用于自动设置角度位置传感器的方法与流程
- 国知局
- 2024-08-02 16:09:46
本发明的是提供有用于测量转子相对于定子的角度位置的角度位置传感器的旋转电机的。本发明涉及该传感器的初始调整,该传感器例如旋转变压器或霍尔效应传感器。
背景技术:
1、电机配备有包括绕组的场定子和包括电枢体和旋转轴的转子,诸如旋转变压器或霍尔效应传感器之类的位置传感器被安装到旋转轴。角度位置传感器包括被安装到电机的转子的轴上的可移动部分和固定部分,电机输出一组电信号,电信号的相对幅度特性瞬时地反映机器的转子的角度位置。
2、在自控电机中,该信号被用来控制场定子线圈中的电流以保持定子中的旋转磁场与转子极之间生成的磁场之间的最佳(通常正交)角度差。
3、当扭矩非常高时,转子轴可能相对于转子本体滑动。角度传感器的初始角度设置相应地被改变。此外,角度传感器的可移动部分也会在转子轴上滑动,导致角度位置的偏移。
4、该偏移导致电机的命令的功能紊乱。实际上,在同步电机(例如三相永磁电机)中,所产生的扭矩取决于转子磁通与定子磁通之间的相互作用。由于转子磁通是由永磁体产生的,因此通过调整定子磁通来调整扭矩,其中两个参数可访问:磁通的幅度,其本身由三相供电系统中的电流的幅度来调整,以及定子磁通相对于转子磁通的相位。该相位本身由定子电流的相位来调整。在给定的电流幅度下,当转子磁通相对于定子磁通或多或少相位正交时,获得最大扭矩。电流的幅度借助于使用来自电流传感器的测量值的控制器来控制。
5、为了能够精确地调整定子电流的相位,因此需要电动机转子位置传感器来知晓转子(并且因此知晓转子磁通)相对于定子线圈的角度位置。这是位置传感器的功能,用于测量其可移动部分的绝对位置,并且如果传感器的可移动部分与转子极之间没有滑动,则测量机器转子的角度位置。机器转子与机器定子之间的给定参考位置对应于用于通过位置传感器测量转子位置的参考值,例如“零度”。对于电机的控制并且按照惯例,当机器的转子极与a相(即定子的相之一)的线圈的相应轴线对齐时,机器的转子在一次电气旋转中的绝对位置的“零度”角度参考出现,其空间位置显然可以从线圈的构造中被获知。
6、在位置传感器的可移动部分与转子的活动部分之间发生滑移的情况下,位置传感器的测量指示与转子位置的参考值之间存在差异。该差异将被称为“位置传感器设置误差”。
7、因此,有必要知道该位置传感器设置误差,以便精确地知晓机器转子磁通的位置并因此能够优化机器控制。
8、一种解决方案是使用静态位置误差搜索方法,该方法包括将恒定电流注入到例如定子线圈的两相中。同步电机应处于空转,即电机的转子应与涡轮发动机推进单元的本体解耦,允许自由旋转的转子呈现明确定义的平衡位置,磁体的转子磁通自然地与定子磁通对齐,从而在转子与定子之间产生已知的预定角度位置。位置传感器测量并传输所测量的角度位置,并且计算单元因此可以将所测量的角度位置与在转子的该平衡位置处的预定角度位置进行比较,并推导出该角度位置测量值与预定角度位置之间的角度位置测量误差。因此,在电机的正常操作模式下,计算单元可以通过将由位置传感器所测量的角度偏移该角度位置误差来计算调整的角度。
9、这种静态位置误差搜索方法具有将高幅度静态电流注入到定子中以允许转子旋转以便获得已知(参考)转子角度位置从而导致在错误搜索过程期间线圈和电力电子开关显著发热的缺点,这可能会损坏电机的若干组件(电子器件、电力电子开关、线圈、转子磁体)。此外,对于具有p个极对的多极机器,每次机械旋转有p个电气旋转,因此已知的角度平衡位置与为两相供电的极对一样多。因此可能需要多次执行该静态位置误差搜索方法,例如通过对其他相供电或再次开始对两相的相同供电,以便检查角度位置误差。因此,需要针对多个位置多次执行静态位置误差搜索方法,导致方法很长。
10、本发明的目的是简单、更快速地校正位置传感器设置误差,并且对各种机器元件(电子开关、线圈等)造成损坏的风险更小。
技术实现思路
1、本发明通过以下方式提供了对先前讨论的问题的解决方案,该方式使得可以在转子旋转时在非常具体的条件下估计转子相对于定子在时间t时的角度位置,并且将该估计的角度位置与由位置传感器测量的角度位置进行比较,以便识别和校正导致位置传感器设置误差的角度偏移。
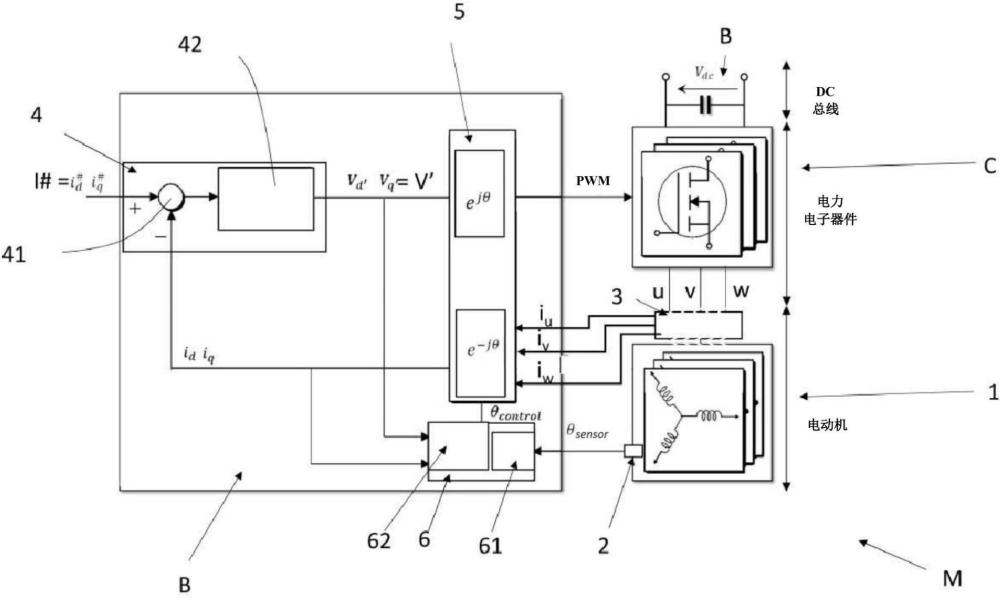
2、本发明的一个方面涉及一种用于自动设置角度位置传感器的方法,该角度位置传感器测量与电枢转子的机械角度位置相对应的角度,其中该电枢转子具有相对于定子形成p极对的磁体,该定子包括航空器的推进单元的电机的多相同步电动机的x相,该位置传感器包括安装到电枢转子的可移动部分和相对于定子的固定部分,该方法使用控制环路来向电机的反相器转换器传输命令以向定子的相供电,该控制环路包括:电流控制器,该电流控制器包括设定点输入,用于接收包括正交电流和直接电流的电流设定点,该正交电流包括设定点电流矢量的正交轴上的分量,该直流电流对应于设定点电流矢量的直接轴上的分量,以及用于递送电压设定点的设定点直接电流,电压设定点包括电压矢量的直接轴上的分量和电压矢量的正交轴上的分量;正派克和逆派克计算单元,用于将电压设定点变换为反相器转换器的命令,该方法的特征在于,它包括基于速度的位置传感器误差识别部分,其部分由角度误差补偿器产生,包括以下步骤:
3、-计算反相器转换器的命令,以便使电枢转子恒定地以预定机械速度旋转,
4、-测量相电流并将其在派克参考系中变换为返回正交电流和返回直接电流,同时考虑计算出的调整角度,
5、-通过将极对的数量p乘以预定机械速度来计算电转子速度,
6、-通过在电流控制器上施加等于0的直接电流值来计算在转子以预定机械速度旋转的时段t内的电压设定点,
7、-通过在时段t期间将电压设定点的直接电压与相反符号的值进行比较来识别其直接轴上的直接分量的偏移误差,该值等于计算出的电速度乘以正交电感乘以返回正交电流,
8、-通过在时段t期间将电压设定点的正交电压与第一值进行比较来识别其正交轴上的正交分量的偏移误差,该第一值等于计算出的转子的电速度乘以与转子磁体的磁通相对应的预定值,
9、-根据识别出的这些直接和正交角度偏移误差来计算角度差值,
10、-在时段t时根据计算出的角度差值和测量到的角度值来确定所调整的角度,
11、-根据调整角度将返回正交电流和返回直接电流传输到电流控制器。
12、凭借本发明,该方法提供了命令法则,其识别电机的转子的实际角度位置与在设定点直接电流等于零的条件下的电机的电流控制环路中使用的角度位置之间是否存在误差。
13、实际上,当直接电流等于零时,并且如果位置传感器在相对于转子定位其零角度时没有误差,则在控制器的输出处的直接电压vd′包括等于-ωeleclqiq的值并且vq′包括等于的值。因此,通过将电流矢量在直接电流轴上的分量(记为id)施加为等于零,如果传感器与转子之间存在位置测量偏移,则角度位置对电动机扭矩没有影响,电动机扭矩为因此由电流矢量在正交轴上的分量(记为iq)控制。因此,在出现测量误差的情况下,在控制器上施加等于0的直接电流使得可以识别定位误差并调整定位,以将电压矢量的直接轴上的分量向其等于-ωeleclqiq的实际值收敛并将电压矢量的正交轴上的分量vq′向其实际值收敛。
14、此外,这种方法在电机的两个旋转方向上操作,无论是正方向(逆时针方向)还是负方向(顺时针方向)。
15、除了在前一段落中刚刚讨论的特征之外,根据本发明的一个方面的方法可以具有单独考虑或根据任何技术上可能的组合考虑的以下特征中的一个或多个附加特性:
16、根据一个实施例,位置传感器是旋转变压器。
17、根据另一个实施例,位置传感器是霍尔效应传感器。
18、根据一个实施例,根据以下公式计算角度差值(δθ):
19、
20、-其中εd=ωeleclqiq+vd′对应于用于识别直接分量的角度误差的比较,并且对应于用于识别正交分量的角度误差的比较,lq是正交电感,kp,ki是比例积分型校正器的增益,其被用来分别消除设定点正交电流与返回正交电流以及设定点直接电流与返回直接电流之间的误差。
21、根据一个实施例,转子耦合到包括惯性矩的推进单元的轴,其中在时段t期间,直接电压的值被施加等于0。
22、根据一个实施例,转子耦合到涡轮发动机的本体,并且基于速度的位置传感器校准部分以不同的预定速度再次被启动x次,并且每次执行基于速度的位置传感器校准部分时,记录所调整的角度与所测量的角度之间的角度差的值以及对应的预定速度。
23、-根据该实施例的一个示例,第一预定机械速度是预定速度中的最高速度,例如转子的最大旋转速度,并且该方法通过将转子的机械速度减小预定差来再次启动基于速度的位置传感器校准部分,直到转子停止旋转。
24、根据不同于前一个实施例的另一个实施例,电机可以空转,例如通过与涡轮发动机轴脱离,该方法包括:
25、-在计算基于速度的位置传感器误差识别部分的反相器转换器的命令的步骤中,每次该方法再次启动基于速度的位置传感器误差识别部分时,以预定的方式递增预定机械旋转速度,
26、-在基于速度的位置传感器误差识别部分中,记录计算出的调整角度值与所测量的角度之间的每个角度差值的步骤。
27、根据本实施例的一个示例,该方法在基于速度的位置传感器校准部分之后还包括基于电流的角度位置传感器设置检查部分,包括以下步骤:
28、-计算反相器转换器的命令,以向x相供电,以便使电枢转子恒定地以第二预定机械速度旋转,
29、-测量各相的电流并在派克参考系中将其变换为返回正交电流和返回直接电流,同时考虑调整角度的计算出的值,
30、-通过将极对的数量乘以第二预定机械速度来计算转子的电速度,
31、-在电流控制器的输入处对预定机械速度施加设定点正交电流至不为零的第一预定值,并且施加直接设定点电流至零值,
32、-确定正交电感,
33、-在恒定的第二预定速度处比较在电流控制器的输出处直接设定点电压的值等于相反符号的值,该值等于计算出的电速度、正交电感和返回正交电流的乘积,
34、-在恒定的第二预定机械速度处比较在电流控制器的输出处正交设定点电压的值等于计算出的电速度乘以对应于转子磁体的磁通的预定值的乘积,
35、-根据这些比较在转子恒定地以第二预定机械速度旋转时,计算所计算出的调整角度与所测量的角度之间的角度差,并记录它,
36、-其中自动设置方法将基于电流的角度位置传感器设置验证部分重复预定次数,每次以预定的方式递增预定设定点正交电流值,直到获得预定的最大返回正交电流值。
37、根据一个实施例,通过根据位置传感器的位置测量值和电流测量值来计算速度来计算命令,
38、根据一个实施例,该方法包括根据所测量的电流的直接分量和正交分量id和iq的值以及根据机器的预定映射来确定正交电感的步骤。
39、本发明的另一方面涉及一种用于命令涡轮发动机的电机的方法,其中每次启动电机时,该方法包括在有或没有上述实施例的特征的情况下的上述用于自动设置角度位置传感器的方法,并且其中该方法还包括命令电动机的正常模式,包括以下步骤:根据返回正交电流和返回直接电流的值的接收到的设定点,计算反相器转换器的命令以用于为电动机的定子的相供电,计算单元根据角度b、通过正或逆派克变换的数学方法来执行计算,该角度b包括测量角度加上根据所记录的角度差的校正值。
40、根据一个实施例,校正值可以等于所记录的计算出的角度差值,该角度差值对应于最接近于所测量的瞬时机械速度的所记录的预定机械速度。
41、根据另一个实施例,该方法还包括计算所记录的角度差值的均值的步骤,并且其中校正值等于所记录的角度差值的均值。
42、本发明的另一方面涉及一种涡轮发动机的电机的控制环路,用于计算用于电动机的反相器转换器的命令,该电动机包括具有形成x相的定子线圈的场定子、具有p个极对的磁体和耦合到涡轮发动机本体的轴的电枢转子,反相器转换器,其包括命令输入和输出,每个都连接到x相之一以用于命令电动机,测量在x相上传递的电流的装置,以及位置传感器,该位置传感器包括与转子轴一体安装的可旋转可移动部分和与定子一体的固定部分,该控制环路被配置为在有或没有上述两个实施例之一的不同特征的情况下执行根据本发明的前述方面的用于命令包括电机的涡轮发动机的方法,以计算反相器转换器的命令,该控制环路包括:
43、-电流控制器,包括:
44、o直接和正交电流设定点输入,
45、o直接和正交电流返回输入,
46、o电压设定点输出,
47、-用于执行逆派克变换的计算单元,包括:
48、o直接和正交电压设定点输入,其连接到电流控制器的电压设定点输出,
49、o测量电流输入,其连接到测量装置,
50、o调整角度位置输入,
51、o电流返回输出,用于输出返回正交电流和返回直接电流,该电流返回输出连接到电流控制器的返回输入,
52、o命令输出,其将被连接到反相器转换器的命令输入,
53、-角度误差补偿器,包括:
54、o测量输入,其将被连接到角度测量传感器,
55、o电流返回输入,其连接到计算单元的电流返回输出,用于接收返回正交电流和返回直接电流,
56、o电压设定点输入,其连接到控制器的电压设定点输出以接收直接和正交设定点电压,
57、o调整角度输出,其连接到计算单元的调整角度位置输入,
58、o调整角度计算器,其被配置为:
59、·根据电流测量值和电压设定点以及转子速度来计算角度差值,一方面识别直接轴上的角度误差,另一方面识别正交轴上的角度误差,
60、·根据比较根据角度差值来计算调整角度。
61、电流控制器因此被配置为根据在其返回输入处接收到的返回正交电流和正交返回直接电流,将包括在其设定点输入处接收到的设定点正交电流和设定点直接电流的设定点变换成其设定点输出处的电压设定点,该电压设定点包括具有角度的正交电压和直接电压。
62、能够执行派克变换及逆派克变换的计算单元被配置为:
63、-根据调整角度的值,将在测量电流输入处接收到的测量电流变换为派克参考系中的正交电流和直接电流,并在其返回输出处输出该正交电流和该直接电流,
64、-对在电压设定点输入处接收到的正交电压和直接电压进行逆派克变换,以在控制输出处将脉冲宽度调制命令传输到反相器转换器,以便向主定子的定子线圈供电。
65、角度误差补偿器可以被配置为在时段t期间将电压设定点的直接电压与相反符号的值进行比较,该值等于计算出的电速度乘以正交电感乘以正交返回电流,并且将电压设定点的正交电压与第一值进行比较,该第一值等于计算出的转子的电速度乘以与转子磁体的磁通相对应的预定值。
66、本发明的另一方面涉及一种电机,包括转子、定子、位置传感器和反相器转换器,该反相器转换器包括命令输入和输出,每个都连接到x相之一以用于命令电动机和控制环路。
67、通过阅读以下描述并通过查看附图,将更好地理解本发明及其不同的应用。
本文地址:https://www.jishuxx.com/zhuanli/20240801/249529.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表