矿山智能巡检装置的制作方法
- 国知局
- 2024-07-31 22:27:46
本发明涉及检测设备,特别是涉及一种矿山智能巡检装置。
背景技术:
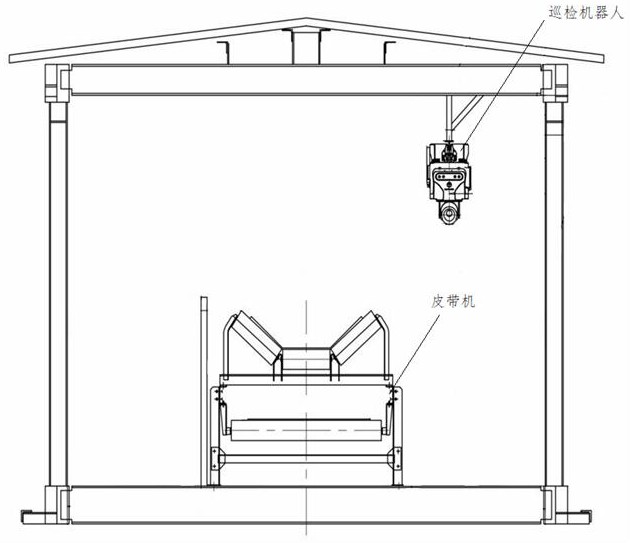
1、矿业生产工艺中物料运输基本都采用皮带机进行输送。皮带机的稳定安全运行是可持续生产中的重中之重。目前皮带机的点检方式为人工点检,点检周期长、频率低且强度大,人工目视化点检和手持仪器点检由于点检频次低容易造成不能及时发现设备隐患和缺陷。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种矿山智能巡检装置。
2、为了解决以上技术问题,本发明的技术方案如下:
3、一种矿山智能巡检装置,包括:
4、巡检轨道,固定设置在皮带机廊道内;
5、巡检机器人,沿所述巡检轨道运行,其包括图像采集模块、热成像采集模块、音频采集模块以及主控模块;
6、所述图像采集模块用于实时采集皮带机廊道内的图像数据,并将其传输至所述主控模块;
7、所述热成像采集模块用于实时采集皮带机廊道内的热成像图像数据,并将其传输至所述主控模块;
8、所述音频采集模块用于实时采集皮带机廊道内的音频数据,并将其传输至所述主控模块;
9、所述主控模块用于接收所述图像采集模块传输的图像数据、所述热成像采集模块传输的热成像图像数据以及所述音频采集模块传输的音频数据,并将所述图像数据、热成像图像数据以及音频数据与样本数据进行对比,形成巡检结果数据。
10、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括报警模块,所述报警模块与所述主控模块连接;
11、当所述主控模块根据巡检结果数据判断皮带机存在故障时,所述主控模块生成报警信号并传输至所述报警模块,所述报警模块响应报警信号并进行报警。
12、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述报警模块包括声光报警器。
13、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括数据存储模块,所述数据存储模块用于接收所述主控模块传输的数据,并将数据根据采集时间进行存储。
14、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括通讯模块,所述主控模块通过所述通讯模块与上位机进行数据传输。
15、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括烟雾采集模块,所述烟雾采集模块用于实时采集皮带机廊道内的烟雾信号。
16、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括自清洁模块,所述自清洁模块用于对所述巡检轨道和所述图像采集模块进行自清洁。
17、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述自清洁模块包括气泵以及与气泵连接的喷嘴,所述喷嘴朝向所述巡检轨道和所述图像采集模块。
18、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述巡检机器人还包括定位模块,所述定位模块用于对所述巡检机器人的所在位置进行实时定位。
19、作为本发明所述矿山智能巡检装置的一种优选方案,其中:所述定位模块包括gps定位模块。
20、本发明的有益效果是:
21、本发明实现了自动化巡检,大大减少了操作人员在皮带机运行时的点检次数,节约了人力成本,弥补了现有点检手段的不足。同时,极大地改善了点检质量,可通过对皮带机的数据进行实时分析来稳定生产工艺,保证设备安全运行,提高了人力资源的利用率。
技术特征:1.一种矿山智能巡检装置,其特征在于:包括:
2.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括报警模块,所述报警模块与所述主控模块连接;
3.根据权利要求2所述的矿山智能巡检装置,其特征在于:所述报警模块包括声光报警器。
4.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括数据存储模块,所述数据存储模块用于接收所述主控模块传输的数据,并将数据根据采集时间进行存储。
5.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括通讯模块,所述主控模块通过所述通讯模块与上位机进行数据传输。
6.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括烟雾采集模块,所述烟雾采集模块用于实时采集皮带机廊道内的烟雾信号。
7.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括自清洁模块,所述自清洁模块用于对所述巡检轨道和所述图像采集模块进行自清洁。
8.根据权利要求7所述的矿山智能巡检装置,其特征在于:所述自清洁模块包括气泵以及与气泵连接的喷嘴,所述喷嘴朝向所述巡检轨道和所述图像采集模块。
9.根据权利要求1所述的矿山智能巡检装置,其特征在于:所述巡检机器人还包括定位模块,所述定位模块用于对所述巡检机器人的所在位置进行实时定位。
10.根据权利要求9所述的矿山智能巡检装置,其特征在于:所述定位模块包括gps定位模块。
技术总结本发明公开了一种矿山智能巡检装置,涉及检测设备技术领域,包括巡检轨道,固定设置在皮带机廊道内;巡检机器人,沿所述巡检轨道运行,其包括图像采集模块、热成像采集模块、音频采集模块以及主控模块;所述图像采集模块用于实时采集皮带机廊道内的图像数据;所述热成像采集模块用于实时采集皮带机廊道内的热成像图像数据;所述音频采集模块用于实时采集皮带机廊道内的音频数据;所述主控模块用于接收图像数据、热成像图像数据以及音频数据,并形成巡检结果数据。本发明实现了自动化巡检,大大减少了操作人员在皮带机运行时的点检次数,节约了人力成本,弥补了现有点检手段的不足。技术研发人员:张建伟,范广瑞,于战武受保护的技术使用者:安徽金安矿业有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240731/193501.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表