一种自动包装设备用瓶子柔性运送装置的制作方法
- 国知局
- 2024-08-08 17:10:00
本技术涉及一种自动包装设备用瓶子柔性运送装置,属于瓶子运送。
背景技术:
1、目前在瓶子自动包装机械技术领域所使用的进出瓶方式中, 普遍使用的是螺旋和拨轮及同步链和拨轮两种组合。
2、螺旋和拨轮的进出瓶方式存在以下弊端:
3、1.由于需根据瓶子定制螺旋槽及拨轮齿所以适应瓶型单一。
4、2.对于形状较复杂的瓶子适应性差。
5、3.由于工作原理导致会对瓶子存在摩擦,对烤花的瓶子易造成损伤。
6、同步链和拨轮的进出瓶方式存在以下弊端:
7、1.同步链进瓶由于工作原理限制了生产线速度,无法满足高速生产。
8、2.拨轮齿需根据瓶子定制适应瓶型单一。
9、3.拨轮由于工作原理导致会对瓶子存在摩擦,对烤花的瓶子易造成损伤。
10、以上两种组合均不能解决多瓶型、防磨损、高速度的进出瓶需求。
11、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、本实用新型针对背景技术中的不足,提供一种自动包装设备用瓶子柔性运送装置,可以提高运送的速度,在运送过程中可以避免对瓶子的摩擦,防止磨损瓶子。
2、为解决以上技术问题,本实用新型采用以下技术方案:
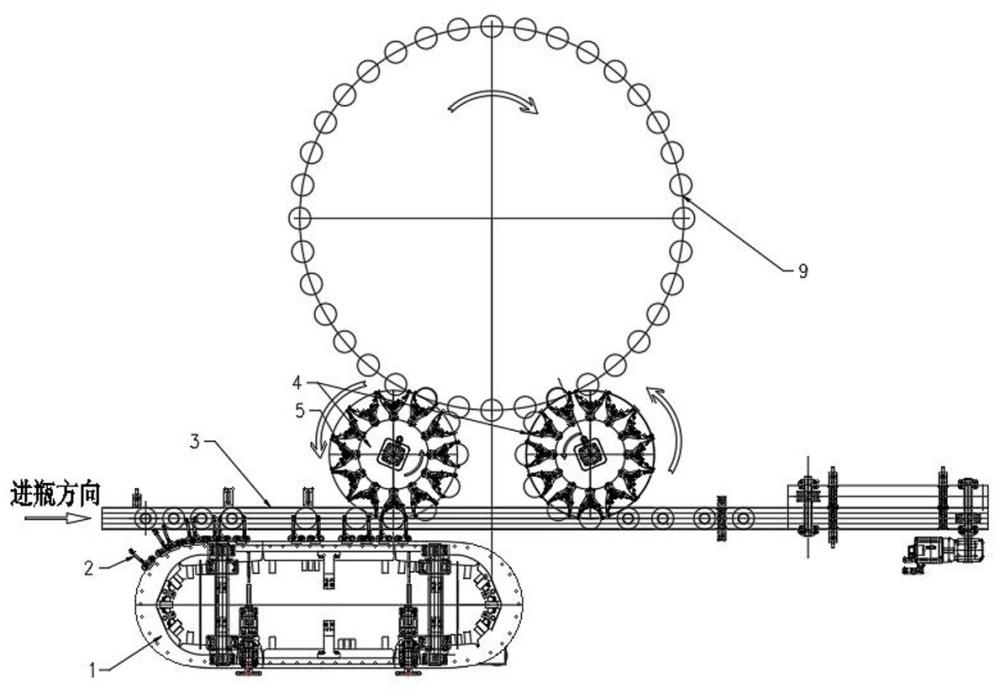
3、一种自动包装设备用瓶子柔性运送装置,包括输送线和磁悬浮轨道,磁悬浮轨道上设有成对设置的磁悬浮动子,所述磁悬浮动子在磁悬浮轨道上运行;所述磁悬浮动子上安装有夹具,成对的磁悬浮动子上的两个夹具夹持住瓶子逐个向前输送;
4、还包括夹持拨轮装置,夹持拨轮装置包括多个夹爪机构,夹爪机构抓取由夹具输送来的瓶子。
5、进一步地,多个夹爪机构呈一圈排布。
6、进一步地,所述夹持拨轮装置包括支撑块,支撑块的上下两端的外侧分别铰接有两个爪子,用于抓取瓶子。
7、进一步地,支撑块上贯穿设有两个滑动杆,滑动杆的内端铰接有两个连杆,两个连杆的一端铰接在滑动杆上,另一端分别铰接在爪子上,滑动杆滑动可以带动两个爪子闭合和分开,实现通过爪子抓取和松开瓶子。
8、进一步地,夹持拨轮装置还包转盘,所述夹爪机构活动安装在转盘上。
9、支撑块的两端固定分别固定有有连接板,所述连接板铰接在转盘上。
10、进一步地,转盘的中间位置设有中心柱,中心柱的中间部位设有凸起部。
11、进一步地,所述滑动杆位于支撑块内侧的部分套装有压缩弹簧,滑动杆的内端安装有滚轮,所述滚轮与中心柱的中间部位相配合,夹爪机构转动时,滚轮可以推动滑动杆滑动。
12、进一步地,所述爪子为塑料材质。
13、本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
14、夹爪机构在驱动装置的带动下转动,将空瓶送至灌装工位,灌装工位对空瓶进行灌装,灌装后的瓶子通过灌装工位送至另一个夹持拨轮装置处,完成瓶子运送;通过磁悬浮轨道上的夹具和夹爪机构连续不断地抓取瓶子,提高了运送的速度,在运送过程中可以避免对瓶子的摩擦,防止磨损瓶子。
15、下面结合附图和实施例对本实用新型进行详细说明。
技术特征:1.一种自动包装设备用瓶子柔性运送装置,其特征在于:包括输送线(3)和磁悬浮轨道(1),磁悬浮轨道(1)上设有成对设置的磁悬浮动子,所述磁悬浮动子在磁悬浮轨道(1)上运行;所述磁悬浮动子上安装有夹具(2),成对的磁悬浮动子上的两个夹具(2)夹持住瓶子逐个向前输送;
2.如权利要求1所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:多个夹爪机构(5)呈一圈排布。
3.如权利要求1所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:所述夹持拨轮装置(4)包括支撑块(503),支撑块(503)的上下两端的外侧分别铰接有两个爪子(501),用于抓取瓶子。
4.如权利要求3所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:支撑块(503)上贯穿设有两个滑动杆(504),滑动杆(504)的内端铰接有两个连杆(502),两个连杆(502)的一端铰接在滑动杆(504)上,另一端分别铰接在爪子(501)上,滑动杆(504)滑动可以带动两个爪子(501)闭合和分开,实现通过爪子(501)抓取和松开瓶子。
5.如权利要求4所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:夹持拨轮装置(4)还包括转盘(6),所述夹爪机构(5)活动安装在转盘(6)上;
6.如权利要求5所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:转盘(6)的中间位置设有中心柱(7),中心柱(7)的中间部位设有凸起部(8)。
7.如权利要求6所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:所述滑动杆(504)位于支撑块(503)内侧的部分套装有压缩弹簧,滑动杆(504)的内端安装有滚轮(505),所述滚轮(505)与中心柱(7)的中间部位相配合,夹爪机构(5)转动时,滚轮(505)可以推动滑动杆(504)滑动。
8.如权利要求3所述的一种自动包装设备用瓶子柔性运送装置,其特征在于:所述爪子(501)为塑料材质。
技术总结本技术公开了一种自动包装设备用瓶子柔性运送装置,包括输送线和磁悬浮轨道,磁悬浮轨道上设有成对设置的磁悬浮动子,所述磁悬浮动子在磁悬浮轨道上运行;所述磁悬浮动子上安装有夹具,成对的磁悬浮动子上的两个夹具夹持住瓶子逐个向前输送;还包括夹持拨轮装置,夹持拨轮装置包括多个夹爪机构,夹爪机构抓取由夹具输送来的瓶子。本技术可以提高运送的速度,在运送过程中可以避免对瓶子的摩擦,防止磨损瓶子。技术研发人员:王凤仪,李永喜,栾鑫受保护的技术使用者:安丘市鼎正机械设备有限公司技术研发日:20231031技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/272778.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。