自动驾驶车辆场景创建系统的制作方法
- 国知局
- 2024-07-31 21:25:06
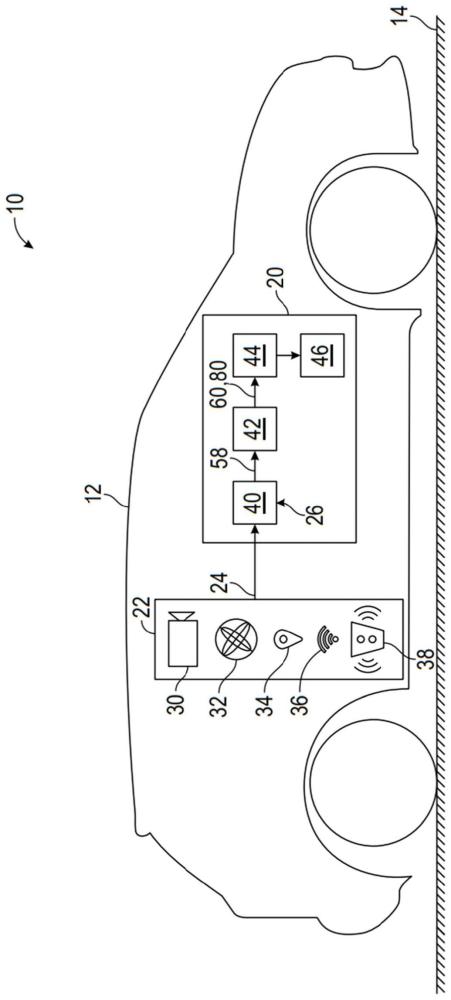
本公开涉及一种用于自动驾驶车辆的场景创建系统,其中场景创建系统对感知和地图数据进行分段、分类和重新组合以重新创建自动驾驶车辆周围环境的场景。
背景技术:
1、车辆自动驾驶系统是一个复杂的系统,包括许多不同的方面。例如,自动驾驶系统可能包括多个传感器来收集有关车辆周围环境的感知数据。有时,传感器收集的感知数据可能会不准确、有性能限制和噪声。例如,运动可能导致一台或多台摄像机收集的图像数据变得模糊。另一个例子,雷达和激光雷达传感器可能会受到雨、雾或雪等恶劣天气条件的影响。除了传感器之外,自动驾驶系统还利用地图数据。然而,有时地图数据中可能存在缺失或不准确的信息。例如,由于施工而收集地图数据,道路网络可能发生变化。此外,由于预算限制,有时可能无法对道路进行全面调查。
2、因此,虽然自动驾驶系统实现了其预期目的,但本领域需要确定车辆周围环境的改进表示。
技术实现思路
1、根据多个方面,公开了一种用于自动驾驶车辆的场景创建系统,并且包括一个或多个控制器,其执行指令以接收自动驾驶车辆正在行驶的道路的感知数据和地图数据。该一个或多个控制器基于感知数据和地图数据来识别自动驾驶车辆所行驶的道路的多个车道段。该一个或多个控制器基于多个车道段之间的空间关系将多个车道段连接在一起以创建车道图。该一个或多个控制器将车道图的多个车道段中的每一个分类为一个或多个车道属性,其中车道属性表示与每个车道段相关联的一个或多个允许的操纵。该一个或多个控制器基于多个车道段之间的空间关系和每个车道段的车道属性来重新组合多个车道段以创建道路的表示。该一个或多个控制器基于作为道路一部分的车道的表示来重新创建自动驾驶车辆周围的环境场景。
2、另一方面,一个或多个控制器执行基于启发式的算法,该算法应用一种或多种规则驱动技术来将道路划分成车道段。
3、在又一方面,规则驱动技术通过检测道路中的几何变化来划分道路。
4、在一方面,道路中的几何变化指示将允许的操纵添加到道路。
5、另一方面,车道段之间的空间关系包括以下之一:上游、下游、左侧、右侧。
6、在又一方面,一个或多个控制器通过以下方式对多个车道段进行分类:构建将车道图表示为互连节点的网络的节点地图,其中车道图的多个车道段中的每一个由节点表示。
7、在一方面,该一个或多个控制器通过为作为节点地图的一部分的每个节点构建特征向量并执行基于启发式的逻辑进行分类,以将具体特征向量的对应车道段分类为一个或多个具体的车道属性。
8、另一方面,在执行基于启发式的逻辑之前,首先查找表和逻辑树以特定车道属性来检查具体特征向量的对应车道段。
9、在又一方面,节点地图的节点通过边缘彼此连接,并且其中边缘表示车道段之间的空间关系。
10、在一方面,特征向量是对应节点的一个或多个特性、连接到对应节点的相邻节点的一个或多个特性、以及对应节点与相邻节点之间的空间关系的数值表示。
11、另一方面,车道属性包括以下一个或多个:直行、左转、右转、双向、分割和驻车。
12、在又一方面,该一个或多个控制器执行指令以将场景传输至自动驾驶车辆规划器。
13、在一方面,重建场景包括通过延伸作为主车道的多个车道段来构建作为道路的一部分的车道、基于相邻车道段的驾驶方向构建作为道路的一部分的道路以及构建被分配到每个车道的操纵。
14、另一方面,公开了一种用于通过场景创建系统来重建自动驾驶车辆周围环境的场景的方法。该方法包括由一个或多个控制器接收自动驾驶车辆正在行驶的道路的感知数据和地图数据。该方法还包括由一个或多个控制器基于感知数据和地图数据来识别自动驾驶车辆所行驶的道路的多个车道段。该方法还包括由一个或多个控制器基于多个车道段之间的空间关系将多个车道段连接在一起以创建车道图。该方法还包括由一个或多个控制器将车道图的多个车道段中的每一个分类为多个或多个车道属性,其中车道属性表示与每个车道段相关联的一个或多个允许的操纵。该方法包括由一个或多个控制器基于多个车道段之间的空间关系和每个车道段的车道属性来重新组装多个车道段以创建道路的表示。该方法包括由一个或多个控制器基于道路的表示来重建自动驾驶车辆周围的环境场景。该方法包括将场景传输至自动驾驶车辆规划器。
15、在又一方面,公开了一种用于自动驾驶车辆的场景创建系统。该场景创建系统包括一个或多个控制器,该控制器执行指令以接收自动驾驶车辆正在行驶的道路的感知数据和地图数据。该一个或多个控制器基于感知数据和地图数据来识别自动驾驶车辆所行驶的道路的多个车道段。该一个或多个控制器基于多个车道段之间的空间关系将多个车道段连接在一起以创建车道图。该一个或多个控制器将车道图的多个车道段中的每一个分类为一个或多个车道属性,其中车道属性表示与每个车道段相关联的一个或多个允许的操纵,并且其中该一个或多个控制器通过构建将车道图表示为互连节点的网络的节点地图来对特征向量进行分类;其中车道图的多个车道段中的每一个由节点表示;为作为节点地图的一部分的每个节点构建特征向量,并且执行基于启发式的逻辑以将具体特征向量的对应车道段分类为一个或多个特定车道属性。该一个或多个控制器基于多个车道段之间的空间关系和每个车道段的车道属性来重新组合多个车道段以创建道路的表示。该一个或多个控制器基于道路的表示来重建自动驾驶车辆周围的环境场景。
16、另一方面,该一个或多个控制器执行基于启发式的算法,该算法应用一种或多种规则驱动技术来将道路划分成车道段。
17、在又一方面,规则驱动技术通过检测道路中的几何变化来划分道路。
18、在一方面,道路中的几何变化指示将允许的操纵添加到道路。
19、另一方面,车道段之间的空间关系包括以下之一:上游、下游、左侧、右侧。
20、又另一方面,在执行基于启发式的逻辑之前,首先查找表和逻辑树以特定车道属性来检查具体特征向量的对应车道段。
21、进一步的应用领域将从本文提供的描述中变得显而易见。应当理解,这些描述和具体示例仅用于说明的目的,并不旨在限制本公开的范围。
技术特征:1.一种自动驾驶车辆的场景创建系统,所述场景创建系统包括:
2.根据权利要求1所述的场景创建系统,其中所述一个或多个控制器执行基于启发式的算法,所述算法应用一种或多种规则驱动技术来将所述道路划分成所述车道段。
3.根据权利要求2所述的场景创建系统,其中所述规则驱动技术通过检测所述道路中的几何变化来划分所述道路。
4.根据权利要求3所述的场景创建系统,其中所述道路中的所述几何变化指示将允许的操纵添加到所述道路。
5.根据权利要求1所述的场景创建系统,其中,所述车道段之间的所述空间关系包括以下之一:上游、下游、左侧、右侧。
6.根据权利要求1所述的场景创建系统,其中所述一个或多个控制器通过以下方式对所述多个车道段进行分类:
7.根据权利要求6所述的场景创建系统,其中所述一个或多个控制器通过以下方式对所述多个车道段进行分类:
8.根据权利要求7所述的场景创建系统,其中,在执行基于启发式的逻辑之前,首先查找表和逻辑树以特定车道属性来检查具体特征向量的对应车道段。
9.根据权利要求7所述的场景创建系统,其中所述节点地图的节点通过边缘彼此连接,并且其中所述边缘表示所述车道段之间的所述空间关系。
10.根据权利要求7所述的场景创建系统,其中,所述特征向量是对应节点的一种或多种特征、与对应节点连接的相邻节点的一种或多种特征、以及对应节点与相邻节点之间的空间关系的数值表示。
技术总结一种用于自动驾驶车辆的场景创建系统,包括一个或多个控制器,该控制器执行指令以接收自动驾驶车辆正在行驶的道路的感知数据和地图数据,并基于以下该感知数据和该地图数据来识别自动驾驶车辆所行驶的道路的多个车道段。该一个或多个控制器基于多个车道段之间的空间关系将多个车道段连接在一起以创建车道图。该一个或多个控制器将车道图的多个车道段中的每一个分类为一个或多个车道属性,并且重新组合多个车道段以创建道路的表示。该一个或多个控制器基于作为道路一部分的车道的表示来重新创建自动驾驶车辆周围的环境场景。技术研发人员:邹光宇,B·N·R·巴克斯,M·A·洛希,I·帕利特受保护的技术使用者:通用汽车环球科技运作有限责任公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240731/189521.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。