多元新能源接入的多区域微网鲁棒低带宽调频控制方法
- 国知局
- 2024-08-02 16:14:38
本发明涉及电力,尤其涉及一种多元新能源接入的多区域微网鲁棒低带宽调频控制方法。
背景技术:
1、随着多元新能源需求的不断增长和可再生能源的广泛应用,多区域微网系统作为一种灵活的电力分布方案逐渐受到关注。
2、其中,多区域微网调频控制在多元新业态能源主体接入的多区域微网系统中扮演着重要角色。在多区域微网调频控制方面,已经出现了众多的研究成果。当前,比如最常用的pi控制、pid控制、h∞鲁棒控制器、自适应鲁棒频率控制方法、基于lyapunov函数的控制策略、无模型算法频率协调控制、分散调频策略等来实现对多区域微网频率的控制。
3、随着能源主体的多样化和规模的扩大,微网的控制复杂度显著增加,传统控制方法难以满足多样化的控制需求。多元新业态能源的大规模接入,降低了现有电力系统的转动惯量。负荷扰动将引发系统较大的频率波动甚至失稳。微网系统受到外部环境、能源供给的波动等因素的影响,传统控制方法的鲁棒性不足,容易受到外界干扰影响系统稳定性。现有的微网调频控制方法通常需要大量的通信带宽来传输控制信息,这在某些情况下可能导致通信网络负载过重或成本增加。
技术实现思路
1、本发明要解决的技术问题是针对上述现有技术的不足,提供一种多元新能源接入的多区域微网鲁棒低带宽调频控制方法,解决多元新能源引入导致的转动惯量降低、鲁棒性不足、通信成本较高等问题。
2、为解决上述技术问题,本发明所采取的技术方案是:
3、一种多元新能源接入的多区域微网鲁棒低带宽调频控制方法,包括以下步骤:
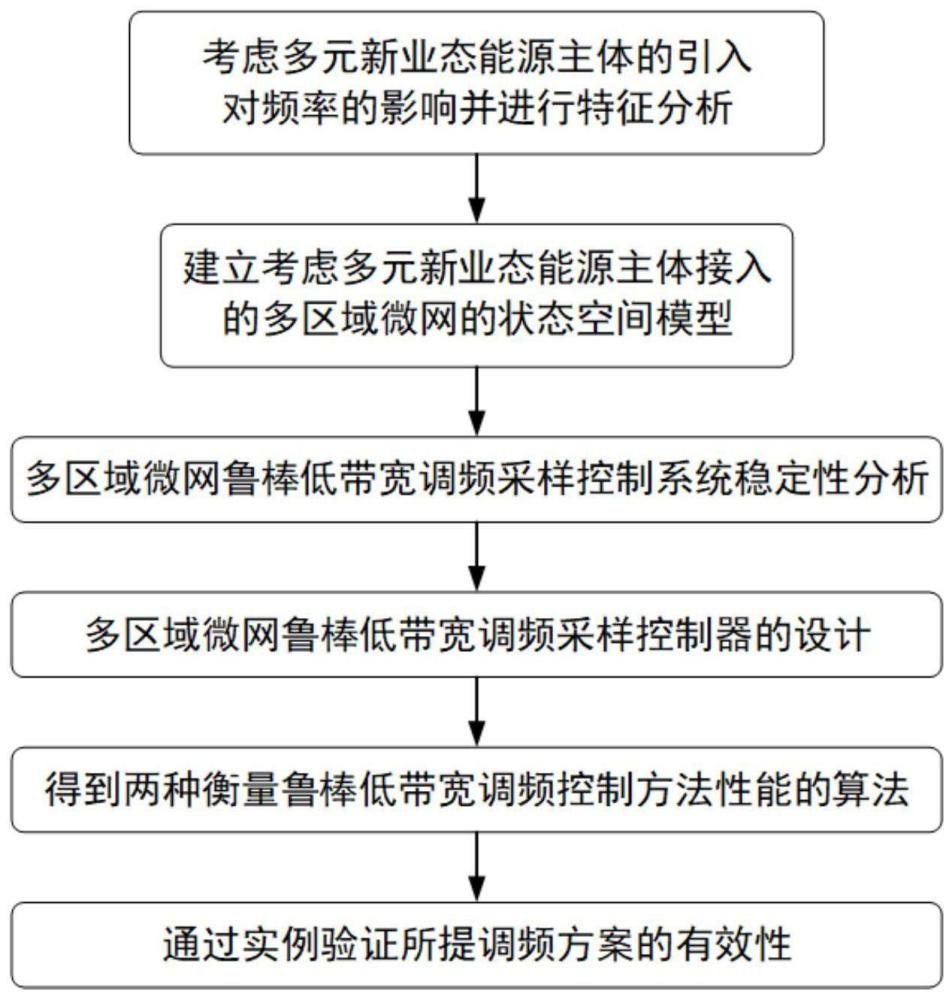
4、步骤1:考虑多元新能源引入对频率的影响并进行特征分析;多元新能源主体包括电动汽车、双馈风电、储能单元、光伏发电、微网;
5、步骤2:采样控制方法的引入,建立考虑多元新能源接入的多区域微网的状态空间模型;
6、步骤3:基于状态空间模型,进行多区域微网系统的稳定性分析,并设计多区域微网鲁棒h∞低带宽采样调频控制器;设计系统具备h∞控制性能,并且系统是渐近稳定的两个条件;给出多区域微网系统存在外部扰动时,系统是渐进稳定的lmi条件;并根据稳定判据得到多区域微网鲁棒h∞低带宽采样调频控制器设计准则;
7、步骤4:得到两种衡量鲁棒低带宽调频控制方法性能的算法,包括:给定h∞性能指标γ和控制器参数ki,得到搜索保持系统稳定的最大采样周期hm的算法;给定h∞性能指标γ,得到搜索保持系统稳定的最大采样周期hm和求解控制器的参数的算法;
8、步骤5:通过步骤4的搜索保持系统稳定的最大采样周期hm和求解控制器的参数的算法,得到多区域微网三区域的采样周期稳定裕度,并求解相应的采样控制器参数;再将求得的采样周期稳定裕度和控制器参数,代入搜索保持系统稳定的最大采样周期hm的算法,使用该算法,得到在给定采样周期条件下,多区域微网稳定的h∞性能指标γmin。
9、进一步地,所述步骤1的具体过程如下:对电动汽车模块引入的考虑,建立ev分布率、单体ev的与电池荷电状态有关的增益,求得集群ev比例增益系数;ev分布率是指在某一微网中,不同个体ev在空间中的分布系数,即:
10、
11、其中,hi,j为第i条主干线的第j条支路上的ev负荷的容量;li为微网主干线数目;lj为微网支路数目;
12、建立双馈风电模块线性传递函数模型为:其中δpwi、δpwpi分别表示随机的风能功率偏差和经机组转化后的风电功率扰动量;s为复频率,twtgi为风电机组的时间常数;
13、构建储能单元的通用模型,描述储能系统的特性;储能参与调频的模型表示为:
14、ace=βδf+δptie;
15、其中,ace为微网的区域控制偏差;表示频率偏差系数;d表示发电机的负荷阻尼系数;r表示调速器速度下降系数;增益k储表示区域控制偏差信号ace与储能电池功率输出变化量δp储之间的关系,t储是储能单元时间常数;δf为频率偏差,δptie为联络线交换功率偏差;
16、光伏发电单元通过光伏有功功率动态特性实现,设计为与微网的频率偏差有关,δppv=2hpvδf,其中hpv为微网光伏发电控制系数;δppv为光伏扰动功率;
17、多区域微网系统相互间根据联络线功率偏差δptie-i交换信号,其中δptie-i=2πtij(∫δfidt-∫δfjdt),tij是微网i和j的联络线同步系数,δfi为微网i的频率偏差,δfj为微网j的频率偏差。
18、进一步地,所述步骤2具体如下:
19、基于采样控制的调频方案只能使用采样后的状态,即只使用在采样时刻的测量;在采样控制模式下,只利用采样时刻tk的测量信号xi(tk)生成控制信号:
20、ui(t)=ui(tk)=kiyi(tk)=kicixi(tk);
21、其中,ki为采样pi控制器的增益参数,ki=[kp,ki],kp为比例增益,ki为积分增益;ci为输出矩阵,表示输出变量与状态变量的关系;
22、建立发电机-负荷模型、调速器模型、原动机模型、联络线模型、电动汽车ev模型和双馈风电模型,具体如下:
23、发电机-负荷线性传递函数模型为:其中δpm是发电机输出机械功率的变化量,δpd是负荷功率的变化量,δf是频率偏差,m是发电机的转动惯量,d是负荷阻尼系数;
24、调速器线性传递函数模型为:其中tg是调速器惯性时间常数,r是调速器速度下降系数,δpc为控制信号;
25、原动机线性传递函数模型为:其中tt是原动机的时间常数;
26、联络线线性传递函数模型为:其中δf1和δf2分别是区域1和区域2的频率偏差,t12是微网i和j的联络线同步系数;
27、电动汽车ev线性传递函数模型为:其中tevi和kev分别表示电动汽车ev的时间常数和增益;
28、建立考虑多元新业态能源主体接入的多区域微网的状态空间模型,微网的状态空间方程描述为:
29、
30、式中,xi(t)表示微网i的状态变量;yi(t)表示输出变量;ui(t)表示控制变量;zi(t)表示控制性能的评价指标;ωi(t)表示外部扰动变量;ai表示系统矩阵,由微网系统参数决定;bi表示系统矩阵,微网由系统参数决定;ci表示输出矩阵,表示输出变量与状态变量的关系;di是控制性能的评价指标zi(t)=col{ε1iacei(t),ε2i∫acei(t)}决定的,其中ε1i和ε2i是权重因子;fi为外部扰动系数矩阵。
31、进一步地,所述步骤3中,系统具备h∞控制性能,并且系统是渐近稳定的两个条件如下:
32、条件一:系统没有外部扰动时,即ωi(t)=0,系统趋于渐进稳定;h∞性能指标为γ>0,标量γ是干扰抑制系数,代表系统对扰动的抑制水平,它是对系统抗扰性能的一种定量刻画;
33、条件二:系统在零初始条件下,存在有限制的外部扰动,即ωi(t)∈[0,+∞),对给定的h∞性能指标γ和控制输出zi(t),满足下式:
34、
35、所述给出多区域微网系统存在外部扰动时,系统是渐进稳定的lmi条件具体如下:
36、基于状态空间模型,得到多区域微网的系统矩阵ai、系统矩阵bi、输出矩阵ci、控制性能的评价指标矩阵di,随后进行多区域微网系统的稳定性分析,并设计多区域微网鲁棒h∞低带宽采样调频控制器;稳定性分析如下:
37、当微网系统存在外部扰动时,即ωi(t)≠0,给定采样周期hm、h∞性能指标γ和控制器增益ki;若存在合适维度对称矩阵p>0,m1>0,m2>0,q,以及任意合适维度矩阵,对任意hk∈[0,hm]时,满足下面两个lmi条件,则系统是渐进稳定的:
38、
39、
40、其中:
41、
42、
43、
44、m11=diag{m1,3m1},m22=diag{m2,3m2};
45、
46、
47、η1=col{e2,e5},η2=col{e4,e1},η3=col{e5-e1,e6},
48、η4=col{e1-e2,e3},η5=col{-e4,-e1},η6=col{-e1+e2,-e3,e5-e1,e6},
49、η7=col{e4,e1,0,0}=col{e4,e1,0×η5},η8=col{0,0,-e4,-e1}=col{0×η2,-e4,-e1},
50、η9=col{e1,e2,e5,e3,e6},η10=col{e1-e2,e3,0,0}=col{e1-e2,e3,0×η3},
51、η11=col{0,0,e5-e1,e6}=col{0×η4,e5-e1,e6},
52、η12=col{e4,0,0,e1,-e1}=col{e4,0×η1,e1,-e1},η13=col{e2,e1,e3},
53、η14=col{e1,e5,e6},η15=col{e1,e4,e2};
54、n为xi(t)中变量的个数;i表示单位矩阵;
55、控制器设计准则如下:通过定义变量矩阵ω和引入新的矩阵y解耦,给出多区域微网鲁棒h∞低带宽采样调频控制器设计准则:
56、
57、
58、其中:
59、
60、
61、
62、
63、
64、
65、ρ=[i7×7,λ1i7×7,λ2i7×7]t,n=kici(y-1)t,η1到η15的定义与稳定性分析中的相同;
66、并且控制器参数得:其中n表示一个自由矩阵。
67、进一步地,所述步骤4中,搜索保持系统稳定的最大采样周期hm的算法具体如下:
68、步骤4-1-1:代入系统的初始化参数,给定性能指标γ和控制器参数ki,设置合适的采样周期搜索区间[hmin,hmax]和精度hjd;
69、步骤4-1-2:用二分法搜索,设htest=(hmin+hmax)/2,然后将htest代入步骤3的稳定性分析中的线性矩阵不等式中,用lmi工具包进行求解;
70、步骤4-1-3:若代入线性矩阵不等式中有解,则令hmin=htest;若无解,则令hmax=htest;
71、步骤4-1-4:若|hmax-hmin|≤hjd,则系统允许的最大采样周期为hm=hmin,搜索结束;否则,跳转至步骤4-1-2。
72、进一步地,所述步骤4中,搜索保持系统稳定的最大采样周期hm和求解控制器的参数的算法具体如下:
73、步骤4-2-1:代入系统的初始化参数,给定性能指标γ,设置调整参数λ1、λ2,设置合适的采样周期搜索区间[hmin,hmax]和精度hjd;
74、步骤4-2-2:用二分法搜索,设htest=(hmin+hmax)/2,然后将htest代入步骤3的控制器设计准则中的线性矩阵不等式中,用lmi工具包进行求解;
75、步骤4-2-3:若代入线性矩阵不等式中有解,则令hmin=htest;若无解,则令hmax=htest;
76、步骤4-2-4:若|hmax-hmin|≤hjd,则系统允许的最大采样周期为hm=hmin,搜索结束,并且通过公式求得控制器参数ki;否则,跳转至步骤4-2-2。
77、采用上述技术方案所产生的有益效果在于:本发明提供的多元新能源接入的多区域微网鲁棒低带宽调频控制方法,采用调频采样控制,减少了控制信息传输所需的通信带宽,降低了通信成本。多元新业态能源主体接入的多区域微网鲁棒低带宽调频采样控制模型结合采样特性和采样数据网络的输出反馈特点,提高了系统的实用性和经济性。稳定准则与控制器设计方法具有鲁棒低带宽的特性,比传统方法更有优越性。
本文地址:https://www.jishuxx.com/zhuanli/20240801/249969.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。