基于进化计算的无人机网络关键节点识别方法
- 国知局
- 2024-08-02 13:56:35
本发明涉及无人机应用,具体涉及一种基于进化计算的无人机网络关键节点识别方法。
背景技术:
1、近年来,无人机集群在军事、农业、航空等领域受到广泛关注。无人机集群中的每个无人机节点在单体执行任务的同时,也会其周围无人机保持通讯连接,从而形成一个自组织的、非体系化的无人机网络。在无人机集群网络中,所有无人机在功能上是平等,但由于无人机持续移动的特性和无人机有限的通信距离,会造成无人机集群网络拓扑不断发生变化,从而导致在移动过程中会存在一些中心度较高的关键节点。这些节点往往承担着网络中枢的作用,如果被攻击或者出现故障,对网络的影响程度较大。
2、因此,如果能够有效的识别出这些节点,就可以针对这些节点提高开展重点保护,减少重大风险发生概率。
3、目前已有采用影响力最大化算法可以用来进行关键节点识别,有关影响力最大化的算法可分为以下3种:
4、启发式算法:影响力最大化问题涉及在网络中选择一组节点,以最大化信息传播或影响力扩散。由于该问题通常是一个组合优化问题,解决它的确切解往往是非常昂贵的。因此,启发式算法被广泛应用于影响力最大化问题。贪心算法通过在每一步选择能够最大程度增加当前影响力的节点,逐步构建具有最大影响力的节点集合。celf算法计算每个节点的影响力估计,排序节点并选择具有最大影响力估计的节点。tim算法通过估计节点的全局影响力,有针对性地选择具有最大潜在影响力的节点。
5、智能算法:智能算法通过模拟自然现象或者使用机器学习技术来解决复杂的影响力最大化问题。遗传算法模拟自然选择和基因变异的过程,通过对候选解进行进化操作,生成新的解并逐渐趋向于更优解;粒子群优化算法模拟群体中个体的协作和信息传递过程。每个个体(粒子)在搜索空间中移动,并通过个体的历史最佳和群体的全局最佳来调整其位置。模拟退火算法拟金属冷却的过程,通过接受较差解的概率来避免陷入局部最优解。
6、社群检测算法:社群检测算法能够发现网络中的社群结构,即密切相连的节点群体。影响力最大化算法可以结合社群检测,选择具有高内部连接性的社群中的节点,以增加信息在社群内的传播效果。
7、但是由于无人机集群网络的动态变化快和节点数量多,导致以上影响力最大化的算法的应用过程有如下局限:
8、缺点1:计算复杂度高。许多影响力最大化算法在大规模网络上的计算复杂性较高。例如,模拟信息传播或影响力扩散的过程可能需要多次模拟以获取准确的结果,这在大型网络中可能变得非常耗时。
9、缺点2:不适用于动态网络。大多数算法假定网络是静态的,但在实际应用中,网络结构可能随时间变化。算法的鲁棒性和适应性对于动态网络的情况可能存在挑战。
10、缺点3:容易陷入局部最优解。一些算法可能陷入局部最优解,特别是贪心算法等启发式方法。这可能导致算法无法找到全局最优解。
11、如何能突破以上局限性,提供一种关键节点识别方法,是目前亟待解决的问题。
技术实现思路
1、有鉴于此,本发明提供了基于进化计算的无人机网络关键节点识别方法,优化设计了初始化、变异、交叉和选择的具体操作,设计了适应度函数及你给个体选择,从而得到适应度值最优的个体作为关键节点,其算法复杂度低,适用于动态网络,而且不容易陷入局部最优解。
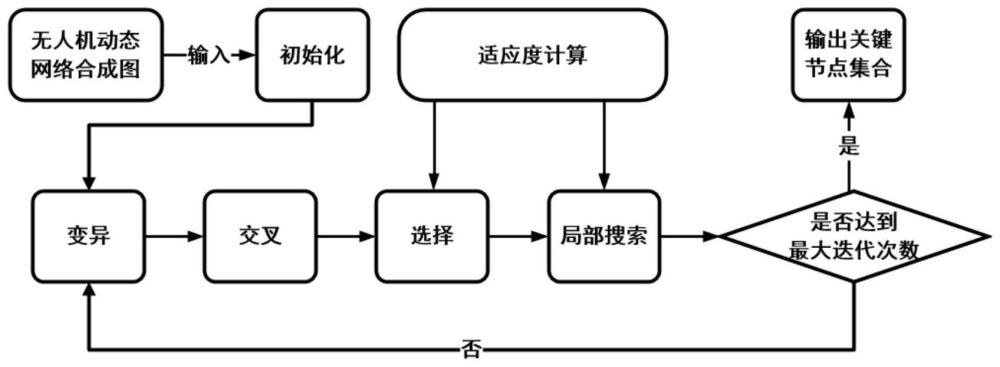
2、为达到上述目的,本发明提供的基于进化计算的无人机网络关键节点识别方法,针对无人机集群网络进行关键节点识别,具体包括如下步骤:
3、步骤1:构建无人机通信网络的动态拓扑结构,以无人机动态网络合成图g_merge、需要识别的关键节点数量k、种群个体数量q、无人机动态网络中的节点数量n作为初始输入;初始化种群演化代数为1。
4、步骤2:针对种群的个体xi中的单个元素xij进行随机替换,即:以mp的概率将xij替换为g_merge中的其他节点。
5、步骤3:在原始种群x和突变种群x_mutation之间进行交叉操作,生成一个交叉种群。
6、步骤4:使用适应度函数计算所有个体的适应度值。
7、步骤5:在交叉种群个体和原始种群的个体之间进行选择,选取其中适应度值较优的。
8、步骤6:判断种群演化代数是否达到最大预设值,若达到这种群演化结束,否则种群演化代数增1,返回步骤2。
9、种群演化结束后,以最后一代种群演化得到的种群中适应度值最优的个体即为识别到的关键节点。
10、进一步地,构建无人机通信网络的动态拓扑结构,具体为:选用ns3离散网络模拟器来模拟无人机通信网络,使用olsr协议模拟构建出无人机通信网络的动态拓扑结构,并对动态拓扑进行导出,从而获取无人机集群动态网络拓扑数据。
11、进一步地,获以无人机动态网络合成图g_merge、需要识别的关键节点数量k、种群个体数量q、无人机动态网络中的节点数量n作为初始输入,具体为:
12、在获取到无人机动态网络拓扑数据后,以固定的时间间隔截获动态网络拓扑数据,以快照的形式存储,建立网络序列;动态网络g={g0,g1,..,gt}是无人机网络拓扑的时间排序序列,gt=(vt,et)对应于t时刻的网络拓扑,其中vt表示t时刻节点集,et表示t时刻边集。
13、对无人机网络时间排序序列g进行合成,合成图记为g_merge,合成规则为:每个快照对应一个时刻,对每个时刻的节点集vt取并集组成v_merge,对每个时刻的边集et取并集组成e_merge,统计e_merge中的每条边在各个快照的边集et中的出现频次,组成为边的权重集合w;最终,构成网络合成图g_merge=(v_merge,e_merge,w);
14、构造种群x,x是由q个个体组成的,每个个体是一个k维的向量,向量的每一个元素就是g_merge中的一个节点,使用度中心性算法从网络g中取出前k个度最大的节点,作为种群x的初始数据填充。
15、进一步地,步骤2:针对种群的个体xi中的单个元素xij进行随机替换,即:以mp的概率将xij替换为g_merge中的其他节点,具体为:
16、以mp的概率将xij替换为g_merge中的其他节点,具体的突变规则如下:
17、
18、其中,n表示网络中的节点总数,randint(0,n)表示随机生成0到n的整数,random表示0到1之间的随机数,xij_mutation表示经过变异后的个体元素,mp表示变异参数。
19、进一步地,步骤3:经过变异之后,在原始种群x和突变种群x_mutation之间进行交叉操作,生成一个交叉种群,具体为:
20、在交叉操作的具体实现上,使用交叉概率参数cp来控制个体之间配对的概率,交叉的方式为:原始个体的每一个元素xij都与变异种群个体的每一位元素xij_muation在交叉概率cp的控制下进行交叉配对,形成交叉之后的个体xij_crossover;
21、交叉规则如下方公式所示:
22、
23、其中,n表示g_merge中的节点总数,randint(0,n)表示随机生成0到n的整数,random表示0到1之间的随机数,xij_mutation表示经过变异后的个体的元素,xij_crossover表示交叉后的个体的元素,cp表示交叉参数。
24、进一步地,使用适应度函数计算所有个体的适应度值,具体为:
25、将关键节点的适应度值转换为关键节点在si模型上的影响传播范围,适应度函数wedv表示如下:
26、
27、其中,wij表示从节点i到节点j的有向边权值,k为关键节点数量,s表示关键节点集合,e表示关键节点所形成的边集,pij表示si模型的传播概率,ns(1)为s的一跳邻居节点集合,ns(1)/s表示不包含s的一跳邻居节点集合。
28、进一步地,步骤5:在交叉种群个体和原始种群的个体之间进行选择,选取其中适应度值较优的,具体为:
29、采用两两对比取较优的贪心策略,在交叉种群的个体xi_crossover和原始种群的个体xi之间进行选择。选择规则如下方公式所示:
30、x′i={xi,xi_crossover}
31、其中xi_selction代表筛选后的个体,xi代表原个体,xi_crossover代表经过交叉后的个体,fitness(*)为适应度函数即wedv函数,argmax表示筛选xi和xi_crossover间选择适应度最大的个体。
32、进一步地,步骤6中,达到最大演化次数后,还包括局部优化过程:
33、达到最大演化次数后,获得的最优的关键节点集合为gbset,则针对gbest中的每个节点,搜索一个能够提升gbest适应度值的邻居节点;如果能找到此类节点,则用邻居节点替换该节点;如果找不到,则维持gbest中的节点。
34、有益效果:
35、本发明提供的基于进化计算的无人机网络关键节点识别方法,针对无人机集群网络,设计了一系列的无人机网络中关键节识别流程,包括:无人机网络模拟、网络拓扑数据获取、无人机网络序列化存储与合成、关键节点识别本发明属于智能算法,但与常见的智能算法的研究仅限于静态网络不同。本发明设置了动态网络的存储以及输入算法,能够实现动态网络上影响力最大化问题的解决,为了能够让进化算法应用到无人机动态网络上,本发明提出了包含时序信息的综合适应度函数wedv,同时详细设计了进化算法中初始化、变异、交叉、选择的具体操作。经实验证明,本发明能够准确识别到无人机集群网络中的关键节点,且算法效率较高,算法复杂度低,适用于动态网络,而且不容易陷入局部最优解。
本文地址:https://www.jishuxx.com/zhuanli/20240801/241176.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。