一种基于多模型滤波的捷联导引头刻度尺误差计算方法与流程
- 国知局
- 2024-08-02 13:33:52
本发明涉及制导控制系统设计领域,特别涉及一种捷联导引头刻度尺误差计算方法,尤其是一种基于多模型滤波的捷联导引头刻度尺误差计算方法。
背景技术:
1、随着市场上种类繁多的近程空地制导武器的出现,为降低其使用成本,使用捷联导引头替代平台导引头成为降低制导武器成本的最直接的方式。
2、捷联导引头因缺少框架平台和惯性器件,虽有效降低制造成本,但却无法给出惯性系下的视线角速度信息,需通过弹载惯导系统信息间接计算得出。这将引入导引头的刻度尺误差,使得导引头和惯导系统存在隔离度问题,导致惯性系下的视线角速度信息计算出现误差,从而对制导控制产生不利影响。
技术实现思路
1、本公开针对近程制导武器,提供一种基于多模型滤波的捷联导引头刻度尺误差计算方法,用以消除导引头和惯导系统的刻度尺差异,消除对制导控制的不利影响,提高制导控制精度。
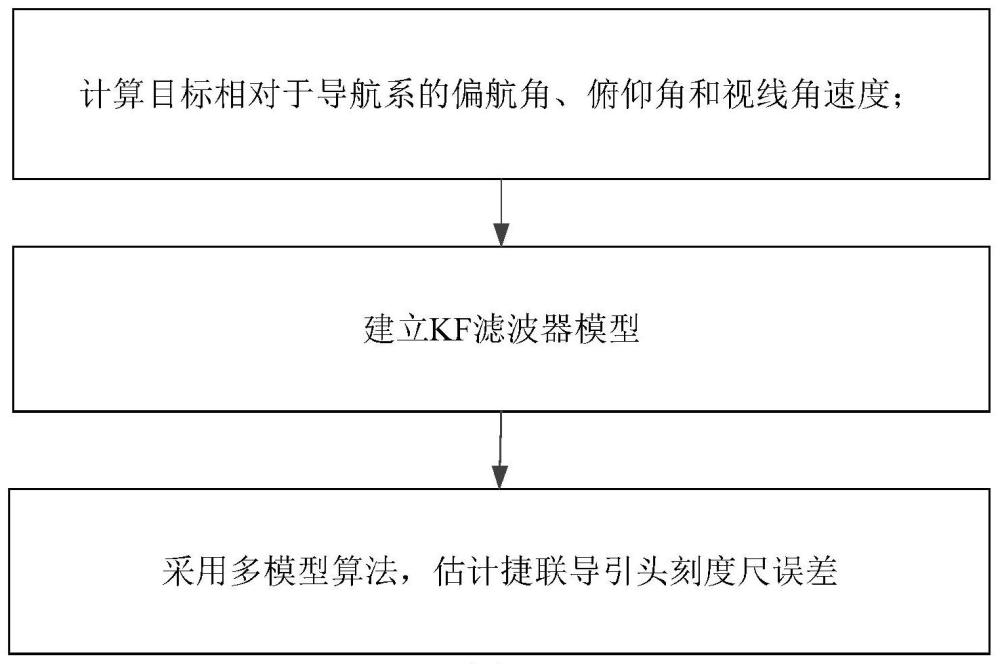
2、本公开提供的基于多模型滤波的捷联导引头刻度尺误差计算方法,步骤如下:
3、s1,计算目标相对于导航系的偏航角、俯仰角和视线角速度;
4、s2,设捷联导引头刻度尺误差为rd,以目标相对导航坐标系的真实偏航角、真实俯仰角、真实偏航角速度、真实俯仰角速度、计算偏航角速度、计算俯仰角速度为状态量,目标相对导航系的计算偏航角、计算俯仰角、计算偏航角速度、计算俯仰角速度为观测量,构造5组不同rd值的kf滤波器模型;
5、s3,采用卡尔曼滤波方程和多模型算法,得到每个kf滤波器的条件概率,进而估计出捷联导引头刻度尺误差
6、进一步的,步骤s1的计算方法包括:
7、s11,将捷联导引头输出的目标角度与弹体纵向横切面的夹角和纵向竖切面的夹角,转换为弹体系下的偏航角和俯仰角;
8、s12,再根据弹载惯性导航系统测量出的弹体姿态,计算得到目标相对于导航坐标系的转移矩阵;
9、s13,进而计算出目标相对于导航系的偏航角、俯仰角和视线角速度。
10、进一步的,步骤s2中,以目标相对导航系的真实偏航角bsn、真实俯仰角esn、真实偏航角速度ωf(2)、真实俯仰角速度ωf(3)、计算偏航角速度计算俯仰角速度为状态量,目标相对导航系的计算偏航角计算俯仰角计算偏航角速度计算俯仰角速度为观测量,构造5组不同rd值的kf滤波器,kf滤波器模型为:
11、设为状态量,可得到如下离散化状态空间方程和观测方程:
12、
13、
14、进一步的,步骤s3中,使用5组kf滤波器的一步预测xk,k-1(i)、观测阵h(i)、观测量zk、一步预测均方误差pk,k-1(i)、量测噪声误差r,得到每个kf滤波器的的条件概率ap(i,k),估计出捷联导引头刻度尺误差为:
15、
16、其中rdi为第i个滤波器选取的rd。
17、与现有技术相比,本公开的有益效果是:(1)通过多模型滤波算法,估计出捷联导引头的刻度尺误差,进而解决捷联导引头和弹载惯导系统的隔离度问题;(2)通过解决刻度尺误差,消除隔离度对制导控制的不利影响,提高低成本化小型制导武器末制导精度;(3)使用了多模型滤波,可以适应更宽范围的刻度尺误差波动。
技术特征:1.一种基于多模型滤波的捷联导引头刻度尺误差计算方法,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述步骤s1的计算方法包括:
3.根据权利要求1或2所述的方法,其特征在于,所述步骤s1具体包括:
4.根据权利要求3所述的方法,其特征在于,所述步骤s2具体包括:
5.根据权利要求4所述的方法,其特征在于,所述步骤s22中,状态参数初始化为:
6.根据权利要求4或5所述的方法,其特征在于,所述步骤s3包括:
技术总结一种基于多模型滤波的捷联导引头刻度尺误差计算方法,主要步骤包括:计算目标相对于导航系的偏航角、俯仰角和视线角速度;建立KF滤波器模型;采用多模型算法,估计捷联导引头刻度尺误差。该方法可通过估计捷联导引头刻度尺误差,消除捷联导引头和弹载惯导系统的隔离度问题,能够有效提高制导控制精度。技术研发人员:刘星宇,袁莉,李书成,刘申娟,白凤祥,王文聪,李怀念,刘启阳受保护的技术使用者:陕西中天火箭技术股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240801/240021.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种柔性可降解的导电皮革
下一篇
返回列表