一种永磁同步电机电流环无差拍控制方法、装置及介质与流程
- 国知局
- 2024-08-02 16:05:59
本申请涉及伺服控制,特别涉及一种永磁同步电机电流环无差拍控制方法、装置及介质。
背景技术:
1、现有技术中,使用无差拍预测控制算法,设计电流控制器,预测控制可以实现对参考信号的无超调快速跟踪,是一种比较有应用前景的电流控制方法。该方法具体通过对d、q轴电流误差进行分段式校正,根据校正后的d、q轴电流参考值以及d、q轴实际电流预测用于生成逆变器驱动信号的电压,能有效抑制模型参数不准确、时变非线性引起的电流调节稳态误差。
2、但是,该类方法未充分考虑弱磁大电流工况下参数摄动的问题。由于单纯的无差拍预测控制算法对需要较为精确的电机参数,因此该类控制器在弱磁工况下的控制效果较差。
技术实现思路
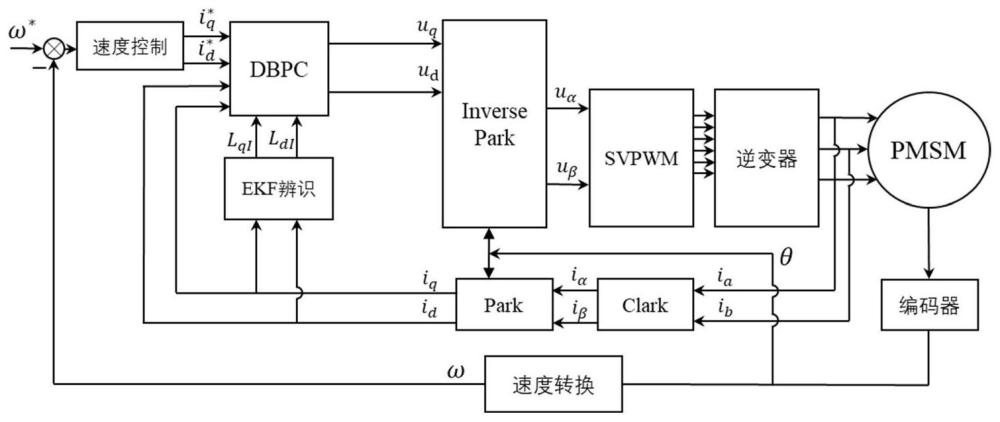
1、本申请提供了一种永磁同步电机电流环无差拍控制方法、装置及介质,其优点是提高伺服控制系统的稳态控制性能以及鲁棒性。
2、第一方面,本申请提供一种永磁同步电机电流环无差拍控制方法,包括以下步骤:
3、建立永磁同步电机dq轴坐标系数学模型;
4、基于永磁同步电机dq轴坐标系数学模型建立双电感在线参数辨识模型和干扰观测器;
5、通过立双电感在线参数辨识模型进行实时参数辨识,获得电感ld和lq;
6、根据获得的ld和lq对干扰进行估计;
7、在电流控制器加入干扰补偿和时延补偿。
8、进一步的,永磁同步电机dq轴坐标系数学模型为:
9、
10、其中,ld为直轴电感;lq为交轴电感;r为定子电阻;ψf为永磁体磁链;id为直轴电流值;iq为交轴电流值;ud为直轴电压值;uq为交轴电压值;ωe为电角速度;电感ld和lq为需要在线辨识的参数。
11、进一步的,双电感在线参数辨识模型为:将模型(1)改写为考虑模型噪声与采样噪声的公式(2)形式:
12、
13、其中x=(id,iq,lq,ld)t,u=(ud,uq)t,y=(id,iq)t;σ为状态噪声;μ为测量噪声。
14、算法基于扩展卡尔曼滤波,算法迭代流程如(3)所示:
15、
16、其中矩阵fk-1和hk如公式(4-5)所示:
17、
18、
19、其中tc为迭代周期,为状态噪声协方差矩阵,为测量噪声协方差矩阵,初始值可设置为零矩阵。
20、进一步的,经在线辨识得到电感ldi和lqi之后,可对公式(1)进行解耦,得到简化后的数学模型:
21、
22、其中,d1=-rid/ld+σd,d2=-riq/lq+σq分别表示d轴和q轴的集总干扰,σd和σq分别表示d轴和q轴包含辨识误差在内的其他干扰,ldi和lqi为对应参数的辨识值;
23、令采样周期为ts,基于前向欧拉法,可以对公式(6)进行离散化,并将其写为状态空间方程的形式:
24、
25、其中,d(k)=[tsd1(k) tsd2(k)]t
26、基于公式(7),设计干扰观测器为:
27、
28、通过干扰观测器(8)的输出,对k+1时刻的控制量进行求解:
29、
30、在k时刻求解出和即可实现对单步时延的补偿。
31、第二方面,一种永磁同步电机电流环无差拍控制装置,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序被处理器调用并执行时,实现如上所述的永磁同步电机电流环无差拍控制方法。
32、第三方面,一种计算机可读介质,所述计算机可读介质存储有计算机程序,所述计算机程序被计算机调用并执行时,实现如上所述的永磁同步电机电流环无差拍控制方法。
33、综上所述,本申请的有益效果有:
34、1、本方法通过干扰观测器所估计的在k+1时刻的电流以及干扰,可以提前计算出在k+1时刻的控制量,因此可以对单步时延进行补偿,特别是提高了伺服控制系统的稳态控制性能以及鲁棒性。
35、2、本方法结合了电感在线辨识算法,采用扩展卡尔曼滤波方法对双电感和进行辨识,弥补了参数摄动特别是大电流工况下ld和lq的摄动对预测控制效果的影响,进一步提升了控制系统的性能。与最小二乘法相比,此辨识方法的优点在于能合理利用扩展卡尔曼滤波的优势,引入状态噪声协方差矩阵和测量噪声协方差矩阵两个参数可调矩阵,通过预设两个矩阵参数,以减小采样噪声对辨识结果的影响,从而获得比传统参数辨识方法例如最小二乘法更精确的辨识结果。
技术特征:1.一种永磁同步电机电流环无差拍控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的永磁同步电机电流环无差拍控制方法,其特征在于,永磁同步电机dq轴坐标系数学模型为:
3.根据权利要求1所述的永磁同步电机电流环无差拍控制方法,其特征在于,双电感在线参数辨识模型为:将模型(1)改写为考虑模型噪声与采样噪声的公式(2)形式:
4.根据权利要求1所述的永磁同步电机电流环无差拍控制方法,其特征在于,经在线辨识得到电感ldi和lqi之后,可对公式(1)进行解耦,得到简化后的数学模型:
5.一种永磁同步电机电流环无差拍控制装置,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序被处理器调用并执行时,实现如权利要求1-4任意一项所述的永磁同步电机电流环无差拍控制方法。
6.一种计算机可读介质,其特征在于,所述计算机可读介质存储有计算机程序,所述计算机程序被计算机调用并执行时,实现如权利要求1-4任意一项所述的永磁同步电机电流环无差拍控制方法。
技术总结本申请公开了一种永磁同步电机电流环无差拍控制方法,包括以下步骤:建立永磁同步电机dq轴坐标系数学模型;基于永磁同步电机dq轴坐标系数学模型建立双电感在线参数辨识模型和干扰观测器;通过立双电感在线参数辨识模型进行实时参数辨识,获得电感L<subgt;d</subgt;和L<subgt;q</subgt;;根据获得的L<subgt;d</subgt;和L<subgt;q</subgt;对干扰进行估计;在电流控制器加入干扰补偿和时延补偿。本申请优点是提高伺服控制系统的稳态控制性能以及鲁棒性。技术研发人员:李世华,杨凯峰,李海峰,成泽宇,齐丹丹,李军良,王佐受保护的技术使用者:南京埃斯顿自动化股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/249321.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表