一种基于在线最大转矩电流比的转差型矢量控制方法与流程
- 国知局
- 2024-08-02 16:08:43
本发明涉及无刷双馈电机控制,更具体的说是涉及一种基于在线最大转矩电流比的转差型矢量控制方法。
背景技术:
1、无刷双馈电机(brushless doubly fed machine,bdfm)是一种新型的交流调速电机,由于取消了电刷和滑环,所以降低了维护成本,提高了系统可靠性;同时它兼顾异步电机和同步电机的特性,特别是与单个电机相比,当在同步转速附近运行时,具有变频装置容量小,功率因数可调,系统成本低等优点。近年来无刷双馈电机成为电力电子与电力传动方向的研究热点之一。
2、近些年,针对单个电机的在线最大转矩电流比(maximum torque per ampere,mtpa)控制已经开展了较为广泛的研究,然而与单个电机相比,无刷双馈电机建模较复杂,控制器设计难度大,仅有hamidreza mosaddegh et.al对bdfm开展了相关研究,为了简化系统模型,降低了系统控制难度,他们忽略转子损耗,将无刷双馈电机的等效电路近似等效为有刷双馈电机,以此为基础,在功率电机定子磁场定向控制和输入输出反馈线性化控制上研究了无刷双馈电机的mtpa控制,通过查表法输出最小化定子电流所对应的相角。然而,mtpa查表法只能根据预先定义的转矩查找所对应控制电流的相角,不仅存在一定的约束性而且计算精度不高、占用一定的存储空间。同时,传统的无刷双馈电机转差型矢量控制在空载和轻载情况下具有定子电流大的问题。
3、因此,如何提高电机的运行效率,并且确保无刷双馈电机的转差型矢量控制在空载和轻载情况下控制电机定子电流小,是本领域技术人员亟需解决的问题。
技术实现思路
1、鉴于上述问题,本发明提供一种基于在线最大转矩电流比的转差型矢量控制方法,以至少解决上述背景技术中提到的部分技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明提供了一种基于在线最大转矩电流比的转差型矢量控制方法,包括如下步骤:
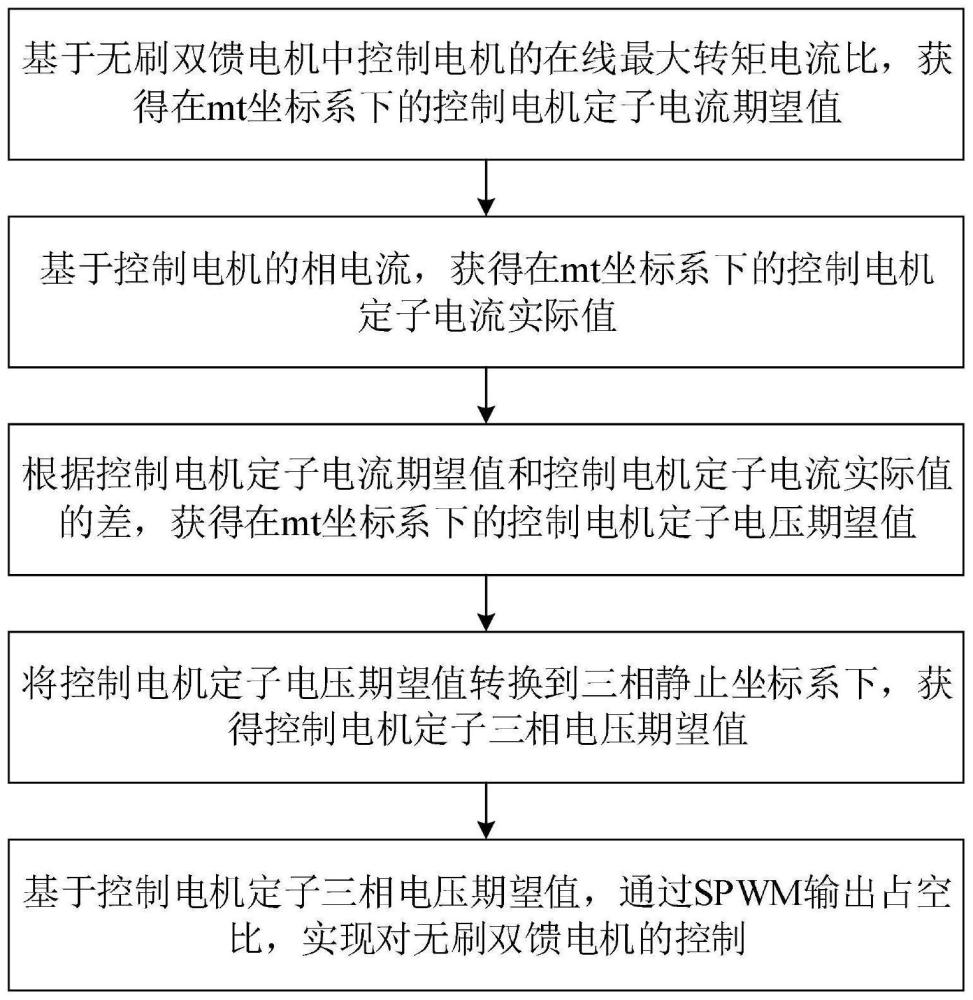
4、基于无刷双馈电机中控制电机的在线最大转矩电流比,获得在mt坐标系下的控制电机定子电流期望值;
5、基于控制电机的相电流,获得在mt坐标系下的控制电机定子电流实际值;
6、根据所述控制电机定子电流期望值和所述控制电机定子电流实际值的差,获得在mt坐标系下的控制电机定子电压期望值;
7、将所述控制电机定子电压期望值转换到三相静止坐标系下,获得控制电机定子三相电压期望值;
8、基于所述控制电机定子三相电压期望值,通过spwm输出占空比,实现对所述无刷双馈电机的控制。
9、进一步地,所述基于无刷双馈电机中控制电机的在线最大转矩电流比,获得在mt坐标系下的控制电机定子电流期望值,具体包括:
10、构建无刷双馈电机的转差型矢量控制模型;
11、构建基于在线最大转矩电流比的预设控制电机转子励磁磁链模型;
12、基于所述预设控制电机转子励磁磁链模型,获得基于在线最大转矩电流比的预设控制电机转子励磁磁链期望值;
13、将所述预设控制电机转子励磁磁链期望值代入至所述转差型矢量控制模型中,获得在mt坐标系下的控制电机定子电流期望值。
14、进一步地,所述构建无刷双馈电机的转差型矢量控制模型,具体包括:
15、将功率电机定子电压和控制电机定子电流作为输入,将功率电机定子磁链和预设控制电机转子励磁磁链作为状态变量,构建无刷双馈电机在mt坐标系下的状态空间模型和电磁转矩模型;
16、根据所述状态空间模型和所述电磁转矩模型,对预设控制电机进行转子磁场定向;
17、获取转子磁场定向后的预设控制电机转子励磁磁链期望值,以及获取转子磁场定向后的新状态空间模型和新电磁转矩模型;
18、将所述预设控制电机转子励磁磁链期望值,结合电磁转矩期望值,代入至所述新状态空间模型和所述新电磁转矩模型中,获得无刷双馈电机的转差型矢量控制模型。
19、进一步地,所述转差型矢量控制模型表示为:
20、
21、
22、
23、其中,表示在m轴上的控制电机定子电流期望值;表示在t轴上的控制电机定子电流期望值;表示转差速度期望值;lps表示功率电机定子电感;lpm表示功率电机定子互感;lcm表示控制电机定子互感;lc′r表示预设控制电机转子电感;表示预设控制电机转子励磁磁链期望值;表示对时间求导后的预设控制电机转子励磁磁链期望值;pp表示功率电机极对数;pc表示控制电机极对数;ωr表示机械角速度;表示在t轴上的功率电机定子磁链的负共轭变换;表示在m轴上的功率电机定子磁链的负共轭变换;rps表示功率电机定子电阻;表示在m轴上功率电机定子电压的负共轭变换;表示在t轴上功率电机定子电压的负共轭变换;表示电磁转矩期望值。
24、进一步地,所述构建基于在线最大转矩电流比的预设控制电机转子励磁磁链模型,具体包括:
25、将控制电机定子电流幅值和所述新电磁转矩模型作为约束条件,构建无刷双馈电机在线最大转矩电流比控制的辅助函数;
26、根据所述辅助函数,基于在线最大转矩电流比,获得m轴上与t轴上的控制电机定子电流比;
27、根据所述辅助函数,基于所述状态空间模型,获得m轴上控制电机定子电流表达式,以及t轴上控制电机定子电流表达式;
28、根据所述控制电机定子电流比、m轴上控制电机定子电流表达式和t轴上控制电机定子电流表达式,获得预设控制电机转子励磁磁链模型。
29、进一步地,所述预设控制电机转子励磁磁链模型,表示为:
30、
31、其中,表示基于在线最大转矩电流比的预设控制电机转子励磁磁链期望值;lc′r表示预设控制电机转子电感;lpm表示功率电机定子互感;lps表示功率电机定子电感;表示在t轴上的功率电机定子磁链的负共轭变换;表示在m轴上的功率电机定子磁链的负共轭变换;pp表示功率电机极对数;pc表示控制电机极对数;表示电磁转矩期望值;表示转差速度。
32、进一步地,所述基于所述预设控制电机转子励磁磁链模型,获得基于在线最大转矩电流比的预设控制电机转子励磁磁链期望值,具体包括:
33、采用比例-积分控制器获取控制电机的电磁转矩期望值;
34、获取控制电机的转差速度;
35、获取功率电机的三相电压和三相电流,并分别转换为静止坐标系下功率电机两相电压和功率电机两相电流;
36、根据所述功率电机两相电压和所述功率电机两相电流,获得在mt坐标系下功率电机定子磁链的负共轭变换;
37、将所述电磁转矩期望值、所述转差速度和所述在mt坐标系下功率电机定子磁链的负共轭变换,输入至所述预设控制电机转子励磁磁链模型中,获得基于在线最大转矩电流比的预设控制电机转子励磁磁链期望值。
38、进一步地,所述将所述预设控制电机转子励磁磁链期望值代入至所述转差型矢量控制模型中,获得在mt坐标系下的控制电机定子电流期望值,具体包括:
39、获取功率电机的机械角速度;
40、基于静止坐标系下功率电机两相电压,获得在mt坐标系下功率电机定子电压的负共轭变换;
41、将所述基于在线最大转矩电流比的预设控制电机转子励磁磁链期望值、所述机械角速度、在mt坐标系下功率电机定子磁链的负共轭变换,以及在mt坐标系下功率电机定子电压的负共轭变换,输入至所述转差型矢量控制模型中,获得在mt坐标系下的控制电机定子电流期望值。
42、进一步地,所述基于控制电机的相电流,获得在mt坐标系下的控制电机定子电流实际值,具体包括:
43、获取控制电机的三相电流,并转化为静止坐标系下控制电机两相电流;
44、基于静止坐标系下控制电机两相电流,获得在mt坐标系下的控制电机定子电流实际值。
45、进一步地,采用比例-积分控制器获得在mt坐标系下的控制电机定子电压期望值。
46、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于在线最大转矩电流比的转差型矢量控制方法,具有如下有益效果:
47、本发明基于在线最大转矩电流比(mtpa),解决了无刷双馈电机传统转差型矢量控制在空载和轻载情况下控制电机定子电流大的问题。
48、本发明根据电磁转矩、转差速度代入mtpa判据,在线计算得到控制电流幅值最小时所对应的预设控制电机转子励磁磁链,解决了离线查表法中所存在的计算精度不高、占存储空间大等问题。
49、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240801/249484.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表