一种基于多相机的无人机成像方法及系统与流程
- 国知局
- 2024-08-02 14:58:59
本发明涉及图像处理,特别是一种基于多相机的无人机成像方法及系统。
背景技术:
1、目前,在无人机进行全向避障,主要采用如下方式进行成像:1、多路针孔成像,但是其视场角过小,存在盲区,且成像为黑白图像,无法直观区分不同的目标;2、鱼眼成像,其视场角相对多路针孔成像大,但无法获取远距离目标图像,并且在使用卷帘快门(rollingshutter)时,容易产生果冻效应,导致图像扭曲,影响目标识别。
技术实现思路
1、为解决上述问题,本发明提出一种基于多相机的无人机成像方法及系统,其可全方位获取环境图像,实现全向避障检测,再将图像通过拼接、分割、校正后,获得rgb彩色图像,由此可通过彩色图像更加直观的观察到不同的目标,便于对其进行准确的区分,同时还可以解决图像果冻扭曲问题。
2、为实现上述目的,本发明采用的技术方案是:
3、一方面,提供了一种基于多相机的无人机成像方法,其包括如下步骤:
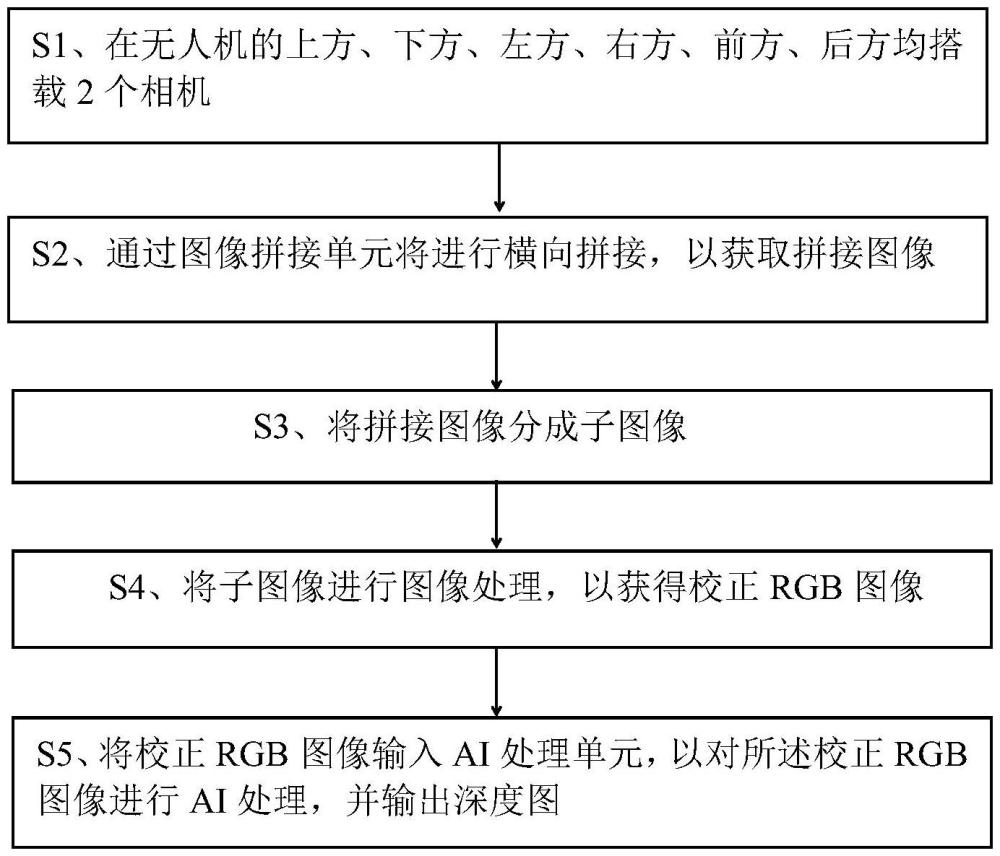
4、s1、在无人机的上方搭载第一上视相机、第二上视相机,下方搭载第一下视相机、第二下视相机,左方搭载第一左视相机、第二左视相机,右方搭载第一右视相机、第二右视相机,前方搭载第一前视相机、第二前视相机,后方搭载第一后视相机、第二后视相机;
5、所述第一上视相机、第二上视相机分别对应获取第一上视图像、第二上视图像,第一下视相机、第二下视相机分别对应获取第一下视图像、第二下视图像,第一左视相机、第二左视相机分别对应获取第一左视图像、第二左视图像,第一右视相机、第二右视相机分别对应获取第一右视图像、第二右视图像,第一前视相机、第二前视相机分别对应获取第一前视图像、第二前视图像,第一后视相机、第二后视相机分别对应获取第一后视图像、第二后视图像;
6、s2、将第一上视图像、第二上视图像、第一下视图像、第二下视图像进行横向拼接,以获取第一拼接图像;
7、以及,将第一左视图像、第二左视图像、第一右视图像、第二右视图像进行横向拼接,以获取第二拼接图像;
8、以及,将第一前视图像、第二前视图像、第一后视图像、第二后视图像进行横向拼接,以获取第三拼接图像;
9、s3、将第一拼接图像输入第一图像采集模块,再将所述第一拼接图像分成包括第一上视图像、第二上视图像的上视子图像,以及包括第一下视图像、第二下视图像的下视子图像;
10、将第二拼接图像输入第二图像采集模块,再将所述第二拼接图像分成包括第一左视图像、第二左视图像的左视子图像,以及包括第一右视图像、第二右视图像的右视子图像;
11、以及将第三拼接图像输入第三图像采集模块,再将所述第三拼接图像分成包括第一前视图像、第二前视图像的前视子图像,以及包括第一后视图像、第二后视图像的后视子图像;
12、s4、将上视子图像、下视子图像、左视子图像、右视子图像、前视子图像、后视子图像均进行图像处理,以获得校正rgb图像;
13、以及s5、将所述校正rgb图像输入ai处理单元,以对所述校正rgb图像进行ai处理,并输出深度图,本实施例中,所述ai处理包括基于神经网络模型对图像进行训练。
14、优选的,每一相机镜头的水平视场角均大于或等于110°,垂直视场角均大于或等于90°,对角视场角均大于或等于140°。
15、优选的,获取第一拼接图像/第二拼接图像/第三拼接图像的过程中,在对不同图像进行横向拼接时,将不同图像按照预定顺序进行排列,且将不同图像的像素逐行对齐,再进行图像横向拼接。
16、优选的,所述图像处理包括如下步骤:
17、将子图像输入isp处理模块,通过所述isp处理模块对同一子图像中的两个图像均进行isp处理,以获得彩色图像;
18、将所述彩色图像输入图像转换单元,通过所述图像转换单元将彩色图像转换为rgb图像;
19、将rgb图像输入图像校正单元,所述图像校正单元通过remap表对rgb图像的r、g、b三个分量进行remp校正处理,以获得校正rgb图像。
20、优选的,所述isp处理包括曝光、增益、gamma处理中的一种或几种。
21、优选的,对同一子图像中的两个图像的isp处理方式相同。
22、优选的,所述彩色图像包括yuv420图像。
23、优选的,所述图像转换单元、图像校正单元均集成于一个dsp单元上,且上视子图像、下视子图像、左视子图像、右视子图像、前视子图像、后视子图像至少在2个dsp单元上完成图像转换以及remp校正处理。
24、还提供一种基于多相机的无人机成像系统,其包括:
25、第一上视相机、第二上视相机,其均搭载在无人机的上方;
26、第一下视相机、第二下视相机,其均搭载在无人机的下方;
27、第一左视相机、第二左视相机,其均搭载在无人机的左方;
28、第一右视相机、第二右视相机,其均搭载在无人机的右方;
29、第一前视相机、第二前视相机,其均搭载在无人机的前方;
30、第一后视相机、第二后视相机,其均搭载在无人机的后方;
31、图像拼接单元,其用于将第一上视图像、第二上视图像、第一下视图像、第二下视图像进行横向拼接,以获取第一拼接图像;以及,将第一左视图像、第二左视图像、第一右视图像、第二右视图像进行横向拼接,以获取第二拼接图像;以及,将第一前视图像、第二前视图像、第一后视图像、第二后视图像进行横向拼接,以获取第三拼接图像;
32、图像采集单元,其用于接收第一拼接图像、第二拼接图像、第三拼接图像;具体的,所述图像采集单元包括:第一图像采集模块、第二图像采集模块、第三图像采集模块,其分别对应接收第一拼接图像、第二拼接图像、第三拼接图像;
33、图像分割单元,其用于对第一拼接图像、第二拼接图像、第三拼接图像进行分割,以将所述第一拼接图像分成包括第一上视图像、第二上视图像的上视子图像,以及包括第一下视图像、第二下视图像的下视子图像,将所述第二拼接图像分成包括第一左视图像、第二左视图像的左视子图像,以及包括第一右视图像、第二右视图像的右视子图像,以及将第三拼接图像分成包括第一前视图像、第二前视图像的前视子图像,以及包括第一后视图像、第二后视图像的后视子图像;
34、isp处理模块,其用于对子图像进行isp处理,以获得彩色图像;
35、图像转换单元,其用于将彩色图像转换为rgb图像;
36、图像校正单元,其用于通过remap表对rgb图像的r、g、b三个分量进行remp校正处理,以获得校正rgb图像;
37、ai处理单元,其用于对所述校正rgb图像进行ai处理,并输出深度图。
38、优选的,包括:所述图像拼接单元包括asci芯片、fpga模块中的一种或几种。
39、使用本发明的有益效果是:
40、本技术中,无人机各方向均搭载有2个相机,因此可全方位获取环境图像,实现全向避障检测,再将图像通过拼接、分割、校正后,获得rgb彩色图像,由此可通过彩色图像更加直观的观察到不同的目标,同时还可以解决图像果冻扭曲问题。
本文地址:https://www.jishuxx.com/zhuanli/20240801/244554.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表