摄像模组的解析力测试方法、电子设备及存储介质与流程
- 国知局
- 2024-08-02 14:02:30
本申请实施方式涉及摄像模组,具体涉及一种摄像模组的解析力测试方法、电子设备及存储介质。
背景技术:
1、随着增强现实(ar)/虚拟现实(vr)技术的发展,ar/vr智能产品在生活中得到了广泛的应用。其中,ar/vr智能产品中的摄像模组大多为多景深模组,在出厂前需对摄像模组在不同物距下的解析力进行测试以保证摄像模组的解析力满足要求。
2、利用设备对摄像模组在不同物距下的解析力进行测试时,如果不同物距之间相差较小,则可以通过硬件来辅助设备进行解析力测试,但这样会导致设备成本增加、设备体积增大以及操作难度增大;如果不同物距之间差较大时,则可以使用增距镜来辅助设备进行解析力测试,但这样会导致成本增加以及操作速度相对降低。此外,测试时所使用的标板需要进行特制,无法做到通用性。
技术实现思路
1、本申请的实施方式提供了一种可至少部分解决现有技术中的上述至少一个缺点或者其他缺点的摄像模组的解析力测试方法、电子设备及存储介质。
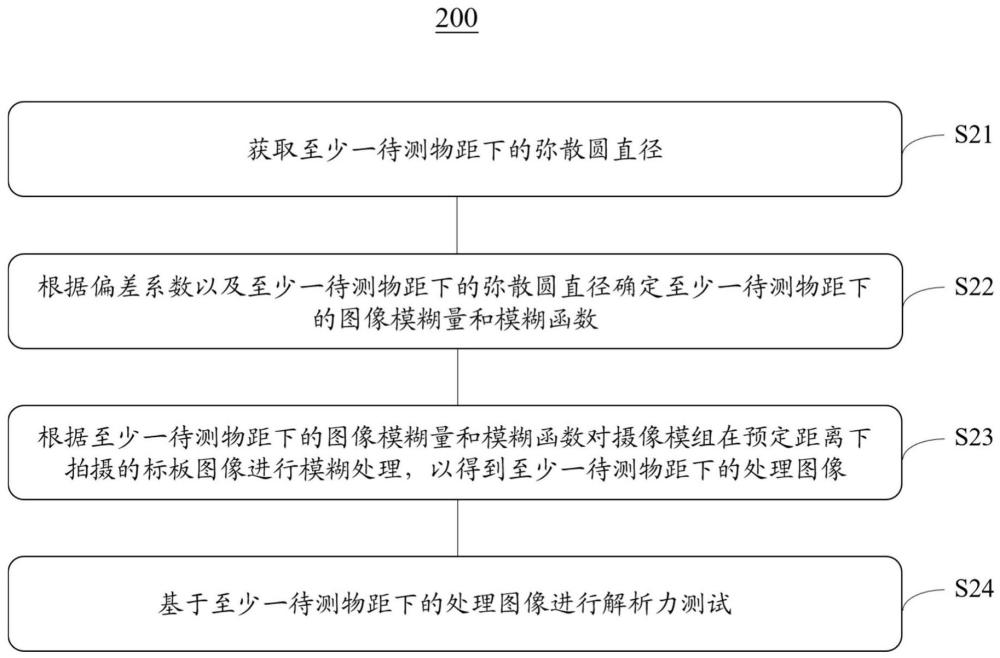
2、本申请的第一方面提供了一种摄像模组的解析力测试方法,其包括:获取至少一待测物距下的弥散圆直径;根据偏差系数以及至少一待测物距下的弥散圆直径确定至少一待测物距下的图像模糊量和模糊函数;根据至少一待测物距下的图像模糊量和模糊函数对摄像模组在预定距离下拍摄的标板图像进行模糊处理,以得到至少一待测物距下的处理图像;以及基于至少一待测物距下的处理图像进行解析力测试。
3、根据本申请的一个示例性实施方式,根据偏差系数以及至少一待测物距下的弥散圆直径确定至少一待测物距下的图像模糊量和模糊函数包括:任一待测物距下,根据摄像模组的光学传递函数的拟合形式所对应的离焦模型选择相应的模糊算法来对光学传递函数进行模糊,以得到模糊函数。
4、根据本申请的一个示例性实施方式,模糊算法包括均值模糊算法和高斯模糊算法中的至少一项。
5、根据本申请的一个示例性实施方式,获取至少一待测物距下的弥散圆直径包括:任一待测物距下,根据摄像模组的焦距f、摄像模组的光圈参数f、摄像模组与标板之间的距离uaa以及当前的待测物距ui计算出当前的待测物距下的弥散圆直径δi,其中,i为待测物距的次序,i≥1。
6、根据本申请的一个示例性实施方式,任一待测物距下的弥散圆直径δi通过以下确定:
7、
8、根据本申请的一个示例性实施方式,任一待测物距下的图像模糊量包括各个刀口位置的图像模糊量ρim,其中,
9、
10、其中,δi为待测物距的次序为i时的弥散圆直径,αm、βm和γm为刀口位置的次序为m时的偏差系数,i≥1,m≥1。
11、根据本申请的一个示例性实施方式,确定偏差系数的方法包括:获取初始物距下的各个刀口位置的初始图像模糊量;根据摄像模组的焦距、摄像模组的光圈参数、摄像模组与标板之间的距离以及初始物距计算出初始物距下的初始弥散圆直径;以及根据初始物距下的初始弥散圆直径和各个刀口位置的初始图像模糊量确定出偏差系数。
12、根据本申请的一个示例性实施方式,获取初始物距下的各个刀口位置的初始图像模糊量包括:从标板图像中提取出至少一个刀口位置处的刀口图像;针对任一刀口图像,获取刀口图像的边缘扩散函数曲线;对边缘扩散函数曲线进行求导以得到线扩散函数曲线,并对线扩散函数曲线进行傅里叶变换;对傅里叶变换后的线扩散函数曲线进行拟合,以得到摄像模组在任一刀口位置的光学传递函数;以及从摄像模组在任一刀口位置的光学传递函数中提取对应参数作为初始物距下的任一刀口位置的初始图像模糊量。
13、根据本申请的一个示例性实施方式,基于至少一待测物距下的处理图像进行解析力测试包括:针对任一待测物距下的处理图像,通过空间频率响应法进行解析力测试。
14、本申请的第二方面提供了一种电子设备,其包括至少一个处理器以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行本申请的第一方面所述的摄像模组的解析力测试方法。
15、本申请的第三方面提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时,实现本申请的第一方面所述的摄像模组的解析力测试方法。
16、根据本申请的一些实施方式,通过不同物距下的图像模糊量和模糊函数对摄像模组在预定距离下拍摄的标板图像进行模糊处理,可得到不同物距下的处理图像,然后,对各个物距下的处理图像进行解析力测试,即可完成解析力的快速测试。相较于现有技术,无需硬件或设备等强相关条件以及环境的搭建与调试,就可以进行摄像模组在不同物距下的解析力的快速测试,减少了设备调试不同位置的环节,并且避免测试环境引入测试误差等弊端。
技术特征:1.一种摄像模组的解析力测试方法,其特征在于,包括:
2.根据权利要求1所述的方法,其中,根据偏差系数以及至少一待测物距下的所述弥散圆直径确定至少一待测物距下的图像模糊量和模糊函数包括:
3.根据权利要求1所述的方法,其中,获取至少一待测物距下的弥散圆直径包括:
4.根据权利要求3所述的方法,其中,任一所述待测物距下的所述弥散圆直径δi通过以下确定:
5.根据权利要求1所述的方法,其中,任一所述待测物距下的图像模糊量包括各个刀口位置的图像模糊量ρim,其中,
6.根据权利要求5所述的方法,其中,确定所述偏差系数的方法包括:
7.根据权利要求6所述的方法,其中,获取初始物距下的各个所述刀口位置的初始图像模糊量包括:
8.根据权利要求1所述的方法,其中,基于至少一待测物距下的所述处理图像进行解析力测试包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至8中任一项所述的摄像模组的解析力测试方法。
技术总结本申请实施方式提供了一种摄像模组的解析力测试方法、电子设备及存储介质。摄像模组的解析力测试方法可以包括:获取至少一待测物距下的弥散圆直径;根据偏差系数以及至少一待测物距下的弥散圆直径确定至少一待测物距下的图像模糊量和模糊函数;根据至少一待测物距下的图像模糊量和模糊函数对摄像模组在预定距离下拍摄的标板图像进行模糊处理,以得到至少一待测物距下的处理图像;以及基于至少一待测物距下的处理图像进行解析力测试。技术研发人员:毛之华,郑锡斌,方明丹,蔡赞赞,杜亚凤受保护的技术使用者:余姚舜宇智能光学技术有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/241475.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。