一种无人机辅助的实时持续数据采集轨迹优化方法及系统
- 国知局
- 2024-08-02 14:58:32
本发明属于传感器网络数据采集和无人机轨迹规划领域,具体涉及一种无人机辅助的实时持续数据采集轨迹优化方法及系统。
背景技术:
1、由于无人机的高灵活性、低成本和增强的通信能力等优点,使得无人机被广泛应用于的传感器数据采集等场景中。无人机可以根据通信需求动态的调整飞行轨迹使其更靠近被采集的设备,从而提高数据采集的效率。在持久性的数据采集任务中如军事侦察、灾后救援、工业物联网等,连续实时的监测数据对于环境变化的快速响应、应对策略的高效制定起到了至关重要的作用。
2、无人机辅助的数据采集的相关研究主要聚焦于单次采集任务中数据传输性能的优化,而无人机有限的电池容量使得其无法执行持久性的连续采集任务(如灾情监测和灾后救援等)。近年来无人机充电技术的发展,使得无人机可以进行更长时间不间断的工作。其中传统的充电桩站、换电站的充电方式需要人工辅助,激光无线充电的部署成本较高且存在安全隐患,微波无线充电的功率较低,更适合给低功耗设备充电,而近距离感应式无线充电方式具有充电效率高、自动化程度高以及部署方便的优点,配备无线能量传输(wireless power transfer,wpt)模块的无人机可以飞往附近的充电平台自动充电,平台可以安装在信号塔、电线杆、屋顶等处。通过部署无线充电平台,使得无人机可以连续不断的在任务区域内的进行数据采集。
技术实现思路
1、针对无线传感网实时持续数据采集的需求,本发明提供一种无人机辅助的实时持续数据采集轨迹优化方法及系统。
2、本发明方法的具体技术方案为一种无人机辅助的实时持续数据采集轨迹优化方法,包括以下具体步骤:
3、步骤1:针对无线传感器网络数据采集场景,部署感应式无线充电平台,建立可充电无人机辅助的数据采集的系统模型,构建周期数据采集时间最小化问题;
4、步骤2:将周期数据采集完成时间最小化问题分解为无人机数据采集轨迹优化子问题和节点聚类和节点访问顺序优化子问题:
5、步骤3:求解无人机数据采集轨迹优化子问题;
6、步骤4:求解节点聚类和节点访问顺序优化子问题;
7、步骤5:求解步骤1中构建的周期数据采集时间最小化问题;
8、作为优选,步骤1所述建立可充电无人机辅助的数据采集的系统模型,具体如下:
9、设任务区域共有k个传感器节点,用集合表示,每个节点的坐标为
10、其中,表示2维的实数向量空间,无线充电平台的坐标为无线充电平台的高度为hc;
11、无人机从充电平台处起飞,采集任务区域内的传感器节点数据,当能量不足时,返回至充电平台处,降落到充电平台上进行充电,充至满电后再次起飞采集剩余传感器节点数据,直至将所有传感器节点数据采集完毕,再进入下一轮的数据采集;
12、设在一轮数据采集中无人机需要返回充电n次,则任务区域内的节点可以被分为n个互不重叠的节点组,可表示为
13、其中,gn表示第n组节点,表示n组节点的并集;
14、则无人机采集第n组传感器节点的数据的时间包括起飞时间、飞行时间、降落时间、充电时间;
15、第n组传感器节点的时间起飞与第n组传感器节点的降落时间之和为:
16、tn,ad=2(h-hc)/va
17、其中,h表示无人机的飞行高度,va表示无人机垂直飞行的速度,hc为无线充电平台的高度;
18、第n组传感器节点的消耗的能耗、第n组传感器节点的消耗的能耗之和为:
19、en,ad=pa(va)tn,ad
20、其中,va表示无人机垂直飞行的速度,pa表示无人机垂直飞行的功率,是垂直飞行速度的函数:
21、
22、其中,w表示无人机的重量,r表示空气密度,a表示桨叶面积;
23、第n组传感器节点的飞行时间划分为:
24、第n组传感器节点通信范围内的飞行时间tn,com、第n组传感器节点节点通信范围外的飞行时间tn,fly;
25、第n组传感器节点通信范围内的飞行时间tn,com,计算如下:
26、
27、其中,|gn|表示第n组节点数量,m表示无人机在一个节点通信范围内的轨迹段数,tn,l[m]表示无人机在第n组节点的第l个节点通信范围内的第m段上的飞行时间;
28、无人机在第n组节点的第l个节点通信范围内采集的数据量表示为:
29、
30、γ0=ptb0/s2
31、其中,b表示通信带宽,pt表示传感器节点的发射功率,b0表示单位距离的参考信道增益,s2表示信道噪声功率,γ0表示单位参考距离下的信噪比,qn,l[m]表示无人机在第n组节点的第l个节点通信范围内的轨迹点,wn,l表示第n组节点的第l个节点的坐标;
32、第n组传感器节点通信范围外的飞行时间为tn,fly,其计算方式如下:
33、
34、其中,vf表示无人机的飞行速度,q[m]和q[0]分别表示无人机在节点通信范围的出点和入点,πn(l)表示无人机在第n组节点中的采集顺序,其中πn(0)和πn(|gn|+1)都表示充电平台,表示无人机在第n组节点的第l个节点的通信范围的出点,表示无人机在第n组节点的第l+1个节点的通信范围的入点;
35、无人机在水平方向飞行时的功率为水平飞行速度的函数:
36、
37、其中,p0和pi分别表示叶片廓形功率和诱导功率,utip表示叶片的叶尖速度,v0表示悬停时平均旋翼诱导速度,d0和s表示机身阻力比和转子坚固度,同样,ρ表示空气密度,a表示桨叶面积;
38、则无人机在采集第n组传感器节点的数据时的飞行能耗包括:
39、
40、en,fly=p(vf)tn,fly
41、其中,en,com表示节点通信范围内的飞行能耗,en,fly表示节点通信范围外的飞行能耗,zn,l[m]表示无人机在第n组节点的第l个节点通信范围内的第m段上的飞行距离;
42、第n组传感器节点的充电时间为:
43、tn,chg=en,tot/pc
44、en,tot=en,ad+en,com+en,fly
45、其中,tn,chg表示无人机在采集第n组传感器节点后的充电时间,en,tot表示无人机采集第n组节点的总能耗,en,ad表示无人机在采集第n组传感器节点时起飞和降落过程的能耗,en,com表示无人机在采集第n组传感器节点时节点通信范围内的飞行能耗,en,fly表示无人机在采集第n组传感器节点时节点通信范围外的飞行能耗,pc表示充电平台的充电功率;
46、第n组节点数据采集的总时间为tn,tot:
47、tn,tot=tn,ad+tn,com+tn,fly+tn,chg
48、其中,tn,ad表示无人机在采集第n组传感器节点时起飞和降落过程的时间,tn,com表示无人机在采集第n组传感器节点时节点通信范围内的飞行时间,tn,fly表示无人机在采集第n组传感器节点时节点通信范围外的飞行时间,tn,chg表示无人机在采集第n组传感器节点后的充电时间。
49、步骤1所述构建周期数据采集时间最小化问题,具体如下:
50、
51、其中,n表示节点分组数,xn,k表示节点k是否属于第n组,πn(l)表示第n组第l个节点访问顺序,qn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m个轨迹点,tn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m段轨迹的飞行时间,tn,tot为第n组节点数据采集的总时间;
52、所述传感器节点的通信数据量约束条件,具体如下:
53、
54、其中,b表示通信带宽,γ0表示单位参考距离下的信噪比,h为无人机飞行高度,qn,l为第n组节点的第l个节点的通信数据量,qn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m个轨迹点,wn,l表示第n组节点的第l个节点的坐标,gn表示第n组节点集合;
55、所述传感器节点的通信半径约束条件,具体如下:
56、
57、其中,qn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m个轨迹点,wn,l表示第n组节点的第l个节点的坐标,dth为传感器节点通信半径;
58、所述无人机的飞行速度约束条件,具体如下:
59、
60、其中,qn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m个轨迹点,qn,l[m-1]为无人机在第n组节点的第l个节点通信范围内的第m-1个轨迹点,δmax表示无人机在节点通信范围内的每一小段轨迹的最大长度,vmax表示无人机的最大飞行速度,tn,l[m]表示无人机在第n组节点的第l个节点通信范围内的第m段轨迹的飞行时间;
61、所述无人机的加速度约束条件,具体如下:
62、
63、其中,zn,l[m]表示表示无人机在第n组节点的第l个节点通信范围内的第m段轨迹的飞行距离,tn,l[m]表示无人机在第n组节点的第l个节点通信范围内的第m段轨迹的飞行时间,amax表示无人机的最大加速度;
64、所述无人机的加速度约束条件,具体如下:
65、
66、其中,zn,l[0]表示表示无人机在第n组节点的第l个节点通信范围内的第1段轨迹的飞行距离,tn,l[0]表示无人机在第n组节点的第l个节点通信范围内的第1段轨迹的飞行时间,vf表示无人机的飞行速度,amax表示无人机的最大加速度;
67、所述无人机的加速度约束条件,具体如下:
68、
69、其中,zn,l[m]表示表示无人机在第n组节点的第l个节点通信范围内的最后一段轨迹的飞行距离,tn,l[m]表示无人机在第n组节点的第l个节点通信范围内的最后一段轨迹的飞行时间,vf表示无人机的飞行速度,amax表示无人机的最大加速度;
70、所述无人机的电量约束条件,具体如下:
71、
72、其中,en,tot表示无人机采集第n组节点消耗的总能量,euav表示无人机的总电量。
73、所述节点访问顺序的约束条件,具体如下:
74、
75、其中,|gn|表示第n组节点的数量,πn(1),πn(2),...,πn(|gn|)分别表示第n组节点的第1个、第2个…至最后一个被采集的节点的标号,pn表示第n组节点所有可能被采集的顺序的集合;
76、所述节点分组的约束条件,具体如下:
77、
78、其中,gn表示第n组节点集合,k表示节点标号,xn,k表示节点k是否属于第n组;
79、所述节点分组的约束条件,具体如下:
80、
81、其中,xn,k表示节点k是否属于第n组,xn,k=1表示属于,xn,k=0表示不属于;
82、所述节点分组的约束条件,具体如下:
83、
84、其中,xn,k表示节点k是否属于第n组,xn,k=1表示属于,xn,k=0表示不属于;
85、所述传感器节点的通信数据量约束条件表示每个节点被采集的数据量至少为q;
86、所述传感器节点的通信半径约束条件表示无人机在采集数据时必须在节点的通信范围内;
87、dth为节点的通信半径;
88、所述无人机的飞行速度约束条件表示无人机在节点通信范围内的每个轨迹段的长度不超过设定阈值;
89、所述无人机的加速度约束条件表示任意相邻两段轨迹之间的速度差不超过amax;
90、所述无人机的电量约束条件表示无人机采集一组节点的能耗不超过自身电量;
91、所述节点访问顺序的约束条件表示第n组节点所有可能的采集顺序;
92、所述节点分组的约束条件表示一个传感器节点只能在一个组中;
93、作为优选,所述步骤2具体如下:
94、无人机数据采集轨迹优化子问题:
95、
96、其中,qn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m个轨迹点,tn,l[m]为无人机在第n组节点的第l个节点通信范围内的第m段轨迹的飞行时间,tn,tot为第n组节点数据采集的总时间。
97、所述无人机数据采集轨迹优化子问题应满足所述传感器节点的通信数据量约束条件、所述传感器节点的通信半径约束条件、所述无人机的飞行速度约束条件、所述无人机的加速度约束条件和所述无人机的电量约束条件。
98、节点聚类和节点访问顺序优化子问题:
99、
100、其中,n表示节点分组数,xn,k表示节点k是否属于第n组,πn(l)表示第n组第l个节点访问顺序,vf表示无人机的飞行速度,p(vf)表示无人机的飞行功率,pc表示无线充电平台的充电功率,dn表示无人机在采集第n组节点数据时在节点通信范围外的飞行距离,t0表示无人机采集一组节点数据消耗的起飞和降落的时间。
101、所述节点聚类和节点访问顺序优化子问题应满足所述节点访问顺序的约束条件和所述节点分组的约束条件。
102、作为优选,所述步骤3具体如下:
103、步骤3.1:引入松弛变量;
104、所述松弛变量包括:yl[m],al[m],dl[m]和vl[m];
105、
106、
107、dl[m]=‖ql[m]-wl‖
108、
109、其中,yl[m]为无人机诱导功率的系数,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,zl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行距离,v0为无人机悬停时平均旋翼诱导速度,为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,γ0为参考距离下的信噪比,h为无人机的飞行高度,dl[m]为无人机在第l个点的通信范围内的第m个轨迹点与第l个节点的距离,ql[m]为无人机在第l个点的通信范围内的第m个轨迹点的坐标,wl为第l个节点的坐标,vl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行速度。
110、则无人机数据采集轨迹优化子问题转化为:
111、
112、其中,ql[m]为无人机在第l个点的通信范围内的第m个轨迹点的坐标,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,yl[m]为无人机诱导功率的系数,为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,dl[m]为无人机在第l个点的通信范围内的第m个轨迹点与第l个节点的距离,vl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行速度,ttot为总时长。
113、应满足以下约束条件:所述传感器节点的通信半径约束条件、所述无人机的飞行速度约束条件、所述无人机的加速度约束条件和所述无人机的电量约束条件。
114、所述无人机功率的约束条件,具体如下:
115、
116、其中,yl[m]为无人机诱导功率的系数,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,zl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行距离,v0为无人机悬停时平均旋翼诱导速度;
117、所述传感器节点通信数据量的约束条件,具体如下:
118、
119、其中,为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,ql为第l个节点需要上传的数据量,b为通信带宽;
120、所述通信速率的约束条件,具体如下:
121、
122、其中,为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,γ0为参考距离下的信噪比,h为无人机的飞行高度,dl[m]为无人机在第l个点的通信范围内的第m个轨迹点与第l个节点的距离;
123、所述无人机与传感器节点的距离的约束条件,具体如下:
124、
125、其中,ql[m]为无人机在第l个点的通信范围内的第m个轨迹点的坐标,wl为第l个节点的坐标,dl[m]为无人机在第l个点的通信范围内的第m个轨迹点与第l个节点的距离;
126、所述无人机加速度的约束条件,具体如下:
127、
128、其中,vl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行速度,amax为无人机的最大加速度;
129、所述无人机速度的约束条件,具体如下:
130、
131、其中,vl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行速度,zl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行距离,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间。
132、步骤3.2:对所述无人机功率的约束条件、所述传感器节点通信数据量的约束条件、所述通信速率的约束条件和所述无人机速度的约束条件进行一阶泰勒展开后:
133、所述变形后的无人机功率的约束条件,具体如下:
134、
135、其中,yl[m]为无人机诱导功率的系数,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,zl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行距离,v0为无人机悬停时平均旋翼诱导速度,为yl[m]在第i次迭代时的取值,为zl[m]在第i次迭代时的取值;
136、所述变形后的传感器节点通信数据量的约束条件,具体如下:
137、
138、其中,为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,ql为第l个节点需要上传的数据量,b为通信带宽,为al[m]在第i次迭代时的取值;
139、所述变形后的通信速率的约束条件,具体如下:
140、
141、其中,al2[m]为无人机在第l个点的通信范围内的轨迹的第m段在单位带宽下采集的数据量,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,γ0为参考距离下的信噪比,h为无人机的飞行高度,dl[m]为无人机在第l个点的通信范围内的第m个轨迹点与第l个节点的距离,为dl[m]在第i次迭代时的取值;
142、所述变形后的无人机速度的约束条件,具体如下:
143、
144、其中,vl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行速度,zl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行距离,tl[m]为无人机在第l个点的通信范围内的轨迹的第m段的飞行时间,为vl[m]在第i次迭代时的取值,为tl[m]在第i次迭代时的取值;
145、由于上述问题为一个凸优化问题,因此可以通过凸优化工具进行求解。
146、作为优选,所述步骤4具体如下:
147、步骤4.1:设充电次数的上界为nlb=k,下界为nub=1,初始化充电次数为
148、步骤4.2:在给定充电次数n的情况下,将所述无人机的电量约束条件通过罚函数法添加到求解节点聚类和节点访问轨迹优化子问题的目标函数中:
149、
150、其中,xn,k表示节点k是否属于第n组,πn(l)表示第n组第l个节点访问顺序,vf表示无人机的飞行速度,p(vf)表示无人机的飞行功率,pc表示无线充电平台的充电功率,dn表示无人机在采集第n组节点数据时在节点通信范围外的飞行距离,t0表示无人机采集一组节点数据消耗的起飞和降落的时间,∈为惩罚因子,定义为一个很大的正数,euav为无人机的总能量,en,com为无人机采集第n组节点时的通信能耗,en,ad为无人机采集第n组节点时的起飞和降落的能耗。
151、满足约束条件:所述节点访问顺序约束条件和所述节点分组约束条件。
152、步骤4.3:通过遗传算法进行求解,求解得到的目标函数值为pn
153、步骤4.4:设pk为充电次数为k时得到的上述问题的目标函数,则当pn≤pk时,更新nub=n,否则更新nlb=n;
154、步骤4.5:令返回步骤4.2进行循环,直到nub-nlb≤1,退出循环;
155、作为优选,所述步骤5具体如下:
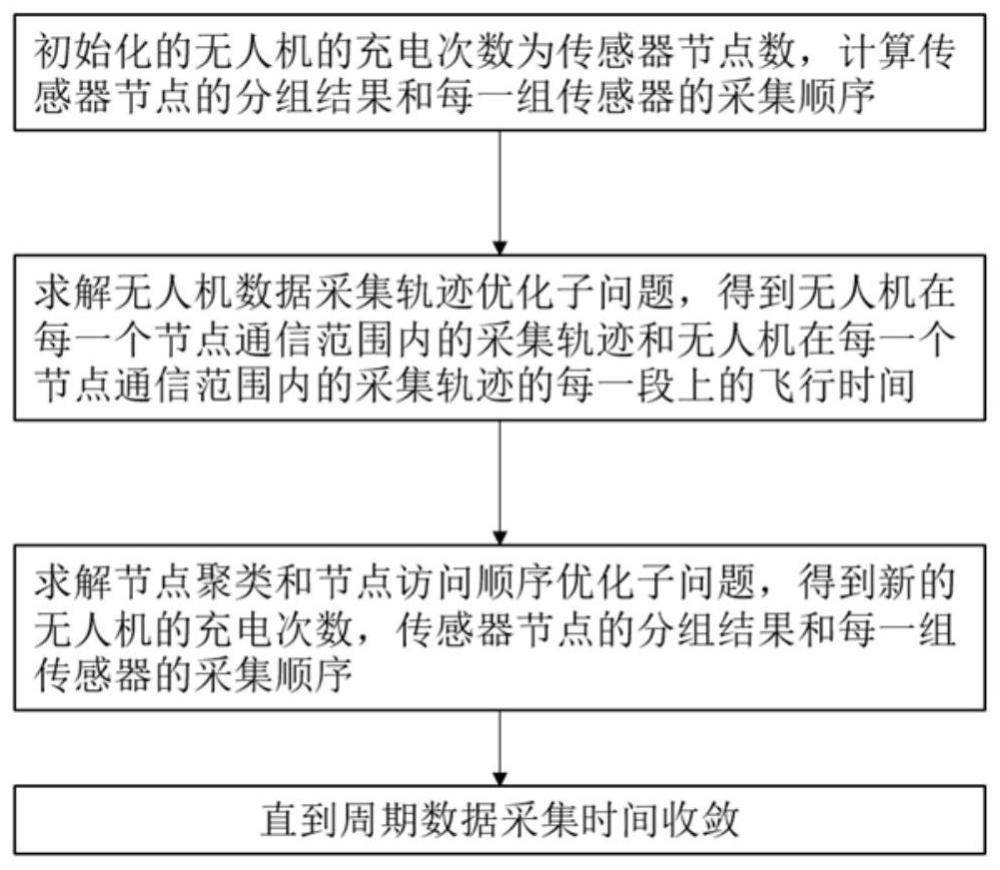
156、步骤5.1:初始化的无人机的充电次数为传感器节点数,计算传感器节点的分组结果和每一组传感器的采集顺序;
157、步骤5.2:通过步骤3求解无人机数据采集轨迹优化子问题,得到无人机在每一个节点通信范围内的采集轨迹和无人机在每一个节点通信范围内的采集轨迹的每一段上的飞行时间;
158、步骤5.3:通过步骤4求解节点聚类和节点访问顺序优化子问题,得到新的无人机的充电次数,传感器节点的分组结果和每一组传感器的采集顺序;
159、步骤5.4:返回步骤5.2进行循环,直到步骤1中构建的周期数据采集时间最小化问题的目标函数收敛。
160、本发明还提供了一种无人机辅助的实时持续数据采集轨迹优化系统,包括:
161、所述时间最小化问题构建模块,用于针对无线传感器网络数据采集场景,部署感应式无线充电平台,建立可充电无人机辅助的数据采集的系统模型,构建周期数据采集时间最小化问题;
162、所述子优化问题分解模块,用于将周期数据采集完成时间最小化问题分解为将周期数据采集完成时间最小化问题分解为无人机数据采集轨迹优化子问题和节点聚类和节点访问顺序优化子问题:
163、所述轨迹优化子问题求解模块,用于求解无人机数据采集轨迹优化子问题;
164、所述访问顺序子问题求解模块,用于求解节点聚类和节点访问顺序优化子问题;
165、所述时间最小化问题求解模块,用于求解步骤1中构建周期数据采集时间最小化问题;
166、本发明优点在于,通过在任务区域部署感应式无线充电平台,从而为无人机补充能量,基于此构建完成时间最小化问题并将该问题分解为无人机数据采集轨迹优化问题和节点聚类和节点访问顺序优化问题,通过基于连续凸优化的算法对无人机在传感器节点范围内的轨迹进行优化,通过二分搜索和遗传算法对传感器节点聚类和节点访问顺序进行优化,并基于上述两个算法的交替优化,对无人机的数据采集轨迹进行优化,最终在保证可以持续进行数据采集的前提下降低了数据采集的时间,提高了数据采集的实时性。
本文地址:https://www.jishuxx.com/zhuanli/20240801/244519.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表