一种CPS系统远程状态估计方法、装置及可读存储介质
- 国知局
- 2024-08-02 14:54:14
本发明涉及攻击检测,尤其是指一种cps系统远程状态估计方法、装置及计算机可读存储介质。
背景技术:
1、信息物理系统(cyber-physical systems,cps)由执行器、传感器、控制器以及被控对象组成,利用物理组件和网络的连接性来协同传输和处理数据。cps系统将传感、控制、通信和计算无缝集成,应用于智能电网、智能交通和环境检测等多个领域,例如,在电力系统中,发电机、变压器、输电线路、开关设备、传感器和执行器作为物理组件,计算机、服务器和数据存储设备等作为计算组件,由通信网络将物理组件和计算组件连接在一起,实现数据的实时传输和共享,从而实现对电力系统的检测、控制、优化和保护。随着cps系统的应用越来越广泛,其安全问题也日益受到重视。
2、现有的cps系统远程状态估计方法先将cps系统中各个传感器的测量数据转换为系统状态估计数据,通过对各个传感器对应的系统状态估计数据进行聚类,从而将传感器划分为受到攻击簇和未受到攻击簇,通过检测cps系统中的传感器是否受到攻击,从而判定cps系统是否受到恶意攻击。
3、但是,对于一些cps系统来说,不仅需要检测出系统是否受到恶意攻击,还需要能够在部分传感器受到攻击且数据被纂改的情况下,仍然可以基于各个传感器的测量数据融合出cps系统状态数据;例如在工业生产cps系统中,实时性和准确性是确保生产安全、提高生产效率的关键因素,当工业控制系统受到恶意攻击时,攻击者会纂改系统中部分传感器数据,导致控制系统收到错误的信息,从而做出错误的决策,比如在化工生产过程中,当温度、压力或流量等关键参数被纂改时,如果无法通过被纂改数据得到相对准确和可靠的系统状态,控制系统就无法准确判断当前的生产状况和设备运行状态,从而无法调整温度和压力等生产参数,甚至导致设备损坏、生产事故或人员伤亡。
4、综上所述,现有的cps远程系统状态估计方法仅能通过检测cps系统中传感器的数据是否被纂改从而判断cps系统是否受到恶意攻击,无法基于纂改后的数据得到相对准确和可靠的系统状态,从而导致控制系统无法基于系统状态调整cps系统运行参数。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中的cps系统远程估计方法在检测到cps系统受到攻击后,无法基于纂改后的数据得到相对准确和可靠的系统状态,从而导致控制系统无法基于系统状态调整cps运行参数的问题。
2、为解决上述技术问题,本发明提供了一种cps系统远程状态估计方法,包括:
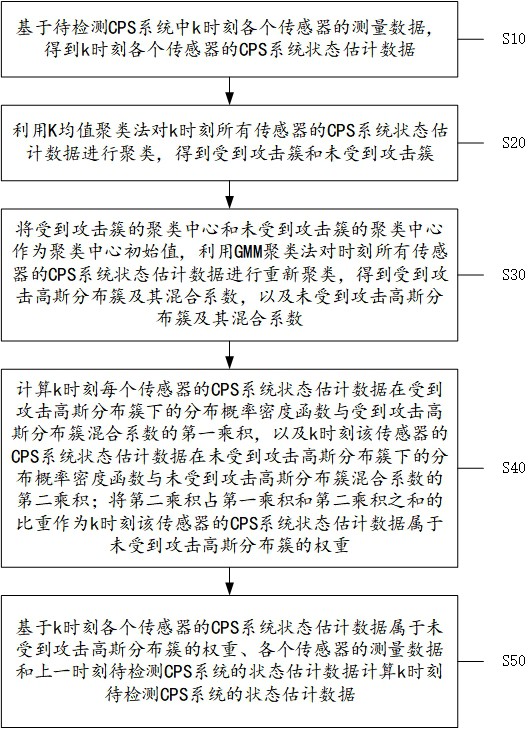
3、基于待检测cps系统中时刻各个传感器的测量数据,得到时刻各个传感器的cps系统状态估计数据;
4、利用k-means聚类法对时刻所有传感器的cps系统状态估计数据进行聚类,得到受到攻击簇和未受到攻击簇;
5、将受到攻击簇的聚类中心和未受到攻击簇的聚类中心作为聚类中心初始值,利用gmm聚类法对时刻所有传感器的cps系统状态估计数据进行重新聚类,得到受到攻击高斯分布簇及其混合系数,以及未受到攻击高斯分布簇及其混合系数;
6、计算时刻每个传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度函数与受到攻击高斯分布簇混合系数的第一乘积,以及时刻该传感器的cps系统状态估计数据在未受到攻击高斯分布簇下的分布概率密度函数与未受到攻击高斯分布簇混合系数的第二乘积;将所述第二乘积占所述第一乘积和所述第二乘积之和的比重作为时刻该传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重;
7、基于时刻各个传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重、时刻各个传感器的测量数据和时刻待检测cps系统的状态估计数据计算时刻待检测cps系统的状态估计数据。
8、优选地,时刻传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重的计算公式为:
9、,
10、其中,表示时刻第个传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的未受到攻击高斯分布簇的混合系数;表示时刻第个传感器的cps系统状态估计数据在未受到攻击高斯分布簇下的分布概率密度函数;表示时刻第个传感器的cps系统状态估计数据;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的未受到攻击高斯分布簇的均值;表示时刻第个传感器的估计误差协方差矩阵;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的受到攻击高斯分布簇的混合系数;表示时刻第个传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度函数;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的受到攻击高斯分布簇的均值;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的受到攻击高斯分布簇的协方差。
11、优选地,时刻待检测cps系统的状态估计数据表示为:
12、,
13、其中,表示时刻待检测cps系统的状态估计数据;表示时刻待检测cps系统的状态估计数据;表示待检测cps系统中的传感器数量;表示时刻第个传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重;表示时刻待检测cps系统的估计误差协方差矩阵;表示第个传感器的观测矩阵,表示矩阵的转置;表示第个传感器的测量噪声协方差矩阵的逆矩阵;表示时刻第个传感器的测量数据;表示待检测cps系统过程矩阵。
14、优选地,时刻传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度函数的计算公式为:
15、,
16、其中,表示时刻第个传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度函数;表示时刻第个传感器的cps系统状态估计数据;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的受到攻击高斯分布簇的均值;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的受到攻击高斯分布簇的协方差;表示时刻第个传感器的cps系统状态估计数据的维度;表示矩阵的转置。
17、优选地,时刻传感器的cps系统状态估计数据在未受到攻击高斯分布簇下的分布概率密度函数的计算公式为:
18、,
19、其中,表示时刻第个传感器的cps系统状态估计数据在未受到攻击高斯分布簇下的分布概率密度函数;表示时刻第个传感器的cps系统状态估计数据;表示对时刻所有传感器的cps系统状态估计数据进行重新聚类后得到的未受到攻击高斯分布簇的均值;表示时刻第个传感器的估计误差协方差矩阵;表示时刻第个传感器的cps系统状态估计数据的维度;表示矩阵的转置。
20、优选地,基于待检测cps系统中时刻各个传感器的测量数据,得到时刻各个传感器的cps系统状态估计数据包括:
21、构建待检测cps系统的线性时不变状态空间模型;
22、利用卡尔曼滤波器基于所述线性时不变状态空间模型和时刻各个传感器的测量数据,得到时刻各个传感器的cps系统状态估计数据。
23、优选地,所述待检测cps系统的线性时不变状态空间模型表示为:
24、,
25、,
26、其中,表示时刻待检测cps系统的状态向量;表示待检测cps系统的过程矩阵;表示时刻待检测cps系统的状态向量;表示时刻的过程噪声;表示时刻第个传感器的测量数据;表示第个传感器的观测矩阵;表示时刻第个传感器的噪声。
27、优选地,得到时刻各个传感器的cps系统状态估计数据后还包括:利用核主成分分析法或变分自编码器对时刻各个传感器的cps系统状态估计数据进行降维。
28、本发明还提供了一种cps系统远程状态估计装置,包括:
29、数据估计模块,用于基于待检测cps系统中时刻各个传感器的测量数据,得到时刻各个传感器的cps系统状态估计数据;
30、k-means聚类模块,用于利用k-means聚类法对时刻所有传感器的cps系统状态估计数据进行聚类,得到受到攻击簇和未受到攻击簇;
31、gmm聚类模块,用于将受到攻击簇的聚类中心和未受到攻击簇的聚类中心作为聚类中心初始值,利用gmm聚类法对时刻所有传感器的cps系统状态估计数据进行重新聚类,得到受到攻击高斯分布簇及其混合系数,以及未受到攻击高斯分布簇及其混合系数;
32、权重计算模块,用于计算时刻每个传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度函数与受到攻击高斯分布簇混合系数的第一乘积,以及时刻该传感器的cps系统状态估计数据在未受到攻击高斯分布簇下的分布概率密度函数与未受到攻击高斯分布簇混合系数的第二乘积;将所述第二乘积占所述第一乘积和所述第二乘积之和的比重作为时刻该传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重;
33、cps系统状态估计模块,用于基于时刻各个传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重、时刻各个传感器的测量数据和时刻待检测cps系统的状态估计数据计算时刻待检测cps系统的状态估计数据。
34、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述cps系统远程状态估计方法的步骤。
35、本发明提供的cps系统远程状态估计方法在对各个传感器的cps系统状态估计数据进行聚类得到受到攻击簇和未受到攻击簇后,再次使用gmm聚类法对所有传感器的cps系统状态估计数据进行重新聚类,得到受到攻击高斯分布簇及其混合系数、未受到攻击高斯分布簇及其混合系数,以及每个传感器的cps系统状态估计数据在受到攻击高斯分布簇下的分布概率密度和未受到攻击高斯分布簇下的分布概率密度,从而计算得到每个传感器的cps系统状态估计数据属于未受到攻击高斯分布簇的权重,由于传感器受到恶意攻击的可能性越小,表示该传感器的测量数据越准确,其对应的cps系统状态估计数据也更准确,可信度更高,因此,通过计算权重值反映各个传感器的cps系统状态估计数据的可信度后,在对所有传感器的数据进行融合计算cps系统状态估计数据时,重点关注未受到攻击传感器的测量数据,使得融合后的cps系统状态估计数据能够较为准确地反映系统当前运行状况,从而为调整系统cps系统运行参数提供可靠依据。
本文地址:https://www.jishuxx.com/zhuanli/20240801/244271.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。