摆振判断方法及装置、存储介质、电子设备与流程
- 国知局
- 2024-07-31 21:29:26
本技术涉及车辆工程领域,尤其是涉及到一种摆振判断方法及装置、存储介质、电子设备。
背景技术:
1、客车作为以运输人员为主要用途的车辆,安全性是其首要的关注要素。客车摆振通常具体指客车在干燥良好的路面上中高速直线行驶时方向盘发生肉眼可及的小幅快速往复摆动。客车摆振的发生一方面会影响驾驶员的驾驶,引起驾驶员的心理恐慌;另一方面过大的摆振幅值在车辆高速行驶时甚至会导致车辆蛇形,严重影响车辆安全。因此,为了确保行驶安全、提升操控性和舒适性,评价客车摆振对于客车制造商、运营商和乘客来说都具有重要的意义。
2、现有的摆振评价方法主要有实验测量方法、数值模拟方法、主观评价方法,然而实验测量方法以及数值模拟方法的操作过程较复杂,而主观评价方法的准确度较低。
技术实现思路
1、有鉴于此,本技术提供了一种摆振判断方法及装置、存储介质和电子设备,解决了现有的摆振判断方法操作复杂、准确度较低的问题。
2、根据本技术的一个方面,提供了一种摆振判断方法,包括:
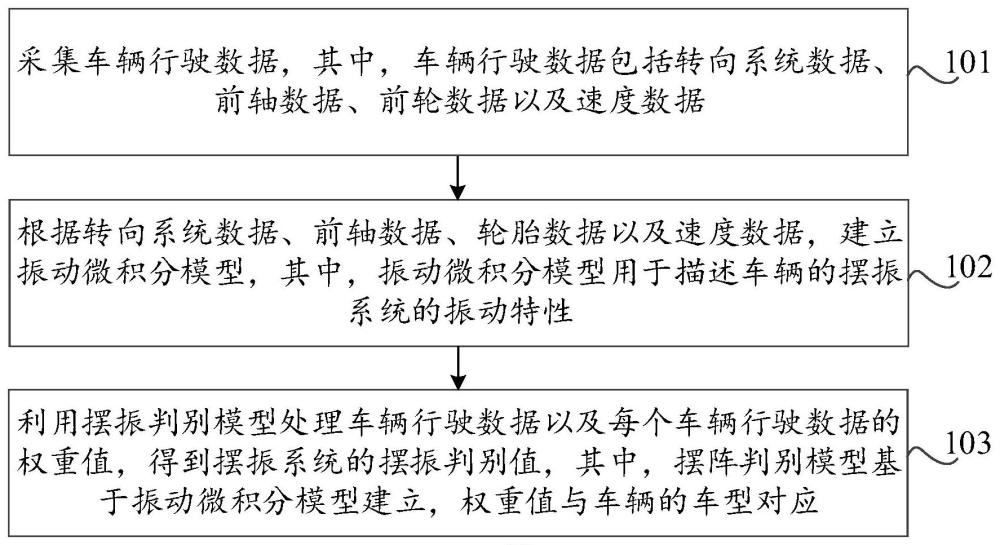
3、采集车辆行驶数据,其中,所述车辆行驶数据包括转向系统数据、前轴数据、前轮数据以及速度数据;
4、根据所述转向系统数据、所述前轴数据、所述轮胎数据以及所述速度数据,建立振动微积分模型,其中,所述振动微积分模型用于描述车辆的摆振系统的振动特性;
5、利用摆振判别模型处理所述车辆行驶数据以及每个车辆行驶数据的权重值,得到所述摆振系统的摆振判别值,其中,所述摆阵判别模型基于所述振动微积分模型建立,所述权重值与所述车辆的车型对应。
6、可选地,所述转向系统数据包括:
7、转向系统的转动惯量、转向系统的阻尼系数、转向系统刚度,以及主销后倾角。
8、可选地,所述前轴数据包括:
9、前轴的阻尼系数以及前轴刚度。
10、可选地,所述轮胎数据包括:
11、轮胎的转动惯量、轮胎绕主销的阻尼系数、轮胎刚度、左轮胎侧向力、右轮胎侧向力、前桥轮端的转动惯量、轮胎滚动半径、轮胎拖距、前轮轮距、轮胎侧向刚度、主销偏置距、滚动系数、轮胎侧倾角。
12、可选地,所述速度数据包括:
13、左右车轮的第一振动加速度、前轴刚性梁上的第二振动加速度、板簧系统的第三振动加速度、转向系统的第四振动加速度,以及车速;
14、所述第一振动加速度由设置在前轮端的第一加速度传感器采集,所述第二振动加速度由设置在前轴刚性梁上的第二加速度传感器采集,所述第三振动加速度由设置在前桥板簧后置座的第三加速度传感器采集,所述第四振动加速度由设置在方向盘外周的的第四加速度传感器采集,所述车速由设置在车轮的转速传感器采集。
15、可选地,在所述根据所述转向系统数据、所述前轴数据、所述轮胎数据以及所述速度数据,建立振动微积分方程之前,所述方法还包括:
16、利用路谱数据采集仪判断是否满足判断前提条件,其中,所示判断前提条件包括路面平直条件以及轮胎气压条件;
17、若满足,则剔除所述车辆行驶数据中的异常数据;
18、若不满足,则生成无法判断摆振的提示信息,并结束摆振判断。
19、可选地,所述方法还包括:
20、获取历史摆振判别值以及与历史摆振判别值对应的专家打分,并根据所述专家打分确定摆振判别值的目标范围,其中,所述目标范围用于评估摆振强度;
21、相应地,在所述得到所述摆振系统的摆振判别值之后,所述方法还包括:
22、若所述摆振判别值属于所述目标范围,则确定所述摆振系统符合预设稳定性要求,否则确定所述摆振系统不符合预设稳定性要求。
23、根据本技术的另一方面,提供了一种摆振判断装置,所述装置包括:
24、采集模块,用于采集车辆行驶数据,其中,所述车辆行驶数据包括转向系统数据、前轴数据、前轮数据以及速度数据;
25、处理模块,用于根据所述转向系统数据、所述前轴数据、所述轮胎数据以及所述速度数据,建立振动微积分模型,其中,所述振动微积分模型用于描述车辆的摆振系统的振动特性;
26、判别模块,用于利用摆振判别模型处理所述车辆行驶数据以及每个车辆行驶数据的权重值,得到所述摆振系统的摆振判别值,其中,所述摆阵判别模型基于所述振动微积分模型建立,所述权重值与所述车辆的车型对应。
27、可选地,所述转向系统数据包括:
28、转向系统的转动惯量、转向系统的阻尼系数、转向系统刚度,以及主销后倾角。
29、可选地,所述前轴数据包括:
30、前轴的阻尼系数以及前轴刚度。
31、可选地,所述轮胎数据包括:
32、轮胎的转动惯量、轮胎绕主销的阻尼系数、轮胎刚度、左轮胎侧向力、右轮胎侧向力、前桥轮端的转动惯量、轮胎滚动半径、轮胎拖距、前轮轮距、轮胎侧向刚度、主销偏置距、滚动系数、轮胎侧倾角。
33、可选地,所述速度数据包括:
34、左右车轮的第一振动加速度、前轴刚性梁上的第二振动加速度、板簧系统的第三振动加速度、转向系统的第四振动加速度,以及车速;
35、所述第一振动加速度由设置在前轮端的第一加速度传感器采集,所述第二振动加速度由设置在前轴刚性梁上的第二加速度传感器采集,所述第三振动加速度由设置在前桥板簧后置座的第三加速度传感器采集,所述第四振动加速度由设置在方向盘外周的的第四加速度传感器采集,所述车速由设置在车轮的转速传感器采集。
36、可选地,所述装置还包括筛选模块,用于:
37、利用路谱数据采集仪判断是否满足判断前提条件,其中,所示判断前提条件包括路面平直条件以及轮胎气压条件;
38、若满足,则剔除所述车辆行驶数据中的异常数据;
39、若不满足,则生成无法判断摆振的提示信息,并结束摆振判断。
40、可选地,所述装置还包括评估模块,用于:
41、获取历史摆振判别值以及与历史摆振判别值对应的专家打分,并根据所述专家打分确定摆振判别值的目标范围,其中,所述目标范围用于评估摆振强度;以及,若所述摆振判别值属于所述目标范围,则确定所述摆振系统符合预设稳定性要求,否则确定所述摆振系统不符合预设稳定性要求。
42、根据本技术又一个方面,提供了一种存储介质,其上存储有程序或指令,所述程序或指令被处理器执行时实现上述摆振判断方法。
43、根据本技术再一个方面,提供了一种电子设备,包括存储介质和处理器,所述存储介质存储有计算机程序,所述处理器执行所述计算机程序时实现上述摆振判断方法。
44、借由上述技术方案,本技术利用传感器采集车辆行驶过程中产生的行驶数据,并对采集到的数据进行筛选,以剔除可能导致误差、影响判断准确度的异常数据。然后根据振动微积分模型以及摆振判别模型,基于筛选出来的数据,从转向提供,前轴以及轮胎三个维度进行分析,结合车型等影响因素计算得到摆振判别值。在此基础上,还可根据历史数据进一步划定摆振系统较稳定时,摆振判别值对应的目标范围,进而根据目标范围评估是否需要对转向系统进行维修或改进。该实施例的判断方法简单,准确度高,有效解决了现有的摆振判断方法操作复杂、准确度较低的问题。
45、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189714.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。