工业用安全锁远程控制方法、装置、存储介质及电子设备与流程
- 国知局
- 2024-07-31 22:27:39
本技术涉及工业用安全锁,具体涉及一种工业用安全锁远程控制方法、装置、存储介质及电子设备。
背景技术:
1、随着工业领域的快速发展,工业用安全锁的相关技术在不断进步,相应地,工业用安全锁在保障设备安全和防止未经授权的访问方面发挥着越来越重要的作用。其中,工业用安全锁是一种应用于工业环境中的锁具,主要是在工业生产过程中,设置在工业设备上,通过限制工业设备的启动、停止等方式,防止人员对工业设备进行误操作或未经授权的操作,从而预防事故的发生,保证人员和工业设备的安全。
2、目前,当人员需要对工业设备进行操作时,需要对人员的身份信息进行验证,验证通过后,工业用安全锁才会被打开。如果检测到未经授权的访问或者非法开启工业用安全锁时,工业用安全锁会发出报警信息。但是由于工业设备所处的环境较为复杂,本工业设备或者其它工业设备所产生机械振动会成为工业用安全锁控制方面的干扰因素,容易将产生的机械振动误判为非法开启工业用安全锁,导致工业用安全锁出现误报警的情况。
技术实现思路
1、为了避免工业用安全锁出现误报警的情况,本技术提供一种工业用安全锁远程控制方法、装置、存储介质及电子设备。
2、在本技术的第一方面提供了一种工业用安全锁远程控制方法,具体包括:
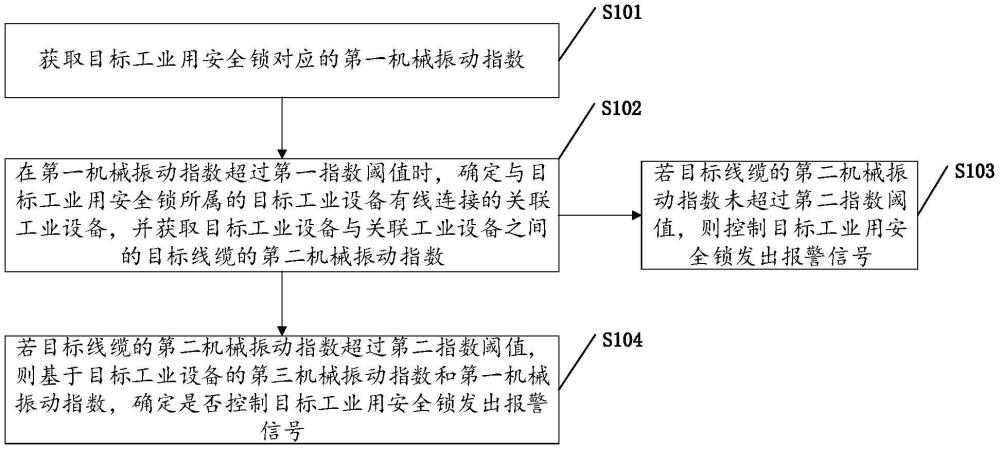
3、获取目标工业用安全锁对应的第一机械振动指数;
4、在所述第一机械振动指数超过第一指数阈值时,确定与所述目标工业用安全锁所属的目标工业设备有线连接的关联工业设备,并获取所述目标工业设备与所述关联工业设备之间的目标线缆的第二机械振动指数;
5、若所述目标线缆的第二机械振动指数未超过第二指数阈值,则控制所述目标工业用安全锁发出报警信号;
6、若所述目标线缆的第二机械振动指数超过所述第二指数阈值,则基于所述目标工业设备的第三机械振动指数和所述第一机械振动指数,确定是否控制所述目标工业用安全锁发出报警信号。
7、通过采用上述技术方案,如果第一机械振动指数超过第一指数阈值,说明当前目标工业用安全锁发生异常振动,那么将目标线缆的第二机械振动指数与第二指数阈值进行对比,如果未超过第二指数阈值,说明当前目标工业设备和关联工业设备自身均未主动发生异常振动,那么在目标工业设备上的目标工业用安全锁发生异常振动的情况下,进一步地确定目标工业用安全锁的异常振动并非受到目标工业设备的异常振动的影响而产生,而是目标工业用安全锁受到外力影响所产生,进而排除目标工业设备机械振动的干扰,可以确定当前目标工业用安全锁正在被人员非法开启,工业用安全锁发出报警信号;如果超过第二指数阈值,目标工业设备和关联工业设备中存在自身主动产生异常振动的情况,说明目标工业用安全锁的异常振动可能是外界非法开启导致和/或目标工业设备机械振动干扰导致,那么根据目标工业设备和目标工业用安全锁的机械振动指数,进一步甄别目标工业用安全锁的异常振动的原因,最终确定目标工业用安全锁是否进行报警,避免工业用安全锁出现误报警的情况。
8、可选的,所述基于所述目标工业设备的第三机械振动指数和所述第一机械振动指数,确定是否控制所述目标工业用安全锁发出报警信号,包括:
9、判断所述目标工业设备的第三机械振动指数是否超过第三指数阈值;
10、若所述第三机械振动指数超过所述第三指数阈值,则基于所述第三机械振动指数,确定所述目标工业用安全锁对应的第一标准传导振动曲线,所述第一标准传导振动曲线为所述目标工业设备传导机械振动至所述目标工业用安全锁时,所述目标工业用安全锁的机械振动的标准模拟曲线;
11、根据所述第一机械振动指数,确定对应的第一实际传导振动曲线,并将所述第一标准传导振动曲线与所述第一实际传导振动曲线进行拟合,得到第一拟合率;
12、在所述第一拟合率超过拟合率阈值情况下,则不控制所述目标工业用安全锁发出报警信号,在所述第一拟合率未超过拟合率阈值情况下,则控制所述目标工业用安全锁发出报警信号;
13、若第三机械振动指数未超过所述第三指数阈值,则控制所述目标工业用安全锁发出报警信号。
14、通过采用上述技术方案,如果第一拟合率超过拟合率阈值,说明第一标准传导振动曲线与第一实际传导振动曲线较为相似,进而说明目标工业用安全锁的异常振动仅由目标工业设备的机械振动干扰所致,并不存在外界非法开启的情况,那么此时服务器不向目标工业用安全锁发送报警的控制信号,避免出现误报警情况。如果第一拟合率未超过拟合率阈值,说明目标工业用安全锁的异常振动可能由目标工业设备的机械振动和外界非法开启共同导致,那么服务器发送控制信号,控制目标工业用安全锁发出报警信号。
15、可选的,所述方法还包括:
16、在所述目标线缆的第二机械振动指数超过所述第二指数阈值时,基于所述第二机械振动指数,确定所述目标线缆对应的第二实际传导振动曲线;
17、将所述第二实际传导振动曲线与所述目标线缆对应的第二标准传导振动曲线进行拟合,得到第二拟合率,所述第二标准传导振动曲线为所述目标工业设备与所述关联工业设备中振动源一方振动传导至非振动源另一方的机械振动的标准模拟曲线;
18、若所述第二拟合率超过拟合率阈值,则确定所述目标工业设备与所述关联工业设备中机械振动指数最大的振动源设备,并判断当前是否存在所述振动源设备对应的外界诱导事件,所述外界诱导事件为诱导所述振动源设备异常振动的外界影响因子;
19、若不存在,则确定所述振动源设备存在故障并向用户终端发送检修提醒。
20、通过采用上述技术方案,如果第二拟合率超过拟合率阈值,说明此第二实际传导振动曲线为振动源一方振动传导至非振动源一方情况下,目标线缆实际的振动曲线,那么在当前不存在振动源设备对应的外界诱导事件时,此振动源设备的异常过大振动,是由于设备自身发生故障所导致,而非受到外界诱导事件影响的偶然性振动,那么向用户终端发送检修提醒,以对此振动源设备进行及时维修。从而通过目标线缆的第二机械振动指数,准确地锁定故障设备。
21、可选的,所述方法还包括:
22、在所述第一机械振动指数未超过第一指数阈值时,确定所述目标工业设备出现异常振动的第一外界诱导事件,并确定所述关联工业设备出现异常振动的第二外界诱导事件;
23、若出现所述第一外界诱导事件和/或所述第二外界诱导事件,则延长所述第一机械振动指数的持续获取时长;
24、若所述第一外界诱导事件和所述第二外界诱导事件均未出现,则在预设时间内,所述目标工业设备和所述关联工业设备的异常振动故障维修频次均低于频次阈值时,增大下次获取所述第一机械振动指数的间隔时间。
25、通过采用上述技术方案,如果当前出现了第一外界诱导事件和/或第二外界诱导事件,说明据此可能会导致目标工业设备和/或关联工业设备后续发生异常振动,进而对目标工业用安全锁产生干扰,出现非法开启情况的误判,那么延长对此目标工业用安全锁的第一机械振动指数的持续获取时长,避免后续出现误报警情况;如果目标工业设备和关联工业设备的异常振动故障维修频次均低于频次阈值,说明两设备因自身故障导致的异常振动情况较少,误报警概率较低,那么可以适当增加间隔时间,从而实现对目标工业用安全锁误报警的合理规避。
26、可选的,所述目标工业用安全锁内置有震动式发电电池,所述方法还包括:
27、确定正常振动情况下所述目标工业设备的易振时段和易出现振动指数,所述易振时段为所述目标工业设备易于发生振动的时间段,所述易出现振动指数为所述目标工业设备发生振动时易于产生的机械振动指数;
28、基于所述易振时段和所述易出现振动指数,确定当前时间所述震动式发电电池对应的充电档位,充电档位越大,充电效率越高。
29、通过采用上述技术方案,基于目标工业设备的易振时段和易出现振动指数,可以较为准确地确定当前时间最容易出现的机械振动指数,进而可以确定当前时间下目标工业设备一旦发生振动,最有可能的振动程度,最终据此确定当前时间下震动式发电电池对应的充电档位,实现最大程度地利用振动进行电池的高效充电。
30、可选的,所述确定正常振动情况下所述目标工业设备的易振时段和易出现振动指数,具体包括:
31、获取所述目标工业设备的历史振动指数和历史振动时段;
32、统计各所述历史振动指数的第一出现次数,按照所述第一出现次数从大到小的顺序,从各所述历史振动指数中选取第一个数的历史振动指数确定为易出现振动指数;
33、统计各所述历史振动时段内单个易出现振动指数的第二出现次数,按照所述第二出现次数从大到小的顺序,从各所述历史振动时段内选取第二个数的历史振动时段确定为所述单个易出现振动指数对应的易振时段。
34、通过采用上述技术方案,第一出现次数越大,说明对应的历史振动指数在目标工业设备发生振动时越容易出现,并按照第一出现次数从大到小的顺序,从各个历史振动指数中筛选第一个数的历史振动指数并均确定为易出现振动指数。另外,第二出现次数越大,对应的历史振动时段内目标工业设备振动时越容易出现此单个易出现振动指数,并按照第二出现次数从大到小的顺序,从各个历史振动时段中筛选第二个数的历史振动时段并均确定为此单个易出现振动指数对应的易振时段。从而方便后续更为合理地确定震动式发电电池对应的充电档位。
35、可选的,所述基于所述易振时段和所述易出现振动指数,确定当前时间所述震动式发电电池对应的充电档位,具体包括:
36、计算每个所述易出现振动指数的第一权重,所述第一权重为每个易出现振动指数的第一出现次数与所有易出现振动指数的第一出现次数之和的比值;
37、计算同一易出现振动指数的各易振时段的第二权重,所述第二权重为同一易出现振动指数在对应的每个易振时段内的第二出现次数与在对应的所有易振时段内的第二出现次数之和的比值;
38、将当前时间所处的易振时段确定为目标时段,计算每个所述易出现振动指数的第一权重与对应的目标时段的第二权重的乘积;
39、根据各所述乘积中的最大乘积对应的易出现振动指数,确定当前时间所述震动式发电电池对应的充电档位。
40、通过采用上述技术方案,从各个乘积中选取出最大乘积,即可确定在当前时间下,如果目标工业用安全锁发生振动时,产生的振动指数越容易为最大乘积对应的易出现振动指数。最终根据最大乘积对应的易出现振动指数,确定震动式发电电池对应的充电档位,最大乘积对应的易出现振动指数越大,振动程度越大,充电档位越大,充电效率越高,从而最大程度地利用振动进行电池的高效充电。
41、在本技术的第二方面提供了一种工业用安全锁远程控制装置,具体包括:
42、指数获取模块,用于获取目标工业用安全锁对应的第一机械振动指数;
43、设备确定模块,用于在所述第一机械振动指数超过第一指数阈值时,确定与所述目标工业用安全锁所属的目标工业设备有线连接的关联工业设备,并获取所述目标工业设备与所述关联工业设备之间的目标线缆的第二机械振动指数;
44、第一预警模块,用于若所述目标线缆的第二机械振动指数未超过第二指数阈值,则控制所述目标工业用安全锁发出报警信号;
45、第二预警模块,用于若所述目标线缆的第二机械振动指数超过所述第二指数阈值,则基于所述目标工业设备的第三机械振动指数和所述第一机械振动指数,确定是否控制所述目标工业用安全锁发出报警信号。
46、通过采用上述技术方案,指数获取模块获取到目标工业用安全锁对应的第一机械振动指数,由设备确定模块确定目标工业设备有线连接的关联工业设备,并获取目标线缆的第二机械振动指数,接着第一预警模块在第二机械振动指数未超过第二指数阈值时,控制目标工业用安全锁发出报警信号,最后第二预警模块在第二机械振动指数超过第二指数阈值时,进一步确定是否控制目标工业用安全锁发出报警信号。
47、在本技术的第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,当所述计算机程序被处理器加载并执行时,执行如第一方面中任意一项所述的方法步骤。
48、在本技术的第四方面提供了一种电子设备,具体包括:
49、处理器、存储器及存储在存储器中并能够在处理器上运行的计算机程序,所述处理器用于加载并执行所述存储器中存储的计算机程序,以使所述电子设备执行如第一方面中任意一项所述的方法。
50、综上所述,本技术包括以下至少一种有益技术效果:如果第一机械振动指数超过第一指数阈值,说明当前目标工业用安全锁发生异常振动,那么将目标线缆的第二机械振动指数与第二指数阈值进行对比,如果未超过第二指数阈值,说明当前目标工业设备和关联工业设备自身均未主动发生异常振动,进一步地确定目标工业用安全锁的异常振动是受到外力影响所产生,进而排除目标工业设备机械振动的干扰,可以确定当前目标工业用安全锁正在被人员非法开启,工业用安全锁发出报警信号;如果超过第二指数阈值,目标工业设备和关联工业设备中存在自身主动产生异常振动的情况,说明目标工业用安全锁的异常振动可能是外界非法开启导致和/或目标工业设备机械振动干扰导致,那么根据目标工业设备和目标工业用安全锁的机械振动指数,进一步甄别目标工业用安全锁的异常振动的原因,最终确定目标工业用安全锁是否进行报警,避免工业用安全锁出现误报警的情况。
本文地址:https://www.jishuxx.com/zhuanli/20240731/193493.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表