一种连接机器人的黑匣子及其形成的工业机器人的制作方法
- 国知局
- 2024-07-31 21:38:31
本发明涉及机器人故障分析的,尤其涉及一种连接机器人的黑匣子及其形成的工业机器人。
背景技术:
1、工业机器人应用日益广泛,其发挥的作用也越来越重要,如机器人搬运、焊接等。而工业机器人在作业过程中难免会出现故障,且由于缺少对机器人发生故障前的运行数据的记录,技术人员很难复原机器人发生故障前的运行状态,排查出现故障的原因。
2、黑匣子通常指飞行数据记录仪,或飞行信息记录系统。黑匣子可以用来记录飞机在飞行过程中的各种参数,如飞行的时间、速度、高度、发动机的转速及温度等,以及驾驶员与乘务人员和各个塔台之间的对话等。当飞机发生故障或事故时,找到黑匣子,从中读出记录的各种数据,能够帮助技术人员分析飞机出现的故障或失事的原因。随着科学技术的发展和完善,黑匣子技术也不再局限于飞机领域,而是被广泛应用到各个领域,如火箭、潜艇、轮船、汽车等,用于记录各种对象在运行过程中的各项性能参数。
3、现有专利cn116486511a公开了一种基于iros的机器人黑匣子装置,黑匣子由微型电脑、锂电池、安装于黑匣子上的温度传感器和震动传感器、插装于微型电脑中的存储卡及设置于微型电脑上的网络单元构成,通过将黑匣子安装到安装有智能机器人操作系统iros的机器人上,当该机器人出现意外时可以通过黑匣子对机器人进行故障或事故原因分析。其中,该专利技术方案中黑匣子内部温度传感器和震动传感器可以独立探测记录机器人的环境变化,在后续数据分析的时候可以还原机器人当时的温度和震动情况,但是没有办法还原机器人在故障发生之前的位置和姿态信息。由于工业机器人包含多个关节,在故障分析的时候,需要还原工业机器人在故障前的运行状态,即各个关节的位置和姿态,才能快捷进行故障原因排查。
技术实现思路
1、为克服相关技术中存在的问题,本发明的目的之一是提供一种连接机器人的黑匣子,能够存储机器人中各个关节在不同时刻对应的位置信息,便于在机器人故障之后还原机器人的运行状态,进行故障原因排查。
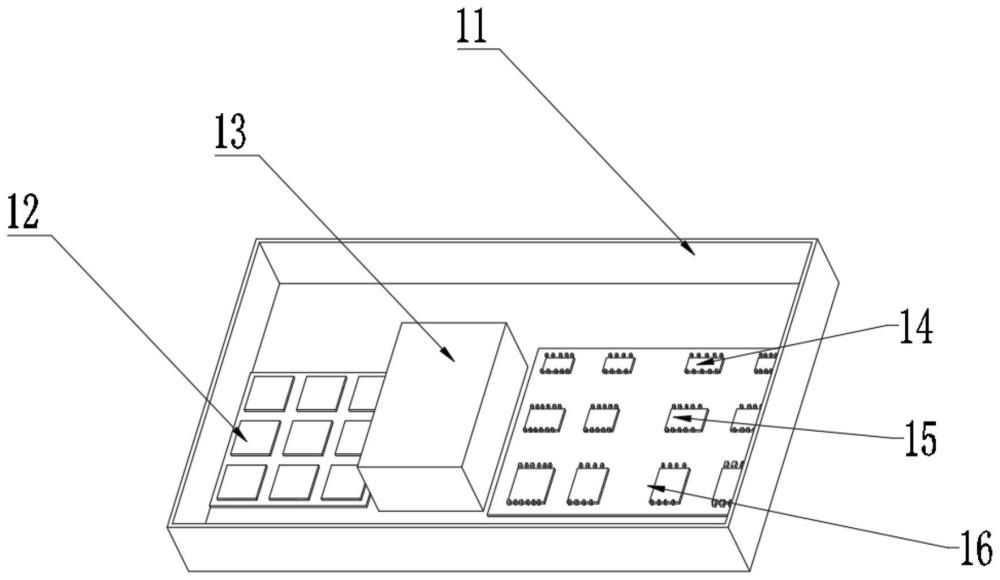
2、一种连接机器人的黑匣子,机器人包括控制器和至少一个关节;黑匣子包括外壳,所述外壳内部设置有传输电路和存储芯片,所述存储芯片通过传输电路与所述控制器通讯连接,所述存储芯片用于存储控制器中各个关节在不同时刻对应的位置信息。
3、本技术中控制器中的位置信息通过传输电路传输至存储芯片中进行存储。当机器人发生故障的时候,本技术可以从存储芯片中调取机器人故障之前一段时间各个关节的位置信息,还原机器人在故障之前的运行状态,排查故障原因,降低安全风险。
4、在本发明较佳的技术方案中,所述存储芯片为闪存。
5、闪存是一种电子式可清除程序化只读存储器的形式,允许在操作中被多次擦或写的存储器。闪存作为一种非易失性存储器,即使在断电的情况下仍能保持所存储的数据信息,具有使用方便、便于携带、容量较大、安全可靠等的特点,非常适合用于存储工业机器人的姿态及位置等相关数据。除此以外,闪存是非易失性的内存。这表示单就保存数据而言,它是不需要消耗电力的。与硬盘相比,闪存也有更佳的动态抗震性。闪存还有一项特性:当它被制成储存卡时非常可靠;即使浸在水中也足以抵抗高压与极端的温度。即使机器人发生故障时产生高温高压环境等,黑匣子内部的闪存具有抵抗高压与极端的温度的优势,可以很好地进行数据保存。
6、在本发明较佳的技术方案中,所述外壳内部还设置有电池和供电电路,所述电池通过供电电路连接所述存储芯片。
7、本技术中供电电路可以为导线,导线的两端通过接口连接电池和存储芯片。这里的存储芯片为需要供电的存储芯片。通过电池和供电电路对存储芯片进行供电,可以扩大存储芯片可选择的范围。电池和供电电路的存在,可以确保存储芯片始终保持电连接状态,即使机器人出现故障断电,电池也可以实现对存储芯片的稳定供电,避免存储芯片因为突然断电出现数据丢失等情况。
8、在本发明较佳的技术方案中,所述外壳内部还设置有充电电路,所述电池通过充电电路连接外部电源。
9、这里的外部电源指的是黑匣子外部的电源,外部电源可以是与机器人所连接的相同的外部电源,也可以是独立的外部电源。当机器人出现故障的时候,外部电源仍然可以对电池进行充电。若是机器人故障损坏了与其连接的外部电源,即外部电源不再对电池进行充电,此时电池本身存在的电量也可以继续为存储芯片提供电能,实现对存储芯片的稳定供电,避免存储芯片因为突然断电出现数据丢失等情况。
10、在本发明较佳的技术方案中,所述机器人还包括传感器,所述传感器与所述控制器通讯连接,所述传感器用于实时监测各个关节对应的位置信息,并将位置信息传输至控制器中。
11、本技术中控制器可以为现有的机器人控制器,控制器能够接受指令,并对指令进行加载分析和计算,并控制机器人中各个关节移动至指定位置处。在控制器控制各个关节移动过程中,每个关节中均设置有一个传感器,该传感器为位置传感器,可以实时监测对应的关节相对于坐标原点的坐标。各个关节在控制器的控制下移动至设定位置处,传感器实时监测对应关节的位置信息,并将位置信息传输至控制器进行校对;传输至控制器的位置信息通过传输电路存储至黑匣子的存储芯片中,这样可以实现对机器人各个关节位置信息的额外保存,便于在各种突发情况下及时调取位置信息以还原机器人的运行状态。
12、在本发明较佳的技术方案中,所述传感器的个数为m+1个,m为关节的个数,其中一个传感器位于机器人的末端执行器中,其余m个传感器分别位于各个关节处。
13、机器人的末端执行器位于最后一个关节的末端,末端执行器可以为夹具等执行装置,本技术通过获得各个关节的位置信息,以及末端执行器的位置信息,可以还原出机器人末端执行器的姿态和位置信息,末端执行器的姿态可以由机器人中各个关节的位置信息以及末端执行器的位置信息获得。
14、在本发明较佳的技术方案中,所述机器人还包括执行器,所述控制器与执行器通讯连接,所述执行器与所述各个关节通讯连接;所述控制器所接收到的指令经过计算转换为各个关节的位置信息,所述控制器将位置信息传输至所述执行器。
15、本技术中控制器可以为现有的机器人控制器,控制器能够接受指令,并对指令进行加载分析和计算,得出各个关节的在该指令下对应的目标位置,并将该目标位置传输至执行器中。执行器负责控制各个关节对应驱动装置运行,使得关节运行至目标位置。控制器向执行器发送位置信息的同时,也将位置信息通过传输电路传输至黑匣子的存储芯片中。这样可以实现对机器人各个关节位置信息的额外保存,便于在各种突发情况下及时调取位置信息以还原机器人的运行状态。
16、在本发明较佳的技术方案中,所述传输电路包括数据解析器。
17、本发明的目的之二是提供一种工业机器人,包括如上所述的一种连接机器人的黑匣子。
18、工业机器人各个关节的位置信息会被存储在黑匣子的存储芯片中,当机器人发生故障的时候,通过存储芯片中的位置信息可以原机器人在故障之前的运行状态,排查故障原因,降低安全风险。
19、本发明的有益效果为:
20、本发明提供的一种黑匣子,安装在机器人中,机器人可以为工业机器人,包括控制器和至少一个关节;黑匣子包括外壳,外壳内部设置有传输电路和存储芯片,所述存储芯片通过传输电路与所述控制器通讯连接,所述存储芯片用于存储控制器中各个关节在不同时刻对应的位置信息;本技术中控制器中的位置信息通过传输电路传输至存储芯片中进行存储。当机器人发生故障的时候,本技术可以从存储芯片中调取机器人故障之前一段时间各个关节的位置信息,还原机器人在故障之前的运行状态,排查故障原因,降低安全风险。
21、本发明还提供了包括上述黑匣子的工业机器人,工业机器人各个关节的位置信息会被存储在黑匣子的存储芯片中,当机器人发生故障的时候,通过存储芯片中的位置信息可以原机器人在故障之前的运行状态,排查故障原因,降低安全风险。
本文地址:https://www.jishuxx.com/zhuanli/20240731/190416.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表