一种基于深度学习的汽车网络入侵检测预防系统及方法与流程
- 国知局
- 2024-08-02 14:34:07
本发明涉及一种汽车网络入侵检测预防系统及方法,尤其涉及一种基于深度学习并结合动力学参数的智能汽车网络入侵检测预防系统方法,属于汽车网络安全。
背景技术:
1、随着汽车技术的不断创新和发展,车载网络已经变得越来越复杂和智能,它连接了各种传感器、执行器和控制单元,成为汽车的核心部分。现代汽车变得越来越依赖于这些先进的车载网络,这些系统的脆弱性和安全风险对于汽车越来越重要。
2、在传统的网络安全评估中,考虑的大多是静态或常规操作下的车载网络行为。但实际上,当驾驶员进行极限操作,如紧急刹车、突然加速或急转弯时,由于车辆的物理特性和车载系统之间的紧密互动,车载网络的通信特征可能会出现显著的变化。例如,为了响应紧急刹车,刹车系统可能会频繁地与其他控制单元通信,从而改变网络流量的模式。
3、这些人为极限操作中的车载网络特征变化,可能会误导传统的入侵检测系统,使其错误地认为是网络攻击或系统故障。因此,仅仅依靠常规操作下的网络通信特征来判断网络状态,可能无法准确地识别真正的安全威胁。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于深度学习的汽车入侵检测预警系统及方法,通过理解和解析人为操作下的车载网络特征变化,并与潜在的恶意攻击进行区分,以确保在各种极端驾驶场景下,车载网络的安全性和稳定性都得到有效的保障。
2、为了达到以上目的,本发明的具体技术方案如下:一种基于深度学习的汽车网络入侵检测预防系统,包括相互连通的数据收集预处理模块、深度学习模型构建模块、模型训练模块、实施入侵检测预警模块和自适应学习更新模块;
3、所述数据收集预处理模块通过其内部的若干传感器实时收集车辆的动态参数,并实时捕获车载网络的通信流量;
4、所述深度学习模型构建模块从动力学数据和车载网络通信数据中自动提取关键特征,包括特征提取单元和神经网络结构单元;
5、所述模型训练模块收集正常驾驶和已知异常驾驶场景下的动力学数据和车载网络通信数据,利用所述数据集训练深度学习模型获得的关键特征,通过交叉验证等方法进行模型的验证与调优;
6、所述实施入侵检测预警模块将收集到的动力学数据和车载网络通信数据实时输入至训练完成的深度学习模型中,并在检测到异常行为时立即生成并发送预警信号;
7、所述自适应学习更新模块根据实时反馈和新的数据持续更新和优化深度学习模型,并利用迁移学习策略适应新环境。
8、进一步的,所述数据收集与预处理模块包括动力学数据采集单元:通过配置的传感器实时捕获车辆的动态参数;
9、车载网络通信数据采集单元:对车载网络的通信流量进行实时捕获;
10、数据预处理单元:对动力学数据和车载网络通信数据进行清洗、标准化和同步处理,输出预处理后的数据。
11、进一步的,所述关键特征由动力学数据特征及车载网络通信数据特征组成;
12、通过分析动力学数据,以检测车辆异常行为,所述动力学数据特征包括车速、转向角度、加速度及转向速度;
13、所述车载网络通信数据特征包括:数据包频率,监测车载网络通信数据包的频率,检测是否有异常的通信活动;
14、数据包大小,分析通信数据包的大小,识别异常的数据传输;
15、通信端口,检查通信数据包的目标端口,确认是否存在未经授权的访问尝试;
16、数据传输协议,分析通信数据使用的协议,检测不寻常的协议或协议切换。
17、进一步的,所述动力学数据采集单元的传感器包括速度传感器、加速度传感器、制动压力传感器和转向角度传感器,所述动力学数据采集单元的传感器数据来自于车辆自身的传感器数据,如esc等。
18、进一步的,所述模型训练模块包括:训练数据集构建单元,以收集正常驾驶和已知异常驾驶场景下的数据,为模型提供训练数据;
19、模型训练单元,使用训练数据集对深度学习模型进行训练;
20、验证与调优单元,利用交叉验证对模型性能进行评估和优化;
21、所述异常驾驶场景包括:快速加速、急刹车、异常转弯、速度超限及异常控制输入。
22、进一步的,所述实时入侵检测与预警模块包括:数据输入单元,实时将动力学数据和车载网络通信数据输入到已训练的模型中;
23、异常检测单元,模型实时评估输入数据的状态,并输出其网络行为的状态;
24、预警生成单元,当检测到异常时,立即生成预警,通知相关人员或系统。
25、进一步的,所述自适应学习与更新模块包括:在线学习单元,根据新数据和实时反馈,持续更新和优化模型;
26、模型迁移单元,当车型或驾驶环境变化时,利用迁移学习快速适应新的情境。
27、一种基于深度学习的汽车网络入侵检测预防系统的方法,包括如下步骤:
28、步骤1,通过数据收集预处理模块的速度传感器、加速度传感器、制动压力传感器和转向角度传感器实时收集车辆的对应的动态参数,并实时捕获车载网络的通信流量;
29、步骤2,通过深度学习模型构建模块从动力学数据和车载网络通信数据中自动提取关键特征;
30、步骤3,将前述步骤中获取的正常驾驶和已知异常驾驶场景下的动力学和网络通信数据输入至模型训练模块,利用所述数据集训练深度学习模型获得的关键特征,通过交叉验证等方法进行模型的验证与调优;
31、步骤4,实施入侵检测预警模块将收集到的动力学数据和车载网络通信数据实时输入至训练完成的深度学习模型中,并在检测到异常行为时立即生成并发送预警信号;
32、步骤5,自适应学习更新模块系统根据实时反馈和新的数据持续更新和优化深度学习模型,并利用迁移学习策略适应新环境。
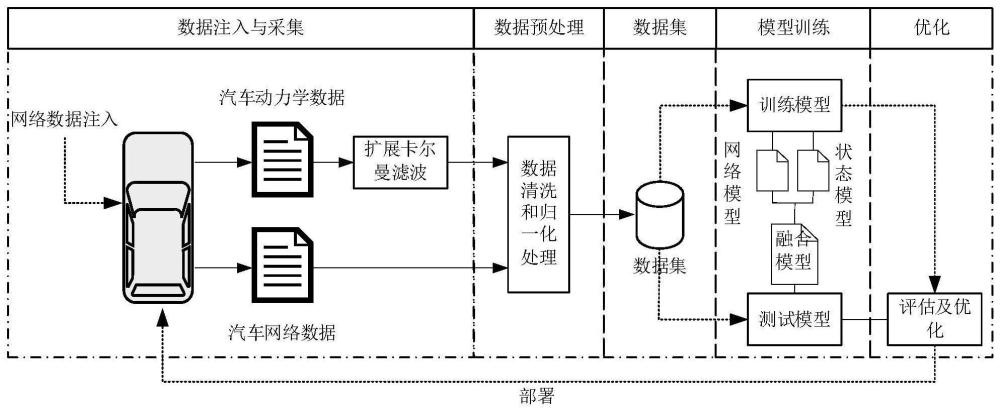
33、进一步的,所述步骤1中,由于传感器数据含有白噪声,采用扩展卡尔曼滤波以处理来自速度传感器、加速度传感器、制动压力传感和转向角度传感器的动力学数据,以滤除白噪声和其他干扰,并对动力学数据进行滤波后构建数据集和测试集;包括以下步骤:
34、步骤1.1,状态空间建模:根据车辆动力学方程和传感器模型,构建系统的状态空间模型,包括状态向量、观测向量和状态转移方程。
35、步骤1.2,初始化:初始化滤波器的状态估计和协方差矩阵,如式(1.1),(1.2)所示;
36、
37、
38、步骤1.3,预测步骤:使用状态转移方程对系统状态进行预测,并更新状态估计和协方差矩阵;
39、步骤1.4,更新步骤:使用观测向量和测量方程,将预测值与观测值进行比较,并重新更新状态估计和协方差矩阵;
40、步骤1.5,输出:从卡尔曼滤波器中提取经过滤波的动力学数据,以构建清洁的数据集和测试集。
41、进一步的,所述步骤2中,利用transformer和循环神经网络rnn自动从预处理数据中提取关键特征,采用两阶段的深度学习,同时训练,分别完成各自任务;利用transformer学习车载网络通信报文和循环神经网络rnn动力学数据,具体步骤如下:
42、步骤2.1,数据收集和准备:
43、收集汽车传感器数据中系统在正常和受攻击状态下的动力学数据和收集包含正常和恶意车载网络通信的数据集,然后对其进行训练前的数据预处理,包括数据清洗、标准化和分割等操作,以准备用于训练和测试的数据集;
44、阶段一:网络通信报文的深度学习:
45、步骤2.2,第一阶段对前述步骤中获取的车载网络数据进行分割:
46、将70%、15%、15%的数据集分别作为模型训练的训练集、验证集和测试集;训练集用于训练transformer模型,验证集用于调整超参数和监控模型性能,测试集用于最终评估模型的性能;
47、步骤2.3,建立transformer模型:
48、输入层:根据数据的维度设置一个输入层,将数据扩展到固定的特征宽度,根据汽车网络数据,编码器输入大小设置为512;
49、编码层:根据编码输入长度,设置transformer参数输入参数,并且设置层数范围为8-16;
50、解码层:使用全连接层作为transformer解码层,输入参数为编码输入长度,输出参数为分类数量;
51、dropout参数:对数据量较少的深度学习,为了避免过拟合,可以对训练数据进行增强及添加dropout层,dropout参数一般设置为0.2;
52、步骤2.4,模型编译:
53、采用通用损失函数类型、优化器进行损失函数和优化函数计算。
54、步骤2.5,模型训练:
55、使用训练集对transformer模型进行训练,训练期间,模型将自动学习从数据中提取关键特征;
56、阶段二:系统运行状态数据的深度学习:
57、步骤2.6,第二阶段对前述步骤中获取的动力学数据进行分割:
58、将车载网络数据按照70%、15%、15%的比例分割为训练集、验证集和测试集;
59、步骤2.7,建立rnn模型:
60、设计循环神经网络rnn模型,选择长短时记忆网络(lstm)用于捕捉车载网络数据中的时序依赖关系;
61、输入层:定义输入层,包括时序数据的三维张量,样本数量、时间步数和特征数量;
62、rnn层:添加lstm层,指定单元数量和激活函数;
63、全连接层:添加全连接层,用于输出预测结果;
64、激活函数:在每个层后添加适当sigmoid激活函数;
65、步骤2.8,模型编译:
66、选择合适的损失函数、优化器和评估指标;对于二元分类问题,通常使用二元交叉熵作为损失函数,adam优化器,并使用准确度作为评估指标;
67、步骤2.9,模型训练:
68、使用训练集对lstm模型进行训练,在训练过程中,模型将学习如何根据先前的时序信息进行预测;
69、步骤2.10,权重融合:
70、获取权重:在每个阶段训练完成后,获取各自模型的权重;
71、融合权重:将两个模型的权重进行融合,采用动态权重融合方法在训练过程中动态地调整模型的权重;
72、步骤2.11,危害概率计算:
73、模型整合:将网络通信报文的预测结果和系统运行状态的预测结果整合到网络入侵检测模型中;
74、计算危害概率:采用逻辑回归方法来计算综合模型的输出,该输出作为网络入侵的危害概率;
75、步骤2.12,超参数调整:
76、在验证集上调整模型的超参数,包含学习率、批量大小、卷积核大小、层数等,以提高模型性能;
77、步骤2.13,性能评估:
78、使用测试集评估模型的性能,使用指标准确率、精确度、召回率、f1分数等来衡量模型的性能;
79、步骤2.14,模型优化:
80、根据测试结果,对模型进行优化,包括增加训练数据、调整模型结构或更改超参数;
81、步骤2.15,部署和监控:
82、部署模型:将整合模型部署到车辆实际网络入侵检测系统中。
83、监控性能:定期监控模型的性能,自适应学习更新模块系统根据实时反馈和新的数据持续更新和优化深度学习模型,并利用迁移学习策略适应新环境。
本文地址:https://www.jishuxx.com/zhuanli/20240801/243196.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。