统;通过设计先进的可穿戴微型传感器设备和人工智能技术,对存在走失危险的弱势群体进行实时的走失危险等级识别:其先进性表现在:(1)设计了一款基于gps、微型摄像机的可穿戴安全头盔设备,实时采集目标老人当前的地理位置与视野图像,并将相关信息通过无线通信发送至服务器端;(2)通过服务器端实时分析老人视野图像中的天气、环境、时间、场所、目标物体、gps地理位置等信息,实现多角度、综合性的走失危险等级判别;(3)面向监护人的移动手机端,基于android系统设计了一款防走失多等级主动危险预警软件,该软件界面直观地呈现了老年人的第一视角图像信息和其所在位置于地图上的实时位置;引入了多等级主动预警机制,无需依赖老人的操作或回应,自动根据走失危险等级的识别结果进行主动预警。
2、本发明解决其技术问题所采用的技术方案是一种面向间歇性失智老人防走失可穿戴设备及危险性判别与预警方法,包括如下步骤:
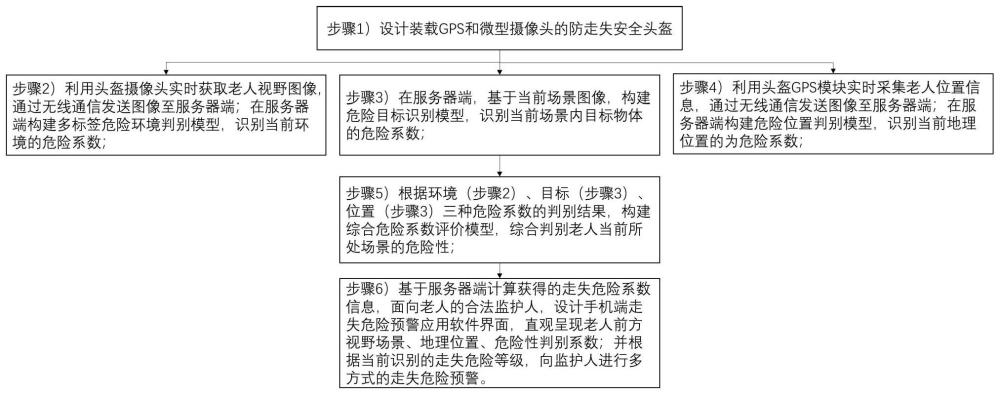
3、步骤1)设计装载gps和微型摄像头的防走失安全头盔;
4、步骤2)利用头盔摄像头实时获取老人视野图像,通过无线通信发送图像至服务器端;在服务器端构建多标签危险环境判别模型,识别当前环境的危险系数;
5、步骤3)在服务器端,基于当前场景图像,构建危险目标识别模型,识别当前场景内目标物体的危险系数;
6、步骤4)利用头盔gps模块实时采集老人位置信息,通过无线通信发送图像至服务器端;在服务器端构建危险位置判别模型,识别当前地理位置的为危险系数;
7、步骤5)根据环境(步骤2)、目标(步骤3)、位置(步骤3)三种危险系数的判别结果,构建综合危险系数评价模型,综合判别老人当前所处场景的危险性;
8、步骤6)基于服务器端计算获得的走失危险系数信息,面向老人的合法监护人,设计手机端走失危险预警应用软件界面,直观呈现老人前方视野场景、地理位置、危险性判别系数;
9、步骤7)根据当前识别的走失危险等级,在监护人手机端实现多方式的走失危险主动预警。
10、步骤1)的具体步骤如下:
11、(1-1)设计安全头盔端传感器(gps、微型摄像头)装载盒,具体内容如下:
12、(1-1-a)传感器装载盒整体为类长方体:尺寸为长8.5厘米×宽8.5厘米×高6.5厘米,上表面厚度5毫米,其余各面厚3毫米。为更好地契合安全头盔,将装载盒体后端垂直表面设计为贴合头盔前表面弧度的弧面;
13、(1-1-b)传感器装载盒正前垂直端面设计为一个可拆卸的长方形盖面,为摄像头的镜头露出,在盖面正中心位置开设一个直径为1.5厘米的孔,摄像头孔的上方刻有标识性的“微eye微爱”字样;长方形盖面的左右两侧各有一个向外凸出的m3孔径定位耳,确保盖面利用螺钉固定在装载盒体上;
14、(1-1-c)传感器装载盒上水平表面开设一个放置gps模块的凹槽,尺寸为长度5厘米×宽3.9厘米×深0.4厘米,在凹槽上方开设直径为1厘米的小孔,用于连接gps模块数据线;
15、(1-1-d)传感器装载盒上水平表面靠近前端垂直长方面和后端垂直弧面的边沿位置,设计一个向上突出的圆角长方体部分,该部分开设一个长2.1厘米×宽0.1厘米的固定绑带穿孔;在装载盒体的左右侧垂直表面靠近后端弧面的位置各设计一个向外凸起的圆角长方体部分,该部分开设固定绑带穿孔;在左右侧垂直表面靠近前端的位置,设有与盖面的m3定位孔相同的定位孔,两者长度之和为固定螺钉的长度。在传感器装载盒体的左右侧垂直表面上开设一个小孔,用于穿过电池和太阳能充电板的充电线。
16、(1-2)设计安全头盔端电池装载盒,具体步骤如下:
17、(1-2-a)电池装载盒整体为类长方体,具体尺寸为长7.5厘米×宽3.9厘米×高4.5厘米的长方体,壁厚为3毫米;为更好贴合安全头盔,将装载盒体前端垂直表面设计为贴合头盔后表面弧度的弧面;
18、(1-2-b)在电池盒的前端弧面位置,设计一个向上突出的圆角长方体,该部分开设一个前后通透的固定绑带穿孔,尺寸为长2.1厘米×宽0.1厘米;同时,在电池盒左右两侧表面,靠近前端弧面的位置开设相同的固定绑带穿孔;
19、(1-2-c)在电池盒的后端表面配置了一个可拆卸的盖面,该盖子的左右两侧各有一个向外凸出的外耳,高部分开设m3定位孔,以确保盖子可以固定在电池盒壳体上;此外,在盖面左右侧表面靠近后端位置,设有与盖面的m3定位孔相对应的定位孔,两者的长度合刚好与一颗螺钉的长度相匹配;电池盒的右侧表面开设有一个小孔,用于引出电池充电线,方便电池充电。
20、(1-3)防走失安全头盔端gps和摄像头的装载方法,具体步骤如下:
21、(1-3-a)将gps与摄像头布置在传感器装载盒内,具体方法如下:使用四个铜棒(固定螺栓)依次插入在摄像头模块、4g通信模块以及供电模块的四个边角孔,将上述连接好的三层模块板固定在传感器装载盒内;gps模块被安装在传感器装载盒上表面的凹槽中;将数据传输线从组装盒上表面的小孔接入,与盒内4g通信模块上的gps接口相连接;将摄像头镜头从盖面中间圆孔露出,并使用螺钉将前端盖面扭紧固定;
22、(1-3-b)将电池组布置在电池装载盒的内,具体方法如下:将电池组放在电池装载盒的内,通过电池盒右侧的小孔引出充电线,并从装载盒右侧的小孔内引入,将充电线与供电模块的电池接口连接,最后,将盖面覆盖在组装盒的后端,并使用螺钉将后端盖面扭紧固定;
23、(1-3-c)将传感器转载盒、电池组装载盒固定在安全头盔上,具体方法如下:将传感器装载盒固定在安全头盔的帽檐上,电池盒固定在安全头盔的后脑处,使用固定绑带沿着帽体上的穿孔将传感器装载盒和电池装载盒分别加固在安全头盔的前后;柔性太阳能充电板固定在安全头盔的正上方区域;同时,通过传感器装载盒左侧的小孔引入充电线,并将其连接到供电模块的太阳能充电接口。
24、步骤2)的具体步骤如下:
25、2-1利用头盔摄像头获取老人视野图像,通过无线通信发送图像至服务器端;在服务器端制作多标签危险环境系数数据集,具体内容包括:
26、设定9种危险环境判别因素标签,包括5种天气(晴天、多云、降雪、降雨、降雾)、2种时间(白天、晚上)、2种环境(室内、室外)。创建一个以上述9种因素作为输入,以“安全”、“低危”、“中危”和“高危”4种危险等级作为输出的多标签危险环境系数数据集;最终生成的多标签危险环境系数数据集中每一个图像对应着一个包含了13位字符串,前9位用二进制表示,代表了sunny、cloudy、snow、rain、foggy、night、indoor、outdoor这九个危险因素;后4位十进制数代表了将该图像数据分为安全、低危、中危、高危四个类别,对应的编号为0、1、2、3;
27、2-2构建多标签危险环境判别网络模型,该网络包括:vgg16底层特征提取层、多标签特征融合层、四分类层;
28、其中,vgg16底层特征提取卷积层保留了原始的特征提取结构,具体包括:一个输入层(224×224×3)、两个3×3卷积层、一个最大池化层(112×112×3)、两个3×3卷积层、一个最大池化层(56×56×256)、三个3×3卷积层、一个最大池化层(28×28×512)、三个3×3卷积层、一个最大池化层(14×14×512)、三个3×3卷积层、一个最大池化层(7×7×512),最终输出为7×7×512的底层特征图;多标签特征融合层由三个全连接层组成,用于对提取到的图像特征进行非线性空间映射,这三个全连接层的神经元数量分别为4096、4096、9;四分类层模块包括三个全连接层和一个softmax层,前三个全连接层负责对图像特征进行非线性空间映射,而softmax层则用于获取场景危险性分类的概率,这三个全连接层的神经元数量分别为4096、4096、4。
29、步骤3)的具体步骤如下:
30、3-1构建pytorch框架下的yolov5s 6.0轻量化目标检测网络,该网络由四个模块组成:输入模块、主干网络模块、颈部网络模块和预测端模块;
31、3-2制作危险目标检测数据集,包括行人(people)和车(vehicle)两类图像,数量分别为1500张和1500张,将数据集按照8:2的比例划分为训练集和验证集;使用labelimg工具对这两类图像的训练集进行手动标记,并进行200轮训练生成best.pt模型并通过验证集数据检验了训练生成的模型效果;
32、3-3基于训练好的目标检测网络,构建目标物体危险系数判别函数,具体判定步骤如下:首先,将图像划分为三个区域:离中心点左右四分之一的图片长度的区域为危险判别区,剩下的左右两边为非危险判别区;如果危险判别区的人数少于3且没有车,则判断这个场景不存在人和车带来的目标物体危险,反之则判断这个场景存在目标物体危险。
33、步骤4)的具体步骤如下:
34、4-1确定地理位置特征数据,包括:老人离家的距离、老人离家的时间、老人运动的方向;
35、4-2将上述地理位置特征数据进行聚类分析,具体步骤如下:老人离家的距离分为四个类别:<0.1公里、0.1~1公里、1~5公里、>5公里;将老人离家的时间分为四个类别:<10分钟、10~30分钟、30分钟~60分钟、>1小时;老人运动的方向将被分为:远离家方向和返回家方向;
36、4-3构建基于决策树的地理位置危险系数判别模型。选择“老人离家的距离”作为决策树的根节点,计算“老人离家的时间”和“老人运动的方向”两个特征的gini系数,以确定决策树模型的内部节点和叶子节点,gini系数的计算公式如下:
37、
38、其中,表示pk某一类别的发生概率。
39、步骤5)的具体步骤如下:
40、5-1确定输入数据的三个危险系数特征,包括:环境危险性系数、目标物体危险性系数、地理位置危险性系数;
41、5-2基于上述三种危险系数特征,构建基于决策树的综合危险性评价模型;选择“环境危险性系数”作为决策树的根节点,该特征在尽可能最好地对危险性进行综合评价方面具有最高的分类能力;计算“目标物体危险性系数”和“地理位置危险性系数”两个特征的gini系数,以确定决策树模型的内部节点和叶子节点;gini系数的计算公式见1.1。
42、步骤6)的具体内容:
43、a.将手机端的走失危险预警软件界面分为上、下两个部分;
44、b.在界面的上半部分,实时显示老人当前所处的场景,并清晰标注危险判别区和非危险判别区,展示检测到的人和车矩形框,以及以文字形式呈现的当前场景的天气、白天或晚上、室内或室外、场景类别等详细信息;提供老人所处场景的危险性综合评价;
45、c.在界面的下半部分,通过地图实时显示老人当前位置,并追踪老年人的行动轨迹;同时,使用热力图形式展示老年人过去的行动路线。
46、步骤7)的具体内容:
47、a.当走失预警等级为“低级危险”时,通过短信形式向监护人手机发送报警信息;报警信息包括文字描述与当前失危险预警应用软件界面的监控结果画面;
48、b.当走失预警等级为“中级危险”时,通过“手机震动”、强制弹窗“失危险预警应用软件界面”的形式,通过短信形式向监护人手机发送报警信息;
49、c.当走失预警等级为“高级危险”时,通过“自动语音通话提示”,并强制弹窗“失危险预警应用软件界面”的形式,向监护人手机发送报警信息。
50、有益效果:本发明提出了一种面向间歇性失智老人防走失可穿戴设备及危险性判别与预警方法,旨在通过可穿戴微型传感器对易走失老人进行实时的位置与视野图像信息采集;通过无线通信与人工智能技术在服务器端从视野图像和地理位置信息中提取天气、时间、位置、场景、环境、危险目标等特征;构建多模态走失风险预测模型,对目标当前场景进行走失危险等级识别;并面向合法监护人设计手机端防走失危险等级预警软件界面,直观呈现间歇性失智老人的第一视角画面和其所处位置,并根据走失危险等级的判别结果,实现多等级、多方式的主动预警;实现了无需老人操作、配合,在合法监护人手机端进行老人可视化监护和主动预警,使监护人能够直观、快速地了解老人的当前情况。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187562.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表