一种基于一致性和特异性子空间的多视图多标签分类方法
- 国知局
- 2024-08-08 16:58:00
本发明涉及多视图多标签子空间,特别涉及一种基于一致性和特异性子空间的多视图多标签分类方法。
背景技术:
1、现代应用越来越需要多标记分类方法,如蛋白质功能分类、音乐分类和语义场景分类。在语义场景分类中,一张照片可以同时属于多个概念类别,例如日落和海滩。类似地,在音乐分类中,一首歌可能属于多个流派。多标记学习技术用于处理真实世界中具有多义性的对象,已经成为一种经典的学习范式。
2、现实生活的数据通常是用不同的测量方法收集的,单视图数据无法全面描述样本的完整信息。例如,图像的颜色信息和纹理信息是两种不同的特征,可以视为两个视图数据。充分利用来自多个视图的信息具有重要意义。随着多视图数据在现实世界的应用中变得越来越广泛,多视图学习引起了人们的极大关注。
3、数据呈现多视图性与多标记性等特征使得传统的数据分析理论、方法与技术面临有效性、准确性与可计算性等严峻挑战。因此,研究基于一致性和特异性子空间学习的多视图多标记分类方法,有利于构建更为准确可靠的学习模型,有利于发挥人工智能技术的优势促进交叉学科共同发展和繁荣。
技术实现思路
1、本发明提供一种基于一致性和特异性子空间的多视图多标签分类方法,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种基于一致性和特异性子空间的多视图多标签分类方法,具体步骤为:
4、s1.获取多视图多标记数据集,进行预处理;
5、s2.通过核函数将数据集的各个实例的特征向量映射到高维空间;
6、s3.基于多视图数据的一致性和特异性构造子空间并利用每个信息源的特征表征及其类别信息分别构造特征流形和标记流形结构;
7、s4.迭代优化目标函数,得到最优多视图子空间表征;
8、s5.将待处理的多视图多标记数据输入到具有模型中进行分类并与相应的预测结果对比来评价所提算法的性能。
9、进一步的,步骤s1具体包括:
10、s11.采用公开数据集corel5k、pascal07、espgame中的gist、rgb、lab、hsv、harrishue、harrissift描述算子作为多视图表示;每个视图其中是第v个视图中第i个样本的dv维特征向量;
11、s12.对于多标记数据的标记,记为{l1,l2....,lq}(1≤j≤q);其中lj为第j个类别,q为标记类别的总数;
12、s13.采用五折交叉验证方法对算法进行验证:将处理好的标准化数据按照8:2的比例进行划分为训练数据和测试数据。
13、进一步的,步骤s2具体包括:
14、s21.我们使用一个非线性函数φ(·)(在这里设置为rbf核函数,也可以选用其他核函数)将各个视图的特征空间映射到高维希尔伯特空间转换视图数据x(v)到φ(x(v));然后我们用表示视图v中数据样本i和数据样本j之间的相似性,其计算公式为:
15、
16、s22.重复步骤s21,分别得到基于每个视图的核矩阵k(v)。
17、进一步的,步骤s3具体包括:
18、s31.利用多视图的一致性和特异性,构建以下优化目标函数进行求解:
19、
20、其中,c是一致性子空间;||·||*表示核范数,定义为非零奇异值之和;核范数能保证低秩性质,并很好地保留空间结构和高阶信息,以增强学习的一致子空间的鲁棒性;是l2范数,对特异性子空间s(v)施加l2范数约束,旨在捕捉每个视图中的独有属性;
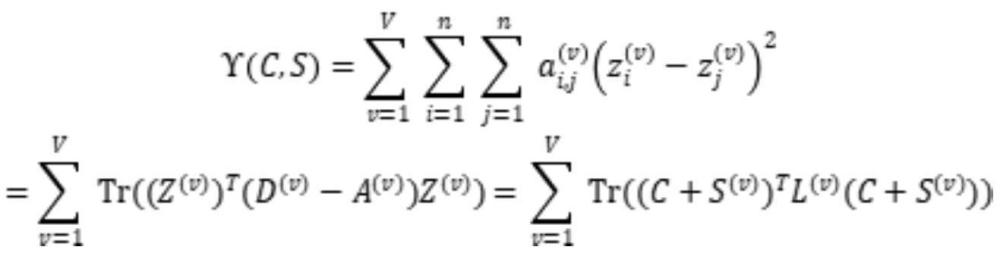
21、s32.由于理论上每个特征都可以用其相邻特征来表示,使用稀疏表示恢复这样的特征流形,计算公式为:其中,h-i=[h1,...,hi-1,hi+1,...,hd]是除hi之外的特征集;是对特征相关性建模的重构系数矩阵,λ用以平衡重构误差和稀疏正则项l1范数;在重构系数矩阵a的帮助下,特征流形的底层几何结构可以被进一步发掘:
22、
23、其中tr(·)是迹,矩阵的迹表示矩阵主对角线所有元素的和;l(v)=d(v)-a(v)是第v个视图的拉普拉斯矩阵,d(v)是的对角矩阵;
24、s33.进一步捕获多个标记的标记相关性;类似地,我们将稀疏表示应用于标记关系的重构,即每个标记与其他标记之间的高阶相关性,求解公式为:其中,
25、p-i=[p1,...,pi-1,pi+1,...,pl]是除pi之外的标记集;是对标记相关性建模的重构系数矩阵,τ用以平衡重构误差和稀疏正则项l1范数;在重构系数矩阵b的帮助下,标记流形的底层几何结构可以被进一步发掘:
26、
27、进一步的,步骤s4具体包括:
28、s41.基于步骤s3,得出总的优化函数:
29、
30、s42.由于核范数的优化是非常困难的,对c进行优化之前需要进行凸松弛;具体来说,假设一个变量j作为c的替代,求解公式变成:
31、
32、s.t.c=j
33、这个问题可以通过增强拉格朗日算法方法进行求解;等效的增广拉格朗日函数可以写成:
34、
35、其中<·,·>是frobenius内积,<q,v>=tr(qtv);μ>0是正则化项参数,m是拉格朗日乘子;求解c的导数并将其设置为零,得到以下方程:
36、pcc+cqc=zc
37、其中pc=μi+((k(v))tk(v)+λ4(l(v)+(l(v))t)),
38、;该方程是一个典型的sylvester方程,可以通过bartels-start算法求解;
39、s43.为了更新c,引入了中间变量j,j的求解公式为:
40、
41、该问题可以通过singular value threshold方法来解决;具体来说,给定
42、
43、u和v是酉矩阵,∑=diag{σi}是奇异值矩阵;则j可以由以下公式进行更新:
44、其中dε(x)=ddiag{max(|x|-ε,0)};
45、s44.固定其他参数,求解s的导数并将其设置为零,得到以下方程:
46、u1s(v)+s(v)u2=u3
47、其中u1=2λ2i+2(k(v))tk(v)+λ3(l(v)+(l(v))t),u2=2λ4(i-bt-b+bbt),u3=2(k(v))t(k(v)c-y)+λ3(l(v)+(l(v)t)c+2λ4c(i-bt-b+bbt));该方程是一个典型的sylvester方程,可以通过bartels-start算法求解;
48、s45.固定其他参数,对拉格朗日乘子m进行求解,求解公式为:
49、m(t+1)=m(t)+μ(c-j)
50、s46.重复步骤s42-s45,直到优化目标收敛,返回一致性子空间表征c和特异性子空间表征s。
51、进一步的,步骤s5具体包括:
52、利用所提方法对测试数据集的类别标记进行预测,求解公式为:
53、
54、其中ypre是分类的预测结果,是基于测试集的核矩阵;采用以下四个指标对所提算法的性能进行评价:
55、a.汉明损失:用于考察样本在单个标记上的误分类情况,该评价指标越小越好;
56、b.覆盖率:用于考察在样本的类别标记排序序列中,覆盖所有相关标记所需的搜索深度情况,该评价指标越小越好;
57、c.排序损失:用于考察在样本的类别标记排序序列中出现排序错误的情况,该评价指标越小越好;
58、d.平均精度:用于考察在样本的类别标记排序序列中,排在相关标记之前的标记仍为相关标记的情况,该评价指标越大越好。
59、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
60、1、本发明提供一种基于一致性和特异性子空间的多视图多标签分类方法,能够构造并融合一致性和特异性子空间信息的同时利用特征流形和标记流形,为多视图多标记数据的分类提供参考。
61、2、本发明提供一种基于一致性和特异性子空间的多视图多标签分类方法,所提出方法在几个权威的基准数据集上性能优秀,获得了更加准确可靠的分类结果。
62、3、本发明提供一种基于一致性和特异性子空间的多视图多标签分类方法,能提供高精度的分类结果,为多视图多标记分类难题提供依据。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271507.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表