一种自动校准的狭缝涂布方法与流程
- 国知局
- 2024-08-02 15:18:09
本发明涉及及薄膜涂布相关,尤其涉及一种自动校准的狭缝涂布方法。
背景技术:
1、钙钛矿太阳电池(pscs)有着替代硅基太阳电池的巨大潜力,其在实验阶段有着显著成果。钙钛矿太阳能电池一般由透明导电基底、载流子传输层、钙钛矿层以及金属电极组成。钙钛矿层吸收光子,产生电子-空穴对。在室温下就能分离为自由的载流子,随后生成的自由载流子分别被传输层材料传输出去,再被电极收集,形成电流。但是钙钛矿太阳能电池在产业化的进程上仍旧面临巨大挑战,原因是目前市场还未存在针对钙钛矿电池的成熟镀膜设备。
2、钙钛矿层是钙钛矿太阳能电池的关键膜层,其膜层制备的均匀性将影响太阳能电池的效率。狭缝涂布设备可有效对钙钛矿膜层进行大面积制备。狭缝涂布技术作为一种精密的涂布技术,相比其它涂布方式,具有很多优点,如精度高、湿厚均匀。工作原理为涂布液在一定压力一定流量下沿着涂布刀头的缝隙挤压喷出而转移到基材上。
3、目前有以下校准背景:
4、1、首先,涂布刀头作为狭缝涂布设备镀膜关键器件,其精度决定了膜层质量的好坏。涂布头由三部分组成上模、下模以及安装在上模和下模之间的薄垫片。涂布过程中在压力作用下,钙钛矿溶液从上、下模之间的缝隙挤出,与移动的基材之间形成液珠并转移到基材表面,形成湿膜。涂布刀头的设计和调整直接影响着涂布质量,并且与涂布平台的平行度密切相关。如果涂布刀头唇缝宽度之间的偏差较大,可能会影响涂布质量和涂层厚度的一致性。
5、2、其次,狭缝涂布是一种精密的涂布技术,通常用于制备大面积钙钛矿薄膜。在钙钛矿太阳能电池制造过程中,导电玻璃基片厚度的不一致会影响整个工艺的重复性,因为导电玻璃基片厚度的差异会导致导电玻璃基片间的差异。因此,在制备钙钛矿薄层之前,需要对现有的工作台进行调试和校准以测定导电玻璃基片的厚度以满足现有工艺的需求。
6、此外,涂布平台作为支撑和移动基材的平台,导电玻璃基片厚度的测定不准确会导致在涂布过程中发生涂布刀头与导电玻璃基片发生“撞刀”现象,导致设备损坏以及产品废品率增加。
7、因此,涂布刀头唇缝宽度之间的偏差一致性和涂布导电玻璃基片厚度测量的准确性对于涂布质量和一致性起着至关重要的作用。通过确保适当的准确性,涂布机能够实现在基材表面制备出均匀、无缺陷的涂层,从而满足钙钛矿太阳能电池对于涂布质量和性能的要求。
8、针对于上述的其一校准背景,市面现有所有狭缝涂布刀头均为多个螺丝固定上模、下模以及安装在上模和下模之间的薄垫片组成。狭缝涂布刀头涂布尺寸约为30cm-1m,刀头尺寸越大,那么则所需要人为固定的螺丝越多。另外,狭缝涂布刀头唇缝宽度为0.05/0.08/0.1mm不等(由薄垫片厚度决定)。
9、针对于其二校准背景,目前的狭缝涂布机是在涂布刀头模块上安装了一块带有滑轨的平面板,然后在滑轨上安装了激光传感器,通过手动在多个位置取点并计算距离,来检测各个位置的高度,从而控制涂布升降吸附平台的高度,以提高测定导电玻璃基片厚度的准确性。
10、现有技术存在的问题:
11、针对于狭缝涂布刀头唇缝宽度检测:
12、1、在每次人为装配刀头后,存在不同位置的螺丝拧的深度不同,导致上模与下模受力不均引起的狭缝涂布刀头唇缝宽度偏差。当刀头唇缝宽度偏差,致使狭缝涂布刀头出液不均匀,大大影响了钙钛矿层的均匀性。
13、2、在此狭缝涂布刀头厚度下,人无法用肉眼观察出其唇缝宽度误差,无法修正人为偏差,也无矫正参考。
14、3、当涂布刀头唇缝存在加工误差形变或者长时间使用后的形变,无法人为观察出,也无矫正参考。
15、针对于导电玻璃基片厚度测定及防止涂布刀头撞刀:
16、1、这个过程需要人工调节激光传感器的位置并手动控制系统,以进行校准直到达到理想的效果。这导致每次实验前都需要花费大量时间进行调整,而且无法保证每次激光测试取点的位置一致,从而影响了实验结果和研发进度。
17、2、此外,涂布升降吸附平台需要额外定制,价格昂贵,而且直接在狭缝涂布机模头上安装滑轨和激光传感器会影响模头的涂布精度。
18、3、最重要的是,如果操作不当,涂布头可能会发生“撞刀”现象,导致设备损坏和产品废品率增加。
19、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种自动校准的狭缝涂布方法,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种自动校准的狭缝涂布方法。
2、为实现上述目的,本发明采用如下技术方案:
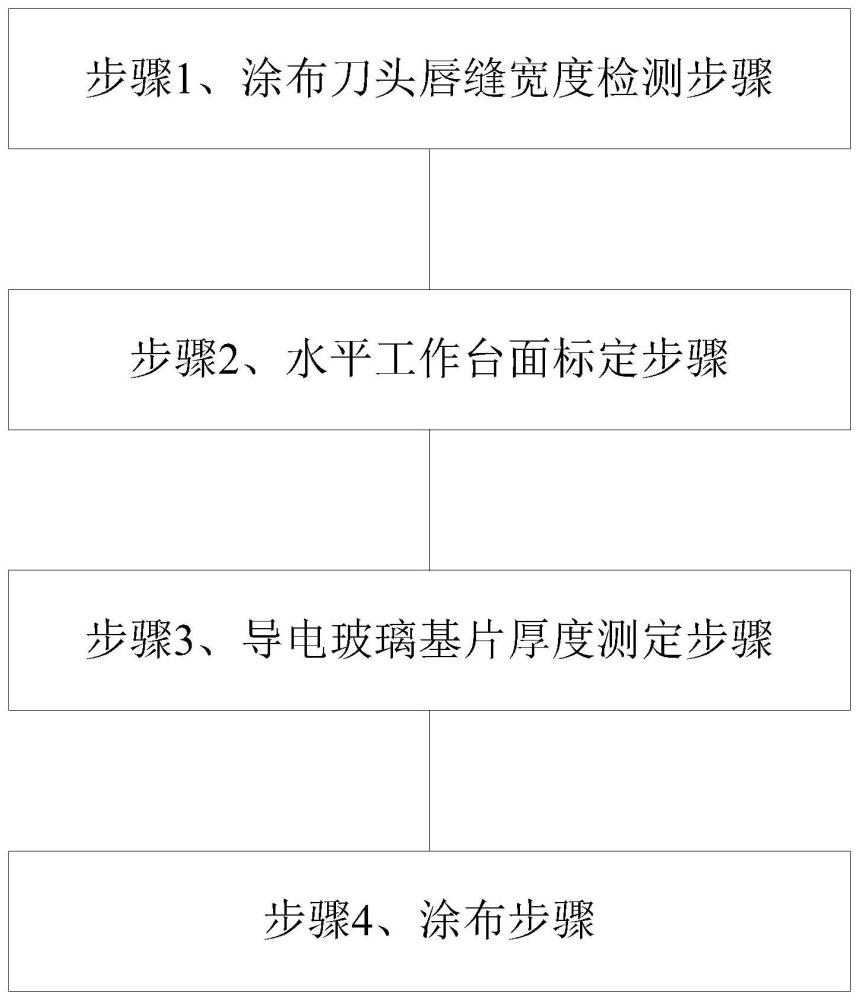
3、一种自动校准的狭缝涂布方法,依次包括以下步骤:
4、步骤1、涂布刀头唇缝宽度检测步骤:
5、涂布刀头沿着y轴方向且通过支架安装在水平平台工作面上,在涂布刀头正下方的水平平台工作面上安装有y轴直线电机,y轴直线电机可驱动检测相机沿着y轴方向移动;
6、涂布刀头由涂布刀头上模和涂布刀头下模组成,通过若干个涂布刀头螺丝固定涂布刀头上模和涂布刀头下模以及安装在涂布刀头上模和涂布刀头下模之间的涂布刀头薄垫片;
7、y轴直线电机驱动检测相机在y轴方向上往复运动,检测相机对涂布刀头唇缝进行连续飞拍,将多张照片进行合成,标定并检测唇缝宽度,并根据上述唇缝宽度数据,调节对应区域的涂布刀头螺丝的松紧,从而保证涂布刀头唇缝宽度的均匀性;
8、步骤2、水平工作台面标定步骤:
9、涂布刀头驱动模组沿着y轴方向且通过龙门架安装在水平平台工作面上,在涂布刀头驱动模组上靠近底部的位置沿着y轴方向安装有涂布刀头,在涂布刀头的下方设置有滑台,安装在水平平台工作面上的x轴导轨组件可驱动上方的滑台沿着x轴方向移动,在滑台上设置有大理石平台,在滑台沿着y轴正方向的一侧安装有第一激光位移传感器,在滑台沿着y轴负方向的一侧安装有第二激光位移传感器;
10、首先将标定块放在第一激光位移传感器的中心垂直方向上的正上方,第一激光位移传感器将对到标定块的下表面的距离进行测定,随之将标定块放置于第二激光位移传感器的中心垂直方向上的正上方进行对到标定块下表面距离的测定,对比所测定的两边距离示数的差值,并以此为一个固定值作为初始大理石平台的水平基准面,以保证测定导电玻璃基片厚度的准确性;
11、步骤3、导电玻璃基片厚度测定步骤:
12、在涂布刀头驱动模组一侧的龙门架的底部安装有第三激光位移传感器;
13、首先在导电玻璃基片未放置在大理石平台上的情况下,通过x轴导轨组件驱动滑台沿着x轴方向移动,直至第三激光位移传感器位于大理石平台的正上方时,测定到大理石平台的距离,随后通过x轴导轨组件驱动滑台向x轴的负方向运行直到原点,此时在大理石平台上放置导电玻璃基片,进行上述同样的运动,由第三激光位移传感器测定到导电玻璃基片的垂直距离,由此就可以测得导电玻璃基片的厚度;
14、步骤4、涂布步骤:
15、通过涂布刀头驱动模组带动涂布刀头对位于大理石平台上的导电玻璃基片进行涂布工作。
16、作为本发明的进一步改进,在步骤1中,涂布刀头沿着y轴方向的两侧均通过涂布刀头限位块安装在支架上。
17、作为本发明的进一步改进,x轴导轨组件包括x轴直线电机,x轴直线电机驱动上方的滑台沿着x轴方向移动。
18、作为本发明的进一步改进,x轴导轨组件上沿着x轴负方向的一侧安装有光电开关以及与上述的光电开关相适配的挡块。
19、作为本发明的进一步改进,在步骤中,检测相机的型号为mv-ce200-11um,分辨率为5472×3648,检测相机的镜头为远心镜头,光源为同轴蓝光,相机标定采用tsai两步法,即先线性求得相机参数,之后考虑畸变因素,得到初始的参数值,通过非线性优化得到最终的相机参数。
20、作为本发明的进一步改进,步骤1具体包括以下步骤:
21、步骤11、飞拍过程:
22、y轴直线电机驱动检测相机在y轴方向上匀速直线运动,触发飞拍;
23、步骤12、将多张图像合成为一整张图像,并用于在上位机显示:
24、输入图像,并进行几何校正;图像预处理;对每幅图像进行特征点的提取,采用halcon算子提取两对特征点进行匹配,进而继续采用halcon算子进行图像的配准,最后进行图像的融合以及对重叠边界的处理后得到拼接的一整张图像;
25、步骤13、进行一整张图像的预处理:
26、首先选取roi区域,为了能够更好地提取图像中感兴趣的像素集合,预先对图像进行处理,即选取需求灰度区域,采用halcon算子进行对图像二值化,随之断开连通域与选择图像的轮廓,最终进行区域转换和缩减图片;
27、步骤14、亚像素提取:
28、亚像素提取使用canny算子,先使用高斯平滑滤波器卷积降噪,再用sobel卷积阵列计算边缘梯度和方向,然后使用非极大值抑制移除非边缘线条,最后使用滞后阈值检测并连接边缘,将获取的边缘点连接起来,就是边缘轮廓,进行亚像素细分,halcon把亚像素的轮廓定义为xld轮廓,后续则筛选xld轮廓;
29、步骤15、进行图形的拟合:
30、根据合成照片拟合上下刀唇作为两条直线作为基准线,分别称为xy曲线;
31、根据拍照区域,将上下刀唇各n张照片分别拟合为一条直线,并将从刀头左边至右边上下唇一一对应,即上刀唇第一条直线为x对应下刀唇第一条直线为y,至上刀唇第一条直线为xn对应下刀唇第一条直线为yn;
32、步骤16、判断:
33、拟合完成后,即根据照片对应的世界坐标生成多段直线,即n根直线,每根直线单独判断角度,当单个曲线例如xi与基准线x角度偏差超过阈值k,当单个曲线例如yi与基准线y角度偏差超过阈值k即判断此处刀唇存在问题,并在合成照片对应位置显示;
34、分别取上下刀唇xi与yi中点处,连接为一条直线zi,当直线zi大于或者小于阈值jmin或者jmax,即判断此处刀唇存在问题,并在合成照片对应位置显示;
35、步骤17、最后将xld亚像素轮廓转换为世界轮廓并进行显示。
36、作为本发明的进一步改进,在步骤中,通过第一激光位移传感器发射激光然后反射测得此处位于标定块下表面的距离,将其记录下来并显示示数,随之将第一激光位移传感器的示数进行清零,记为零位;随之通过第二激光位移传感器发射激光然后反射测得此处位于标定块下表面的距离,并将其记录下来并显示示数,计算出两端的高度差δn1,并将其设定为一个标准值并定性为标准水平工作平台。
37、作为本发明的进一步改进,在步骤中,计算出前后两个运动过程的高度差δn2,此高度差δn2就是导电玻璃基片的厚度。
38、借由上述方案,本发明至少具有以下优点:
39、本发明可同步实现涂布刀头唇缝宽度检测、水平工作台面标定、导电玻璃基片厚度测定以及涂布处理,综合处理性能较强;
40、本发明可用以解决人为操作下导致的涂布刀头唇缝宽度偏差过大以及导电玻璃基片厚度测定不准确导致发生撞刀的技术问题,减少操作难度以及“撞刀”风险,并精准测量涂布刀头唇缝宽度以及导电玻璃基片厚度用以满足钙钛矿太阳能电池工艺地要求;
41、本发明通过相机飞拍与伺服滑台联动操作,实现自动精准地标定并检测唇缝宽度以确保满足工艺要求;
42、本发明采用固定式激光位移传感器进行非接触式、快速且高精度的距离测量,其精度可达微米级,从而提高数据采集过程中的精确性以保证精准度。
43、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
本文地址:https://www.jishuxx.com/zhuanli/20240801/245565.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表