多径信息辅助的城市拐角场景非视距三维多目标定位方法
- 国知局
- 2024-08-02 14:50:18
本发明属于通信,涉及一种多径信息辅助的城市拐角场景非视距三维多目标定位方法。
背景技术:
1、在6g移动通信系统中,更高的频段(毫米波乃至太赫兹)、更宽的带宽使高精度、高分辨率感知成为可能,从而可以在一个系统中实现通信感知一体化,使通信与感知功能相辅相成。2023年,通信感知一体化已被itu-r确认为imt-2030的六大应用场景之一。定位技术作为通感一体中重要技术,一方面可以感知周围环境,根据环境进行波束赋形,提高通信质量,另一方面定位技术本身也是多种应用的基础,包括智慧城市、智能交通、城市应急救援等。在楼宇密布的城市环境中,辐射源目标往往受到建筑物遮挡,传统卫星定位技术无法进行精确定位,越来越多研究者将目光投向了使用基站或者移动站点对目标进行定位。在城市“l”型拐角非视距场景下,辐射源目标发射的信号无法通过视距传播到达基站接收端,定位拐角非视距目标较为困难。因此,利用街道两侧反射到达基站的多径信息定位拐角后非视距目标是当前无线定位面临的关键问题。
2、使用多径信号的测距信息对目标进行定位是城市非视距环境下的常用方法。传统非视距目标定位方法利用单个辐射源目标信号参数,构建定位目标函数,通过优化算法对目标函数进行求解获得目标位置。然而,在实际定位场景下,通常有多个非视距目标需要位置信息估计。当多个非视距目标多径信号同时到达基站接收端,基站接收端难以区分不同目标多径信息,故此对多个非视距目标进行定位十分困难。因此需要研究在建筑信息辅助情况下如何利用多径信息对多个非视距目标进行精准定位。
技术实现思路
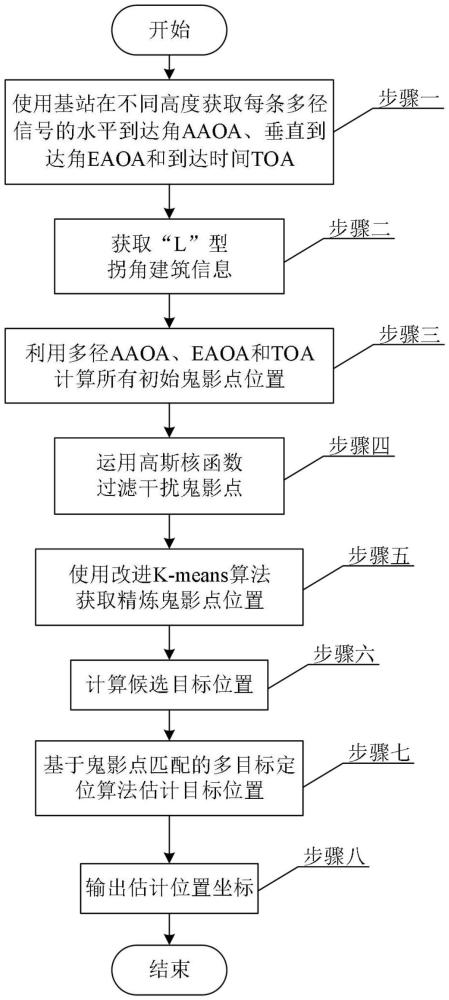
1、有鉴于此,本发明的目的在于提供一种多径信息辅助的城市拐角场景非视距三维多目标定位方法。首先,利用基站在不同高度接收多个目标多径信息,使用获得多径水平到达角aaoa、垂直到达角eaoa和到达时间toa计算所有初始鬼影点位置。其次,利用高斯核函数过滤干扰鬼影点后,运用改进k-means算法确定精炼鬼影点位置。最后,运用鬼影点匹配算法估计多个目标位置,实现城市拐角环境非视距多目标定位。
2、为达到上述目的,本发明提供如下技术方案:
3、该方法包括以下步骤:
4、步骤一:使用基站在不同高度hi接收多径信号,i=1,2,...,m,得到每条多径信号的水平到达角aaoa垂直到达角eaoa和到达时间toa其中j=1,2,...,n,m表示基站接收多径的高度个数,n表示一个高度所接收多径信号条数;
5、步骤二:获取“l”型街道拐角建筑信息,基站位置到街道拐点水平距离为d1,街道宽度为d2;
6、步骤三:根据步骤一中接收全部多径信息,计算所有初始鬼影点位置;
7、步骤四:考虑到干扰鬼影点对定位精度的影响,使用高斯核函数对干扰鬼影点进行过滤;
8、步骤五:使用改进k-means算法确定精炼鬼影点位置;
9、步骤六:根据步骤二中所获取的街道拐角建筑信息,完成候选目标位置计算;
10、步骤七:使用所提出的基于鬼影点匹配的多目标定位算法估计目标位置;
11、步骤八:定位结束,输出估计的目标位置ws=[xs,ys,zs]t,s=1,2,...,s,s表示目标个数。
12、进一步,所述步骤三具体为:
13、设基站二维位置为[xb,yb]t,基站位于高度hi时接收到第j条多径的参数分别为和多径信号传播距离其中c为光速,故初始鬼影点可由多径参数得到,表示为公式(1)所示,所有初始鬼影点集合表示为
14、
15、进一步,所述步骤四具体为:
16、步骤四-一:对于两个初始鬼影点坐标与这两个初始鬼影点的高斯核为:
17、
18、其中,σ2为所有初始鬼影点间欧式距离的方差;
19、步骤四-二:计算所有伪散射体的高斯核函数,并将所有高斯核函数取平均作为参考高斯核函数如公式(3)所示;
20、
21、其中,表示任意两个不相同的初始鬼影点的高斯核,不能同时满足i=u,j=v,amn表示任取两个不相同初始鬼影点的情况数量,u是所有初始鬼影点集合;
22、步骤四-三:设置所有初始鬼影点的临近鬼影点初始数量为0,令u=v=1;
23、步骤四-四:计算初始鬼影点与另一初始鬼影点的高斯核不能同时满足i=u,j=v,将与dave比较,若则是的临近鬼影点,同时v=v+1;
24、步骤四-五:若v>n,则令u=u+1,若u≤m,则令v=1转入步骤四-四,否则转入步骤四-六;
25、步骤四-六:将从小到大排列,选取临近鬼影点数量最少的n/5个初始鬼影点作为干扰鬼影点,将干扰鬼影点从初始鬼影点中剔除,过滤后的初始鬼影点集合为u′={u1′,…,ui′},i=1,…,4/5mn。
26、进一步,所述步骤五具体为:
27、步骤五-一:将过滤后的初始鬼影点集合u′={u1′,…,ui′},i=1,…,4/5mn作为k-means算法的输入数据集,令过滤后的初始鬼影点数为n′=4/5mn,观察初始鬼影点分布给定分簇数目为k;
28、步骤五-二:计算数据集u′中所有鬼影点与原点之间的欧氏距离,根据欧式距离将数据集u′中所有初始鬼影点进行升序排列得到新的数据集u″={u1″,…,ui″},i=1,…,n′,根据给定分簇数目将数据集u″中初始鬼影点分为k个部分,将第一部分中第一个初始鬼影点u1″确定为第一个确定聚类中心c1,其后每个部分中的第一个初始鬼影点u″(k-1)n′/k+1暂定为初始聚类中心c′k,k=2,…,k,令k=2,t=1;
29、步骤五-三:计算初始聚类中心c′k=[xk′,yk′,zk′]t与确定聚类中心cm=[xm,ym,zm]t,m=1,…,k-1之间的欧式距离,表示为式(4)所示,给定聚类中心匹配阈值ε,计算初始聚类中心c′k的匹配因子nk,表示为式(5)所示;
30、
31、
32、步骤五-四:若nk=0,则初始聚类中心c′k可判定为确定聚类中心ck,k=k+1,t=1,转到步骤五-六,反之,则转到步骤五-五;
33、步骤五-五:若(k-1)n′/k+1+t>n′,则确定聚类中心转到五-六,反之,若则将初始鬼影点u″(k-1)n′/k+1+t确定为新的初始聚类中心c′k,令t=t+1,转到五-三;
34、步骤五-六:若k>k,则转到步骤五-七,反之转到步骤五-三;
35、步骤五-七:将簇划分c初始化为ck=φ,k=1,…,k,令a=0,给定簇划分最大迭代次数为maxiterations;
36、步骤五-八:对于输入数据集u′={u1′,…,ui′},i=1,…,4/5n′,计算样本ui′和各确定聚类中心ck,k=1,…,k的距离:将ui′标记最小的jik所对应的类别λi,此时更新
37、步骤五-九:对于k=1,2,...,k对ck中的所有样本冲洗计算新的聚类中心如公式(6)所示,同时,a=a+1;
38、
39、步骤五-十:若所有k个聚类中心没有变化则转到步骤五-十一,否则判断a是否等于最大迭代次数,若是等于则转到步骤五-十一,否则转到步骤五-八;
40、步骤五-十一:输出簇划分c={c1,c2,...,ck}和聚类中心{c1,…,ck},将聚类中心{c1,…,ck,…,ck}作为精炼鬼影点
41、进一步,所述步骤六具体为:
42、步骤六-一:结合“l”型街道拐角建筑信息,基站位置到街道拐点水平距离为d1,街道宽度为d2,以及一次反射对称几何关系可计算精炼鬼影点的初始候选目标位置为计算方式为式(7)所示;
43、
44、步骤六-二:结合街道建筑信息,使用式(8)对初始候选目标uc进行筛选,可获得候选目标位置
45、
46、进一步,所述步骤七具体为:
47、步骤七-一:根据定位实际情况给出基站可能接收到的最高多径反射次数q,令p=1,s=1,鬼影点匹配门限ψ;
48、步骤七-二:根据反射对称几何关系计算候选目标次反射依次对应候选鬼影点计算方式如(9)所示;
49、
50、步骤七-二:将候选鬼影点集合中所有候选鬼影点与精炼鬼影点ur中所有精炼鬼影点进行匹配计算,表示为式(10)所示,其中表示计算与之间的欧式距离,q=1,…,q、k=1,…,k,精炼鬼影点中ur满足式(10)的鬼影点表示集合np表示满足式(10)鬼影点个数;
51、
52、步骤七-三:若np≥2,则候选目标为确定目标位置,且令同时更新精炼鬼影点集合令p=p+1,s=s+1,反之,则p=p+1;
53、步骤七-四:若p>p,则转到步骤七-五,否则转到步骤七-二;
54、步骤七-五:所有目标位置ws=[xs,ys,zs]t存入集合w,得到目标位置集合w={w1,…,ws,…ws},s=1,…,s。
55、本发明的有益效果在于:能够使用单基站在城市拐角非视距环境下,充分利用多径信息对多个信号源目标进行精确定位。其中考虑到干扰鬼影点对精炼鬼影点位置确定的影响,使用高斯核函数过滤干扰鬼影点;考虑到传统k-means算法聚类效果易受到初始聚类中心影响,提出改进k-means算法确定精炼鬼影点位置来提高定位精度;基于多径鬼影点分布特性提出基于鬼影点匹配的目标定位算法完成多个辐射源目标位置估计。在范围为50×100m×20的街道定位场景中,在多径水平到达角aaoa、垂直到达角eaoa和到达时间toa的测量误差均服从均值为0,标准差为2%的高斯分布情况下,多提定位方法实现了多个非视距目标三维定位且定位平均误差为小于1m。
56、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240801/244021.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表