一种考虑冲突风险的智能网联交叉口控制方法
- 国知局
- 2024-07-31 21:15:59
本发明属于智能交通控制领域,具体涉及一种考虑冲突风险的智能网联交叉口控制方法。
背景技术:
1、车辆冲突风险评估方法主要包括确定性方法和基于概率的方法,确定性方法一般通过已预先确定的指标阈值来评估车辆之间的冲突风险,指标如time-to-collision(ttc)、post-encroachment-time(pet)等;基于概率的方法根据车辆间的时空关系和不确定性因素,对冲突风险进行概率建模,如shin等(2018)利用车-车通信预测车辆位置,并根据不确定性边界内的碰撞案例个数进行风险概率评估(论文题目:human-centered riskassessment of an automated vehicle using vehicular wireless communication);li等(2021)基于风险概率评估提出一种具有驾驶偏好的避撞策略,结合多项安全指标保证不同驾驶场景下的行驶安全(论文题目:risk assessment based collision avoidancedecision-making for autonomous vehicles in multi-scenarios)。然而,上述研究主要针对两车之间的冲突风险进行分析,缺乏对交叉口整体安全的评估。
2、在智能网联环境下,车辆可以相互协作、相互穿插地通过交叉口,而无需信号灯的控制,有效提高了车辆在交叉口的通行效率,已有针对智能网联环境下交叉口控制的研究主要将降低车辆延误、提高通行效率作为目标,大多假设两车不同时占用同一网格或同一冲突点时无冲突风险,未考虑车辆间的时空关系导致的不确定性影响,对于车辆行驶安全的研究不足。
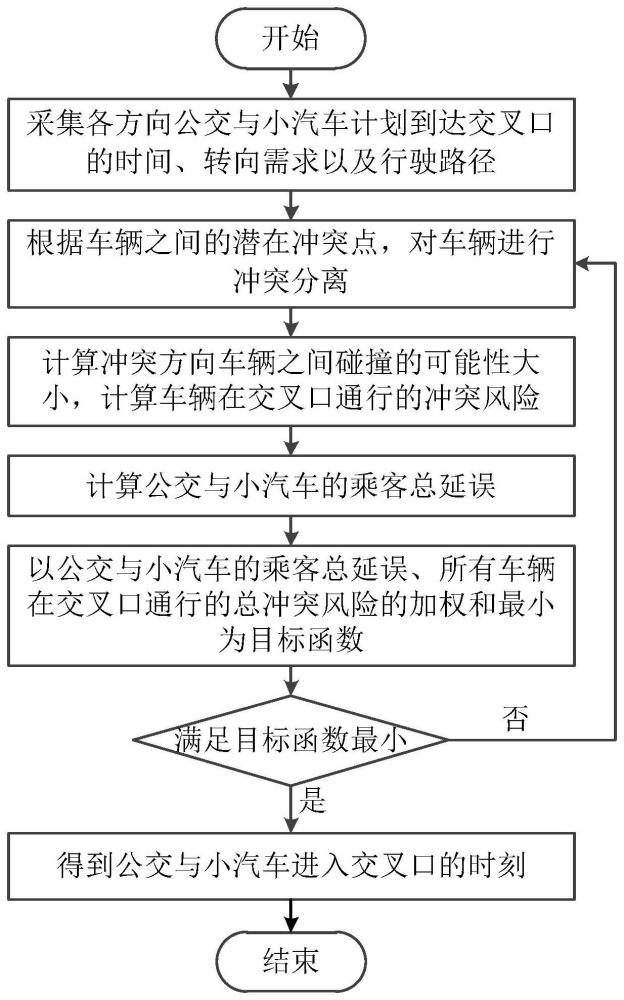
3、本发明提供了一种考虑冲突风险的智能网联交叉口控制方法,考虑到达交叉口的车辆包含公交与小汽车,该方法计算了车辆在交叉口通行的冲突风险、公交与小汽车的乘客总延误,并以公交与小汽车的乘客总延误、所有车辆在交叉口通行的总冲突风险的加权和最小为目标,对公交与小汽车进入交叉口的时刻进行优化,旨在提高车辆在交叉口的通行安全,同时减少对交叉口乘客延误的影响。
技术实现思路
1、技术问题:本发明提供了一种考虑冲突风险的智能网联交叉口控制方法,对公交与小汽车进入交叉口的时刻进行优化,从而提升车辆在交叉口的通行安全,同时降低乘客延误。
2、技术方案:为解决上述技术问题,本发明的一种考虑冲突风险的智能网联交叉口控制方法,包括如下步骤:
3、步骤1:采集各方向的公交与小汽车计划到达交叉口的时间、转向需求以及在交叉口内部的行驶轨迹;
4、步骤2:计算冲突方向车辆之间碰撞的可能性大小,从而计算车辆在交叉口通行的冲突风险,同时,计算公交与小汽车的乘客总延误;
5、步骤3:以公交与小汽车的乘客总延误、所有车辆在交叉口通行的总冲突风险的加权和最小为目标函数,对公交与小汽车进入交叉口的时刻进行优化;
6、本发明中,步骤1中,采集各方向的公交与小汽车计划到达交叉口的时间、转向需求以及在交叉口内部的行驶轨迹,包括如下步骤:
7、步骤11:交叉口的进口方向用o表示,o∈{e,w,s,n},其中e,w,s,n分别表示东、西、南、北四个方向,出口方向用d表示,d∈{e,w,s,n},各方向的进口道分为左转、直行、右转车道;车辆的编号为j,j∈j,j表示到达交叉口的所有车辆的集合,其中,a表示到达交叉口的小汽车集合,b表示到达交叉口的公交车集合。车辆匀速通过交叉口,车速为v,车身长度为lj,车辆j计划到达交叉口的时刻用tj表示,车辆j的路径用rj表示;车辆之间的潜在冲突点用c表示,c∈c,c表示所有冲突点的集合。
8、步骤12:车辆进入交叉口的时刻不得小于计划到达交叉口的时刻,如公式(1)所示:
9、
10、其中,tj′表示车辆进入交叉口的时刻,tj表示车辆计划到达交叉口的时刻。
11、后车进入交叉口的时刻不得早于前车,如公式(2)所示:
12、
13、其中,i表示车辆j的后车。
14、确定车辆是否经过冲突点,如公式(3)所示。
15、λj,c=ζc,r j∈j,c∈c,r=rj (3)
16、其中,rj表示车辆j在交叉口内部的行驶路径,ζc,r为二元参数,ζc,r=1表示冲突点c在路径r上,否则,ζc,r=0;λj,c为二元参数,λj,c=1表示车辆j经过冲突点c,否则,λj,c=0。
17、若车辆经过冲突点,则计算其到达以及离开冲突点的时刻,如公式(4)、(5)所示:
18、tj,c=tj′+γc,r j∈j,c∈c,r=rk (4)
19、tj′,c=tj′+γc′,r j∈j,c∈c,r=rk (5)
20、其中,tj,c与tj′,c分别表示车辆到达与离开冲突点的时刻,γc,r表示车辆沿其行驶路径从进入交叉口至到达冲突点所需时间,γc′,r表示车辆沿其行驶路径从进入交叉口至离开冲突点所需时间。
21、对于经过同一冲突点的车辆进行冲突分离,如公式(6)、(7)所示:
22、
23、
24、yi,j为二元变量,yi,j=1表示车辆i比车辆j先到达冲突点,yi,j=0表示车辆j比车辆i先到达冲突点。
25、本发明中,步骤2中,计算冲突方向车辆之间碰撞的可能性大小,从而计算车辆在交叉口通行的冲突风险,同时,计算公交与小汽车的乘客总延误,包括如下步骤:
26、步骤21:冲突方向车辆的轨迹示意图如图2所示,计算冲突方向车辆之间碰撞的可能性大小,如公式(8)、(9)所示:
27、若yj,k=0,则δtj,k=tj,c-t′k,c j∈j k∈kj c=cj,k (8)
28、若yj,k=1,则δtj,k=tk,c-tj′,c j∈j k∈kj c=cj,k (9)
29、公式(8)、(9)中,j表示到达交叉口的所有车辆的集合,kj表示与车辆j有冲突的车辆集合,车辆j与车辆k为相互冲突的车辆,冲突点的编号用c表示,cj,k表示车辆j与车辆k之间的冲突点;yj,k为二元变量,表示车辆到达冲突点的先后次序,yj,k=1表示车辆j比车辆k先到达冲突点,yj,k=0表示车辆k比车辆j先到达冲突点;tj,c与tj′,c分别表示车辆j到达与离开冲突点的时刻,tk,c与t′k,c分别表示车辆k到达与离开冲突点的时刻;δtj,k表示车辆j与车辆k的碰撞可能性大小,通过计算后车到达冲突点与前车离开冲突点的时间差得到;
30、对公式(8)、(9)进行线性化处理,如公式(10)、(11)所示:
31、tj,c-t′k,c-m(1-λj,c)-m(1-λk,c)-myj,k≤δtj,k≤tj,c-t′k,c+m(1-λj,c)-m(1-λk,c)+
32、myj,k,j∈j,k∈kj,c∈c(10)
33、tk,c-tj′,c-m(1-λj,c)-m(1-λk,c)-m(1-yj,k)≤δtj,k≤tk,c-tj′,c+m(1-λj,c)-m(1-
34、λk,c)+m(1-yj,k),j∈j,k∈kj,c∈c(11)
35、公式(10)、(11)中,m为正整数9999,c表示交叉口内部冲突点集合;λj,c、λk,c为二元参数,λj,c=1与λk,c=1分别表示车辆j与车辆k经过冲突点c,λb,c=0与λk,c=0分别表示车辆j与车辆k不经过冲突点c;
36、步骤22:根据δtb,k的值计算冲突车辆之间的冲突风险大小,如公式(12)、(13)所示:
37、若δtj,k≥x,则ψj,k=0 j∈j,k∈kj (12)
38、若δtj,k<x,则ψj,k=x-δtj,k j∈j,k∈kj (13)
39、公式(12)、(13)中,x为一个参数,表示冲突车辆之间无冲突风险的临界值,ψj,k表示车辆j与车辆k之间的冲突风险值;
40、对公式(12)、(13)进行线性化处理,如公式(14)-(17)所示:
41、δtj,k-x≥-m(1-δj,k) j∈j,k∈kj (14)
42、δtj,k-x<mδj,k j∈j,k∈kj (15)
43、-m(1-δj,k)≤ψj,k≤m(1-δj,k) j∈j,k∈kj (16)
44、x-δtj,k-mδj,k≤ψj,k≤x-δtj,k+mδj,k j∈j,k∈kj (17)
45、公式(14)-(17)中,δj,k为二元变量,δj,k=1表示车辆j与车辆k之间无冲突风险,即δtj,k≥x;δj,k=0表示车辆j与车辆k之间存在冲突风险,即δtj,k<x;
46、计算车辆j在交叉口通行的冲突风险,如公式(18)所示:
47、φj=∑k∈kjψj,k j∈j (18)
48、其中,φj表示车辆j在交叉口通行的冲突风险;
49、步骤23:计算公交与小汽车的乘客总延误,如公式(19)-(20)所示:
50、
51、dpassenger=pb∑b∈bdb+pa∑a∈ada (20)
52、公式(19)中,j表示到达交叉口的所有车辆的集合,tj′表示车辆进入交叉口的时刻,tj表示车辆计划到达交叉口的时刻,dj表示车辆的延误,通过计算车辆进入交叉口的时刻与车辆计划到达交叉口的时刻之差得到;公式(20)中,a表示到达交叉口的小汽车集合,b表示到达交叉口的公交车集合,da表示小汽车的延误,pa表示每辆小汽车的乘客人数,db表示公交车的延误,pb表示每辆公交车的乘客人数,dpassenger表示公交与小汽车的乘客总延误。
53、本发明中,步骤3中,以公交与小汽车的乘客总延误、所有车辆在交叉口通行的总冲突风险的加权和最小为目标函数,对公交与小汽车进入交叉口的时刻进行优化,包括如下步骤:
54、步骤31:目标函数由公式(21)计算:
55、minωdpassenger+(1-ω)∑j∈jφj(21)
56、其中,dpassenger表示公交与小汽车的乘客总延误,φj表示车辆j在交叉口通行的冲突风险,∑j∈jφj表示所有车辆在交叉口通行的总冲突风险,ω为乘客总延误的权重系数,ω∈(0,1]。
57、有益效果:本发明与现有技术相比,具有以下优点:
58、本发明综合考虑了车辆在智能网联交叉口的通行效率与安全问题,以公交与小汽车的乘客总延误、所有车辆在交叉口通行的总冲突风险的加权和最小为目标函数,对公交与小汽车进入交叉口的时间进行优化,从而降低冲突方向车辆之间的冲突风险,提升车辆在交叉口内部通行的安全,同时减少对交叉口乘客延误的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189052.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种实验室安全报警设备
下一篇
返回列表