一种分布式传感器的时间同步方法与流程
- 国知局
- 2024-08-02 13:49:15
本技术涉及传感器通信,更具体地说,涉及一种分布式传感器的时间同步方法。
背景技术:
1、电缆隧道建设在地下5~20m,给人力巡检带来巨大的困难。随着自动监测技术的发展,以及无线传感器领域的技术,在隧道监控领域急需引入分布式传感器,实时采集隧道物理信息,确保为用户提供可靠的供电服务,在隧道传感器加点、入网过程中,首先需要完成传感器的时间同步,即将该传感器的本地时间与网络时间统一,由于电缆隧道在地下空间,传感器网络属于私有局域无线网络,网络中的时间一般由人工选定,由于不可避免的传感器故障以及系统故障,导致整个传感器网络时间不可避免的出现偶然中断,甚至错误,影响整个系统的可靠运行。
2、针对上述问题,公告号为cn113218435b的发明专利公开了一种多传感器时钟同步方法。对多传感器的时间误差进行补偿,将时间同步到相同的基准时标下,得到同一基准时标下的多传感器;对同一基准时标下的多传感器的硬件和软件分别进行硬同步和软同步,得到硬件同步和软件同步的多传感器,即得到同步后的多传感器,其中,进行硬同步的方法为全局时间同步算法、本地时间同步算法以及多传感器联合外参标定算法。本发明的多传感器时间同步方法通过对因各传感器时钟精度不同形成的时间偏差进行研究,从硬件和软件两方面对时间误差进行补偿,将时间同步到统一基准时标下,实现了基于多源传感器的硬同步和软同步。可知,现有技术中有关时间同步的实现方案主要是基于硬件和脉冲信号等方式实现,然而这种方案在后续传感器越来越多的情况下,实时性和准确性难以保证。
3、本技术即是在这种技术应用背景之下,针对电缆隧道传感器网络的实际时间同需求,设计了一种分布式传感器时间同步方法。
技术实现思路
1、有鉴于此,本技术提供了一种分布式传感器的时间同步方法,以解决电缆隧道中传感器网络的可靠时间同步问题,提高时间同步的鲁棒性。
2、本技术提供的技术方案如下:
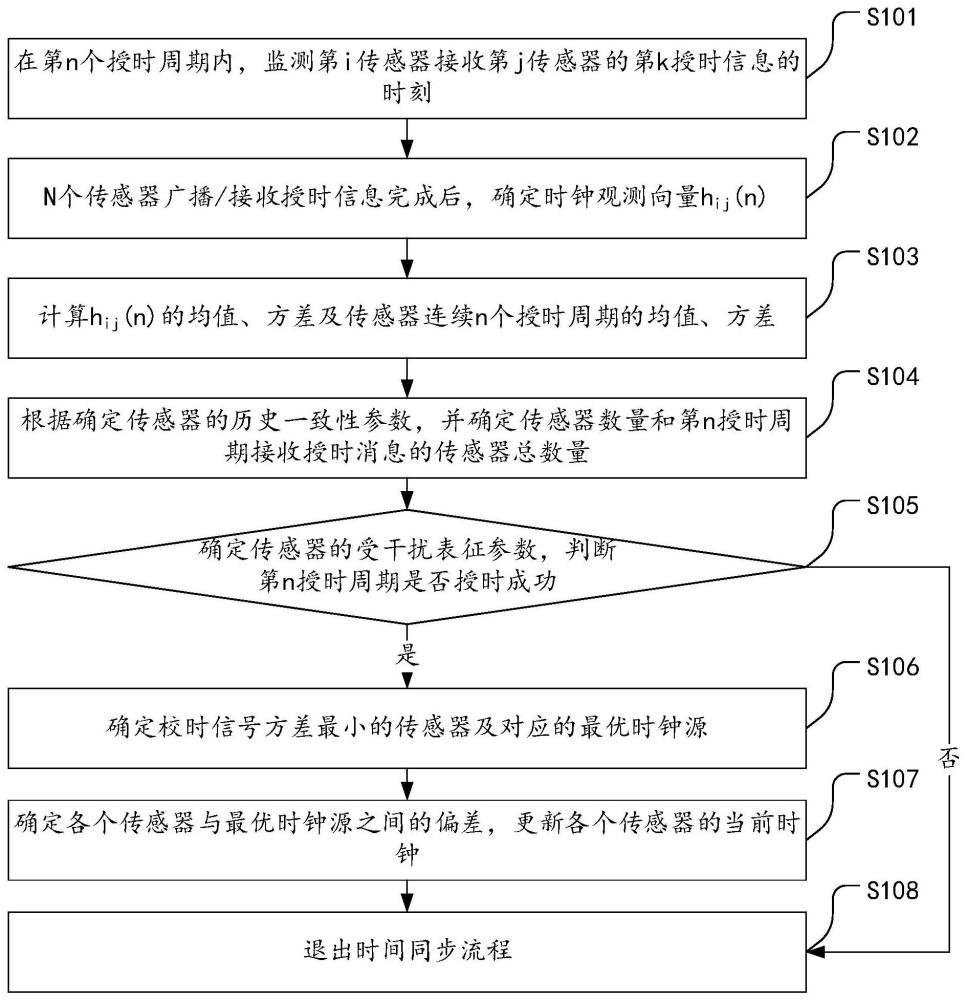
3、一种分布式传感器的时间同步方法,应用于时间同步系统,配置有n个传感器,方法包括:在第n个授时周期内,监测第i传感器接收第j传感器的第k授时信息的时刻bk(n);n个传感器广播/接收授时信息完成后,确定时钟观测向量hij(n),hij(n)包括bk+1(n)与bk(n)之间的时间差;计算hij(n)的均值eij(n)及传感器连续n个授时周期的均值eijn、方差σijn;根据eij(n)、eijn、σijn确定传感器的历史一致性参数p(n),并确定n个传感器中满足p(n)<3的传感器数量ln和第n授时周期接收授时消息的传感器总数量nn;根据ln和nn,确定传感器的受干扰表征参数,判断第n授时周期是否授时成功;若是,则在ln个传感器中确定校时信号方差最小的传感器及对应的最优时钟源qin;确定各个传感器与最优时钟源qin之间的偏差,更新各个传感器的当前时钟。
4、其中一种可能的实现方式中,第n个授时周期内,各个传感器广播/接收的授时信息数量为m+1条,第j传感器按照预设传输时隙向第i传感器依次广播m+1条授时信息。
5、其中一种可能的实现方式中,第i传感器接收到第j传感器发送的m+1条授时信息后,向第j传感器发送反馈信息;第j传感器广播授时信息完成后,所述方法还包括:
6、获取第i传感器向第j传感器发送所述反馈信息的时刻c(n)、第j传感器接收所述反馈信息的时刻d(n);
7、获取第j传感器的时钟同步估计向量qij,所述时钟同步估计向量qij包括第j传感器发送第一授时信息的时刻a1(n)、第i传感器接收第一授时信息的时刻b1(n)、时钟观测向量hij(n)、时刻c(n)和时刻d(n)。
8、其中一种可能的实现方式中,所述时钟观测向量hij(n)表示为:
9、hij(n)={x1(n) x2(n) x3(n) … xm(n)}
10、式中,时间差xk(n)表示第k个观测数据,即连续两条授时信息之间的时间差,k∈{1,…,m}。
11、其中一种可能的实现方式中,计算hij(n)的均值eij(n)及传感器连续n个授时周期的均值eijn、方差σijn,包括:
12、利用公式(1)计算观测向量hij(n)的均值eij(n),表示为:
13、
14、利用公式(2)计算观测向量hij(n)的方差σij(n),表示为:
15、
16、利用公式(3)计算第j个传感器连续n个授时周期的均值eijn,表示为:
17、
18、利用公式(4)计算第j个传感器连续n个授时周期的方差σijn,表示为:
19、
20、其中,方差σijn用于反映授时周期的波动。
21、其中一种可能的实现方式中,根据eij(n)、eijn、σijn确定传感器的历史一致性参数p(n),表示为:
22、
23、其中,历史一致性参数p(n)用于对预设时间段内的授时信息进行一致性评估。
24、其中一种可能的实现方式中,确定传感器的受干扰表征参数,判断第n授时周期是否授时成功,包括:
25、利用公式(7),计算第i个传感器受干扰表征参数s(n),表示为:
26、
27、利用公式(8),判断第i传感器是否授时成功,表示为:
28、
29、若满足公式(8),则确定第n授时周期授时成功;若不满足,则授时失败。
30、其中一种可能的实现方式中,授时成功后,确定各个传感器与最优时钟源qin之间的偏差,包括:
31、按照公式(9)计算第i个传感器与最优时钟源qin之间的偏差of
32、
33、式中,a1(n)为第j传感器发送第一授时信息的时刻、b1(n)第i传感器接收第一授时信息的时刻、c(n)为第i传感器向第j传感器发送反馈信息的时刻、d(n)为第j传感器接收所述反馈信息的时刻。
34、其中一种可能的实现方式中,传感器由自身晶振计时,各个传感器的当前时钟tnowi,表示为:
35、
36、式中,tbegini表示第i个传感器计时的开始时刻;ni表示第i个传感器从计时开始时刻记录的晶振脉冲数;fi表示第i个传感器自身晶振的频率。
37、其中一种可能的实现方式中,更新各个传感器的当前时钟,包括:
38、按照公式(10)更新第i个传感器当前时钟tnowi
39、tnowi=tnowi-of(10)
40、式中,of为第i传感器与最优时钟源qin之间的偏差。
41、与现有技术相比,本技术技术方案存在如下有益效果:
42、本技术提供的技术方案,针对区域内传感器网络的实际时间同步需求,通过实时采集传感器多路时钟源的数据质量,及时对多个时钟源的时钟精度进行评估,自主分析时钟源的精度波动,自主隔离受到瞬时干扰的时钟源。
43、在评估了各个时钟源的精度后,自主筛选出精度最高、稳定性最好的时钟源作为系统的最优时钟源,确保系统始终使用最可靠的时钟源进行时间同步,解决了区域内传感器网络的可靠时间同步问题,提高了时间同步的鲁棒性。同时减少了人工干预的需要,降低了运维成本和复杂度。
44、相比传统的手动或周期性评估方法,采用本技术提供的技术方案,在时间同步方面具有更高的实时性、准确性及抗干扰性,最大限度的避免了时钟误差导致的系统性能下降或故障问题。
45、综上,本技术能够快速动态自主评定区域内时钟精度,自主筛选最优的时钟源用于时间同步,从而显著提高系统的时间同步精度和整体性能。
本文地址:https://www.jishuxx.com/zhuanli/20240801/240777.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表