一种室内手榴弹投掷模拟系统及方法与流程
- 国知局
- 2024-08-02 12:18:45
本发明属于军事训练评估,具体为一种室内手榴弹投掷模拟系统及方法。
背景技术:
1、手榴弹投掷是现代军事训练的重要组成部分,传统采用真实手榴弹在户外训练场开展手榴弹投掷训练的方式,能够有效提高参训人员的投掷技能,但投掷过程中无法确保绝对的安全性。虽然通过仿真手榴弹可以解决安全性问题,但该方法无法针对特殊的地形和建筑环境开展训练。
2、通过建设包含多种场景的训练场地,可以提高手榴弹投掷训练的真实性,使参训人员能感受到实战的战场环境,但训练场地占地面积大,且需要根据实际需求不断进行更新,因而需要巨大的资金投入。另一方面,采用虚拟场景仿真的方式,能够以较低的成本,在室内构建逼真的虚拟战场环境,使参训人员在室内即可以感受到实战的场景,因此受到各国研究人员青睐。但如何在室内构建仿真环境,引导参训人员投掷并准确获取落点,又成为新的难点。
3、(1)双目立体识别技术
4、双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中,双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。但是,双目视觉技术的三维识别结果精确度受目标距离影响较大,当目标过远或过近时,识别精度都会显著下降。
5、(2)工业高速相机拍摄技术
6、工业高速相机具有采集帧率高、运行稳定、体积小巧、接口丰富等特点,在机器视觉、医疗健康、工业生产、体育运动等方面具有广泛的应用。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种室内手榴弹投掷模拟系统及方法,有利于提高手榴弹投掷训练的真实性、安全性和准确性。
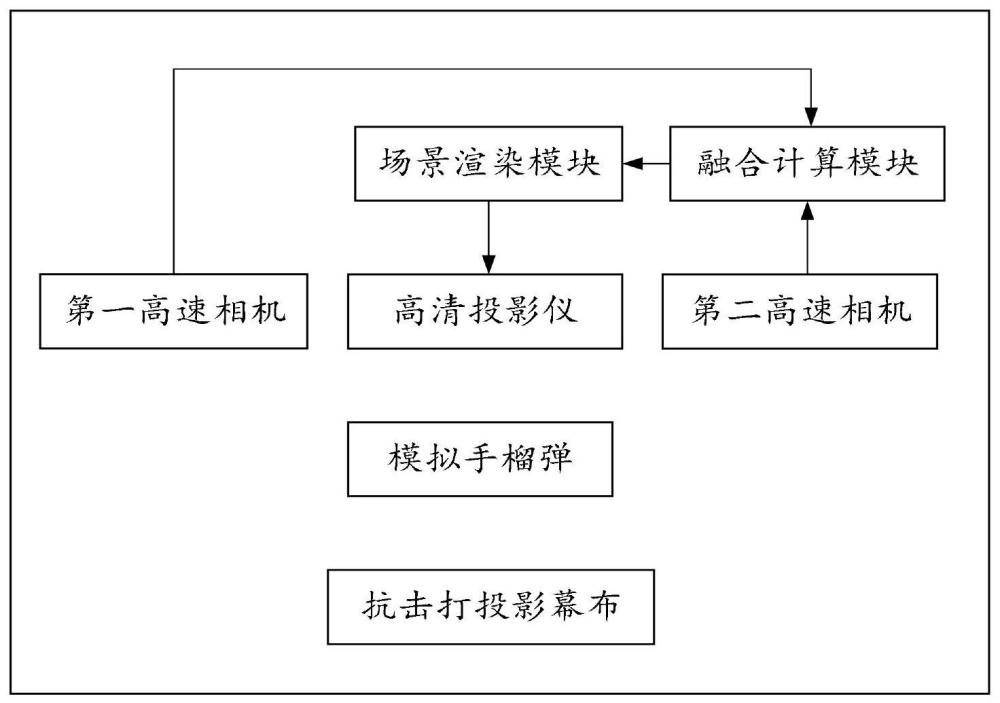
2、为了解决上述技术问题,本发明实施例第一方面公开了一种室内手榴弹投掷模拟系统,所述系统包括第一高速相机、第二高速相机、高清投影仪、融合计算模块、场景渲染模块、抗击打投影幕布和模拟手榴弹;
3、所述第一高速相机和所述第二高速相机,均与所述融合计算模块数据连接,用于设置于所述抗击打投影幕布前方,同步进行采集,分别获取第一图像序列和第二图像序列,并发送至所述融合计算模块;
4、所述融合计算模块,与所述场景渲染模块数据连接,用于基于标定获取的标定参数列表,对所述第一图像序列和所述第二图像序列进行处理,得到落点坐标;
5、所述场景渲染模块,与所述高清投影仪数据连接,用于基于预设的所述虚拟三维环境和目标投掷点坐标,获取第一虚拟环境和第一场景渲染图像,以及基于所述第一虚拟环境、所述目标投掷点坐标和所述落点坐标,获取第二场景渲染图像,并将所述第一场景渲染图像和所述第二场景渲染图像发送至所述高清投影仪;
6、所述高清投影仪,用于设置于所述抗击打投影幕布前方,向所述抗击打投影幕布投射所述第一场景渲染图像和所述第二场景渲染图像;
7、所述抗击打投影幕布,用于设置于所述第一高速相机、所述第二高速相机和所述高清投影仪前方,阻拦投掷出的所述模拟手榴弹,以及展现所述高清投影仪投射出的所述第一场景渲染图像和所述第二场景渲染图像。
8、作为一种可选的实施方式,本发明实施例第一方面中,所述融合计算模块,包括数据融合单元、筛选平滑单元、数据拟合单元和落点计算单元;
9、所述数据融合单元,与所述第一高速相机、所述第二高速相机和所述筛选平滑单元数据连接,用于对所述第一图像序列和所述第二图像序列进行融合处理,得到三维坐标序列和采集时间序列,并发送至所述筛选平滑单元;
10、所述筛选平滑单元,与所述数据拟合单元和所述落点计算单元数据连接,用于对所述采集时间序列和所述三维坐标序列进行处理,得到筛选时间序列和平滑序列集合,并将所述筛选时间序列和所述平滑序列集合发送至所述数据拟合单元,以及将所述筛选时间序列发送至所述落点计算单元;
11、所述平滑序列集合,包括第一平滑序列、第二平滑序列和第三平滑序列;
12、所述数据拟合单元,与所述落点计算单元数据连接,用于基于所述筛选时间序列和平滑序列集合进行拟合处理,得到拟合曲线集合,并发送至所述落点计算单元;所述拟合曲线集合,包括第一拟合曲线、第二拟合曲线、第三拟合曲线和第四拟合曲线;
13、所述落点计算单元,与所述场景渲染模块数据连接,用于基于所述筛选时间序列和所述拟合曲线集合,计算所述落点坐标,并发送至所述场景渲染模块。
14、本发明实施例第二方面公开了一种室内手榴弹投掷模拟方法,所述方法包括:
15、s1,将所述第一高速相机、所述第二高速相机和所述高清投影仪,均设置于所述抗击打投影幕布前方;所述第一高速相机和所述第二高速相机,与所述抗击打投影幕布的距离均为预设的第一距离;
16、s2,对所述第一高速相机和所述第二高速相机进行标定,得到所述标定参数列表;所述标定参数列表,包括第一内参矩阵、第一畸变参数、第二内参矩阵、第二畸变参数、旋转矩阵和平移矩阵;
17、s3,利用所述场景渲染模块,基于预设的所述虚拟三维环境和目标投掷点坐标,获取所述第一虚拟环境和所述第一场景渲染图像;利用所述高清投影仪,将所述第一场景渲染图像投射至所述抗击打投影幕布;
18、s4,利用所述第一高速相机和所述第二高速相机同步采集,分别得到所述第一图像序列和所述第二图像序列;
19、s5,利用所述融合计算模块,基于所述标定参数列表,对所述第一图像序列和所述第二图像序列进行处理,得到所述落点坐标;
20、s6,利用所述场景渲染模块,基于所述第一虚拟环境、所述目标投掷点坐标和所述落点坐标,获取所述第二场景渲染图像;利用所述高清投影仪,将所述第二场景渲染图像投射至所述抗击打投影幕布。
21、作为一种可选的实施方式,本发明实施例第二方面中,所述基于所述标定参数列表,对所述第一图像序列、所述第二图像序列和所述采集时间序列进行处理,得到所述落点坐标,包括:
22、s51,利用所述数据融合单元,基于所述标定参数列表,对所述第一图像序列和所述第二图像序列进行融合处理,得到所述三维坐标序列和所述采集时间序列;
23、s52,利用所述筛选平滑单元,对所述采集时间序列和所述三维坐标序列进行处理,得到所述筛选时间序列和所述平滑序列集合;
24、s53,利用所述数据拟合单元,对所述筛选时间序列和平滑序列集合进行拟合处理,得到所述拟合曲线集合;
25、所述拟合曲线集合,包括第一拟合曲线、第二拟合曲线、第三拟合曲线和第四拟合曲线;
26、s54,利用所述落点计算单元,对所述筛选时间序列和所述拟合曲线集合进行处理,得到所述落点坐标;所述落点坐标包括落点偏移和落点深度。
27、作为一种可选的实施方式,本发明实施例第二方面中,所述基于所述标定参数列表,对所述第一图像序列和所述第二图像序列进行融合处理,得到三维坐标序列和采集时间序列,包括:
28、s511,将中间坐标序列初始化为空序列,并将循环次数i初始化为0;
29、s512,对所述标定参数列表、所述第一图像序列中的第i个所述第一图像,和所述第二图像序列中的第i个所述第二图像进行处理,得到三维坐标;
30、s513,将所述循环次数i加1;
31、s514,将所述三维坐标插入所述中间坐标序列末端;
32、s515,重复m执行s512~s514;
33、s516,确定所述三维坐标序列为所述中间坐标序列;
34、s517,获取所述第一图像序列或所述第二图像序列的时间戳,得到所述采集时间序列。
35、作为一种可选的实施方式,本发明实施例第二方面中,所述对所述采集时间序列和所述三维坐标序列进行处理,得到筛选时间序列和平滑序列集合,包括:
36、s521、预设第二距离和第三距离;所述第一距离、所述第二距离和所述第三距离依次增大;
37、s522、基于所述第二距离和所述第三距离,对所述三维坐标序列和所述采集时间序列进行筛选处理,得到三维筛选序列和所述筛选时间序列;
38、s523、对所述三维筛选序列进行平滑处理,得到三维平滑序列;
39、s524、对所述三维平滑序列进行拆分,得到所述平滑序列集合。
40、作为一种可选的实施方式,本发明实施例第二方面中,所述基于所述第二距离和所述第三距离,对所述三维坐标序列和所述采集时间序列进行筛选处理,得到三维筛选序列和所述筛选时间序列,包括:
41、s5221、获取所述三维坐标序列中,z分量与所述第二距离最接近的三维坐标的序号,得到第一序号;
42、s5222、获取所述三维坐标序列中,z分量与所述第三距离最接近的三维坐标的序号,得到第二序号;
43、s5223、获取所述三维坐标序列中,编号在所述第一序号和所述第二序号之间的所述三维坐标,得到三维筛选序列;
44、s5224、获取所述采集时间序列中,编号在所述第一序号和所述第二序号之间的所述采集时间,得到筛选时间序列。
45、作为一种可选的实施方式,本发明实施例第二方面中,对所述筛选时间序列和平滑序列集合进行拟合处理,得到拟合曲线集合,包括:
46、s531、对所述第一平滑序列和所述筛选时间序列进行第一拟合处理,得到所述第一拟合曲线;
47、s532、对所述第二平滑序列和所述筛选时间序列进行第二拟合处理,得到所述第二拟合曲线;
48、s533、对所述第三平滑序列和所述筛选时间序列进行第三拟合处理,得到所述第三拟合曲线;
49、s534、对所述第一平滑序列和所述第三平滑序列进行第四拟合处理,得到所述第四拟合曲线。
50、作为一种可选的实施方式,本发明实施例第二方面中,所述对所述筛选时间序列和所述拟合曲线集合进行处理,得到落点坐标,包括:
51、s541,分别获取所述筛选时间序列的首尾元素,得到第一时间和第二时间;
52、s542、利用分析时间计算模型,对所述第一时间和所述第二时间进行处理,得到分析时间;
53、所述分析时间计算模型为:
54、t=w(t2-t1)+t1
55、式中,t、t1和t2分别为所述分析时间、所述第一时间和所述第二时间,w为预设的分析系数;
56、s543、分别计算所述第一拟合曲线、所述第三拟合曲线、所述第二拟合曲线和所述第四拟合曲线在所述分析时间处的斜率,得到第一速度、第二速度、第三速度和俯仰斜率;
57、s544、利用初始运动参数计算模型,对所述第一速度、所述第二速度和所述俯仰斜率进行处理,得到初始运动参数;所述初始运动参数包括前进速度和俯仰角;
58、所述初始运动参数计算模型为:
59、
60、式中,v0、v1和v2分别为所述前进速度、所述第一速度和所述第二速度,k0和β分别为所述俯仰斜率和所述俯仰角;
61、s545、对所述前进速度、所述俯仰角、所述俯仰斜率和所述第一距离进行处理,得到落点深度;
62、s546,基于所述第二拟合曲线、所述第三拟合曲线和所述落点深度,获取落点偏移。
63、作为一种可选的实施方式,本发明实施例第二方面中,所述对所述前进速度、所述俯仰角、所述俯仰斜率和所述第一距离进行处理,得到落点深度,包括:
64、s5451,利用距离参数值计算模型,对所述前进速度和所述俯仰角进行处理,得到距离参数值;
65、所述距离参数值计算模型为:
66、
67、式中,k1为所述距离参数值,g为重力加速度,v0为所述前进速度,β为所述俯仰角;
68、s5452,利用落点深度计算模型,对所述俯仰斜率、所述距离参数值、所述第一距离进行处理,得到所述落点深度;
69、所述落点深度计算模型为:
70、
71、式中,d为所述落点深度,h为所述第一距离,k0为所述俯仰斜率。
72、与现有技术相比,本发明实施例具有以下有益效果:
73、(1)通过高清投影仪,将第一场景渲染图像和第二场景渲染图像投射至抗击打投影幕布,使参训人员避免佩戴沉重的虚拟现实设备,并且在模拟手榴弹击中抗击打投影幕布后仍能准确呈现虚拟场景,提高训练的真实性。
74、(2)利用第一高速相机和第二高速相机同步采集,得到第一图像序列、第二图像序列和采集时间序列,经融合处理后,得到三维坐标序列,可以准确获取模拟手榴弹投掷后初期的三维轨迹。
75、(3)基于第二距离和第三距离,对三维坐标序列和采集时间序列进行筛选,得到三维筛选序列和所述筛选时间序列,可以提取双目视觉识别结果中最为准确的部分,从而提高后续投掷轨迹预测的精度;对三维筛选序列进行平滑处理,可以去除数据中的毛刺,进一步提高预测精度。
76、(4)通过对筛选时间序列和平滑序列集合进行拟合处理,得到拟合曲线集合,并对筛选时间序列和拟合曲线集合进行处理,得到落点坐标,从而在模拟手榴弹被抗击打幕布阻拦的情况下,通过轨迹预测获取准确的落点坐标,从而在克服室内训练场地限制的同时,提高了真实性和准确性;
77、(5)利用模拟手榴弹替代真实手榴弹,并利用抗击打幕布阻拦投掷出的模拟手榴弹,提高了训练过程的安全性,且避免了对周围设施的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240802/235544.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。