一种可控黏脱附的仿生黏附材料及其制备方法与流程
- 国知局
- 2024-08-02 12:27:21
本发明涉及仿生黏附材料,具体为一种可控黏脱附的仿生黏附材料及其制备方法。
背景技术:
1、能够按照需求实现黏附和脱附的仿生黏附材料在现代工业中发挥着重要的作用,也越来越受到人们的关注。在机器人技术中,机械臂拾取和放置的动作、机器人在墙壁上攀爬和停留的动作都与黏附材料的黏附和脱附功能相对应。在转印技术中,黏附力可调的黏附材料可以将小尺寸微纳米材料转移到任意基材上。此外,可逆黏附材料也常用于柔性电子传感器与人体皮肤的紧密贴合。因此,能够根据需要实现黏附力可逆和可控的黏附材料在现代工业中具有广阔的运用前景。
2、通过控制电场、磁场、温度、光等外部环境的状态是实现黏附材料黏/脱附切换的常见方法。例如,武汉大学薛龙建教授开发了一种由聚氨酯(pu)作为背衬层和石墨烯/形状记忆聚合物(gsmp)作为柱阵列的黏附材料。并利用gsmp在uv光的照射下会发生相变的特性实现了黏附材料在高黏附状态(uv off)与低黏附状态(uv on)之间进行切换。此种黏附材料在粗糙度范围较高的表面上具有良好的可逆黏附性,不过此种方式需要额外的uv光照设备,且光照也具有一定的延时性。cn109632633b公开了一种具备可控粘附特性的磁敏橡胶,在受到外加磁场的激励作用时,磁敏橡胶内部的铁磁颗粒相互作用,使其弹性模量、表面形貌等发生变化,从而导致其粘附特性发生改变。这种通过控制外部磁场实现粘附性能可逆变化的方法为黏附材料的吸附-脱附方式提供了一种新的解决方法。不过施加磁场所需的外部装置可能复杂化黏附系统,且磁场也可能对装置中的元器件产生影响。cn218287228u公开了一种基于形状记忆聚合物的可控粘附微转印印章,使用时,通过部署能量发生装置与施加外部载荷,印章表面微结构凸起部会发生记忆形变,致形变前后界面粘附力大小发生改变。这种微转印印章结构增强了转印过程的可控性且通用性好,适用于具有各种特性的微电子器件。不过同样的,能量发生装置的存在可能复杂化黏附系统,而实现可逆过程的升温降温过程也可能极大的影响“高黏附状态”与“低黏附状态”之间的切换时间;
3、综上所述,开发具有优异性能的可切换黏附材料仍然是一项挑战。
技术实现思路
1、本发明的目的在于提供一种可控黏脱附的仿生黏附材料及其制备方法,以解决上述背景技术中提出的问题。
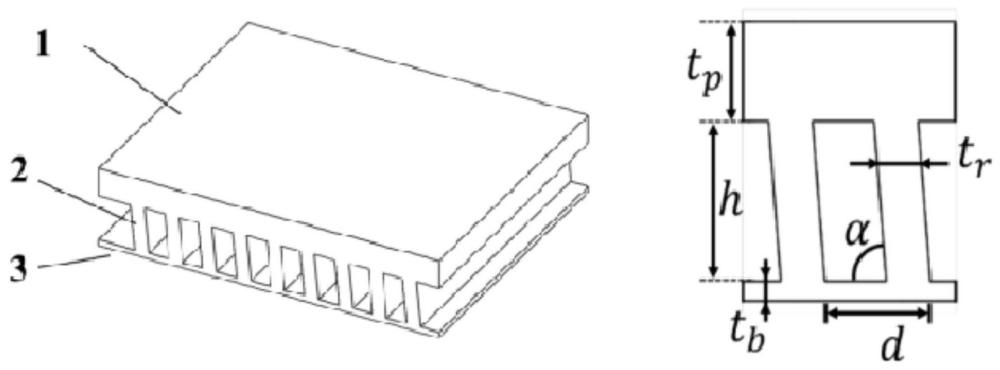
2、为实现上述目的,本发明提供如下技术方案:一种可控黏脱附的仿生黏附材料,包括背衬层、中间层和底层;所述背衬层底面连接有中间层,所述中间层由呈阵列排布的长条组成,所述中间层连接有底层。
3、优选的,所述背衬层可固定于各种机器表面,背衬层形状可以适应对应的机器表面,所述背衬层的材质为橡胶、凝胶、碳、硅、纤维素、树脂、金属和陶瓷中的任意一种或几种组合。
4、优选的,所述中间层内设有微结构单元,所述中间层中微结构单元的形状为四边形棱柱。
5、优选的,所述底层与被作用物体直接接触;所述背衬层为实心结构和多孔结构中的任意一种或两种组合,所述背衬层、中间层和底层为一次加工或分开加工后再粘合至一起。
6、一种可控黏脱附的仿生黏附材料的制备方法,包括以下步骤:
7、a、制备背衬层与中间层的结合体:
8、根据设计方案确定背衬层的形状、尺寸要求以及背衬层上设置的四边形棱柱阵列的形状、尺寸以及阵列方式的要求,并根据以上要求设计制作模板,将聚合物的预聚体置于上述模板中进行充分填充后固化并脱模,最终可得到背衬层与中间层的结合体;
9、b、将背衬层与中间层的结合体与底层粘连:
10、将聚合物的预聚体旋涂在光滑的基底上,再将步骤a中制备的结合体中的中间层未与背衬层连接的那一端平整地贴合在上述光滑基底上的预聚体中,保证柱子之间相互独立没有粘结且所有柱子末端均与预聚体充分接触,固化成型后裁剪得到一种通过压力诱导实现可控黏脱附的仿生黏附材料。
11、优选的,所述背衬层材质为橡胶、凝胶、碳、硅、纤维素、树脂、金属、陶瓷中的任意一种或几种的组合。
12、优选的,所述中间层的形状为四边形,中间层的材质为天然橡胶、人工橡胶、聚氨酯、聚酰亚胺、聚烯烃、聚乳酸、聚己内酯、水凝胶、气凝胶、油凝胶中的任意一种或几种组合。
13、优选的,所述底层粘连或不粘连微结构。
14、优选的,所述背衬层与中间层的结合体经一次加工或分开加工后再粘合到一起;所述背衬层与中间层的结合体和底层经一次加工或分开加工后再粘合到一起。
15、优选的,所述背衬层与中间层的结合体和底层的材料相同或不同,材料的模量相同或不同。
16、与现有技术相比,本发明的有益效果是:
17、1、本发明制备的一种可控黏脱附的仿生黏附材料只需通过调节一维方向上的法向预压力就可以得到不同的黏附力,从而简化了可切换的黏附机制。
18、2、本发明制得的可控黏脱附的仿生黏附材料可运用于芯片制造、智能医疗、多功能机器人以及航空航天等高精尖科技领域,如晶圆搬运、机器人软抓手等,运用前景广泛。
技术特征:1.一种可控黏脱附的仿生黏附材料,其特征在于,包括背衬层(1)、中间层(2)和底层(3);所述背衬层(1)底面连接有中间层(2),所述中间层(2)由呈阵列排布的长条组成,所述中间层(2)连接有底层(3)。
2.根据权利要求1所述的一种可控黏脱附的仿生黏附材料,其特征在于:所述背衬层(1)可固定于各种机器表面,背衬层(1)形状可以适应对应的机器表面,所述背衬层(1)的材质为橡胶、凝胶、碳、硅、纤维素、树脂、金属和陶瓷中的任意一种或几种组合。
3.根据权利要求1所述的一种可控黏脱附的仿生黏附材料,其特征在于:所述中间层(2)内设有微结构单元,所述中间层(2)中微结构单元的形状为四边形棱柱。
4.根据权利要求1所述的一种可控黏脱附的仿生黏附材料,其特征在于:所述底层(3)与被作用物体直接接触;所述背衬层(1)为实心结构和多孔结构中的任意一种或两种组合,所述背衬层(1)、中间层(2)和底层(3)为一次加工或分开加工后再粘合至一起。
5.根据权利要求1-4任意一项所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于:所述背衬层(1)材质为橡胶、凝胶、碳、硅、纤维素、树脂、金属、陶瓷中的任意一种或几种的组合。
7.根据权利要求5所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于:所述中间层(2)的形状为四边形,中间层(2)的材质为天然橡胶、人工橡胶、聚氨酯、聚酰亚胺、聚烯烃、聚乳酸、聚己内酯、水凝胶、气凝胶、油凝胶中的任意一种或几种组合。
8.根据权利要求5所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于:所述底层(3)粘连或不粘连微结构。
9.根据权利要求5所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于:所述背衬层(1)与中间层(2)的结合体经一次加工或分开加工后再粘合到一起;所述背衬层(1)与中间层(2)的结合体和底层(3)经一次加工或分开加工后再粘合到一起。
10.根据权利要求5所述的一种可控黏脱附的仿生黏附材料的制备方法,其特征在于:所述背衬层(1)与中间层(2)的结合体和底层(3)的材料相同或不同,材料的模量相同或不同。
技术总结本发明属于仿生黏附材料技术领域,具体公开了一种可控黏脱附的仿生黏附材料及其制备方法,包括背衬层、中间层和底层;所述背衬层底面连接有中间层,所述中间层由呈阵列排布的长条组成,所述中间层连接有底层;所述背衬层可固定于各种机器表面,背衬层形状可以适应对应的机器表面,所述背衬层的材质为橡胶、凝胶、碳、硅、纤维素、树脂、金属和陶瓷中的任意一种或几种组合;本发明制备的一种可控黏脱附的仿生黏附材料只需通过调节一维方向上的法向预压力就可以得到不同的黏附力,从而简化了可切换的黏附机制。技术研发人员:姬科举,姬原鸣,涂冲文,吴建铭,王喜鹏,邓凯,刘静受保护的技术使用者:南京艾德恒信科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240802/236169.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表