一种解决在突发事件影响下的船舶排放时间序列预测方法
- 国知局
- 2024-08-19 14:26:11
本发明涉及船舶排放时间序列预测研究,具体而言,尤其涉及一种解决在突发事件影响下的船舶排放时间序列预测方法。
背景技术:
1、随着全球航运总量的增加,船舶排放已成为全球许多国家和国际组织关注的主要问题。为了对船舶排放进行多方面的监管,并减轻污染物和温室气体在不同时间范围内的影响,迫切需要在管辖范围内进行精确的排放计算和有效的时间序列预测。
2、近年来,随着船舶装备技术的不断发展,基于船舶自动识别系统(ais)数据的自下而上的方法逐渐成为最广泛使用的船舶排放量估算方法。现有研究使用ais数据中的船舶编号匹配劳氏数据库中的发动机功率,并利用ais数据中的动态航速分析了考虑船舶主机和辅机功率的九种碳排放估算方法,认为最可靠的方法是船舶交通排气评估模型(steam)。此外,为解决劳氏数据缺失以及ais轨迹点缺失的问题,部分研究提出了基于随机森林的数据库迭代修复算法和基于密度的带噪声应用空间聚类技术。而到目前为止,时间序列预测任务的技术发展已经经历了从统计学模型到机器学习模型,再到深度学习模型的三个发展阶段。在较为复杂的时间序列预测任务中,各种深度学习模型被广泛应用,其中递归神经网络模型(rnn)是一种专门用于时间序列预测的深度学习模型,它的循环结构有助于记忆时间序列数据中的必要信息。在rnn的基础上,记忆门、遗忘门以及输出门的三门结构被提出,进一步发展为长短记忆网络模型(lstm)。lstm很好地解决了rnn梯度消失和梯度爆炸的问题,同时利用三门结构有效地学习有价值的信息。对于复杂的时间序列数据,有大量研究表明卷积神经网络模型(cnn)的卷积操作在提取复杂信息时能达到较好的效果。除了上述深度学习模型,transformer可以说是目前最成功的序列建模框架,其在自然语言处理、计算机视觉以及时间序列任务中具有很好的性能表现。
3、尽管上述研究为船舶排放时间序列预测研究提供了宝贵的资料和见解,但仍有一些研究空白需要填补:
4、1、缺乏准确辨识船舶航行状态的技术,从而影响用于估算船舶排放的模型的准确性和分辨率。
5、2、缺少针对船舶排放时间序列预测任务的研究。
6、3、在时间序列预测任务的实际应用中,突发事件影响的问题并未得到实质性解决,导致大量模型在实际工程应用中存在缺陷。
技术实现思路
1、根据上述提出当前船舶排放时间序列预测研究不足的现状,为提高突发事件影响下船舶排放预测的准确性,本发明提供一种解决在突发事件影响下的船舶排放时间序列预测方法。本发明首先提出了一种实时的船舶排放计算框架,即利用劳氏船舶技术规范数据库及ais轨迹数据更新船舶基本信息库。其次,基于提出的基于船舶时空轨迹的航行状态辨识算法准确地识别船舶航行状态。然后,再引入具有高抗性的深度学习模型,进而有效预测新冠疫情影响下某海域内船舶排放量的时间序列。最后,通过对2019年至2020年中国渤海湾水域的案例分析,验证了模型的有效性和适用性。
2、本发明采用的技术手段如下:
3、一种解决在突发事件影响下的船舶排放时间序列预测方法,包括:
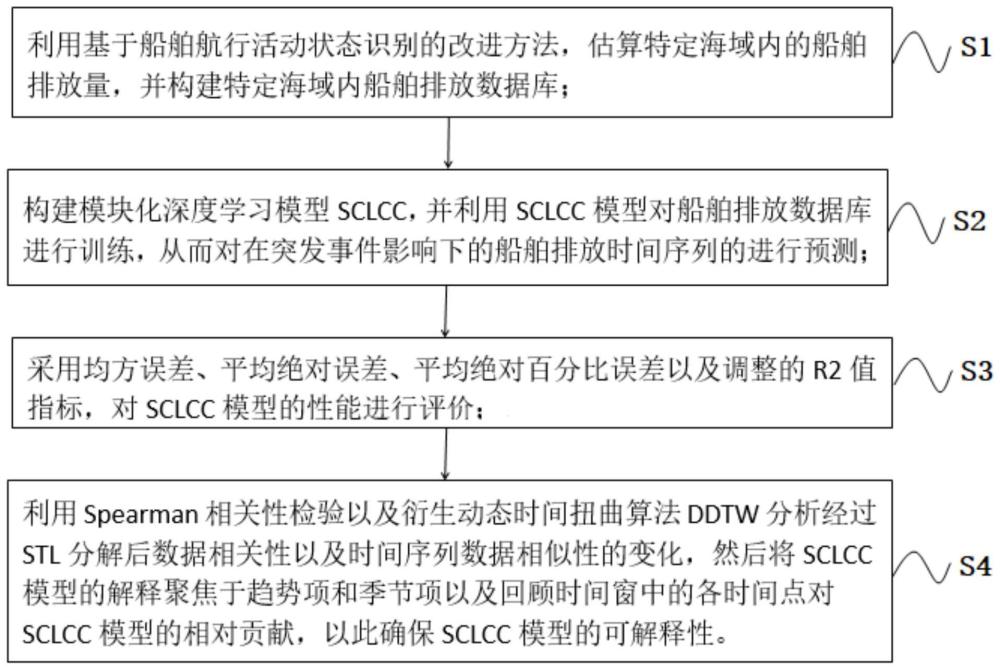
4、s1、利用基于船舶航行活动状态识别的改进方法,估算特定海域内的船舶排放量,并构建特定海域内船舶排放数据库;
5、s2、基于滚动结构的季节-趋势分解技术stl、堆叠的长短记忆网络stacked-lstm和卷积神经网络cnn及综合预测结构cf,构建模块化深度学习模型sclcc,并利用sclcc模型对船舶排放数据库进行训练,从而对在突发事件影响下的船舶排放时间序列的进行预测;
6、s3、采用均方误差、平均绝对误差、平均绝对百分比误差以及调整的r2值指标,对sclcc模型的性能进行评价;
7、s4、利用spearman相关性检验以及衍生动态时间扭曲算法ddtw分析经过stl分解后数据相关性以及时间序列数据相似性的变化,然后将sclcc模型的解释聚焦于趋势项和季节项以及回顾时间窗中的各时间点对sclcc模型的相对贡献,以此确保sclcc模型的可解释性。
8、进一步地,步骤s1,具体包括:
9、s11、利用修复的劳氏船舶技术规范数据库stsd,与ais数据中的船舶编号进行匹配,修补ais数据中的船舶基本信息;
10、s12、基于修补的ais轨迹数据,采用改进的基于ais的轨迹搜索算法stsa对船舶航行状态进行辨识;
11、s13、利用steam模型对船舶排放强度进行计算,从而实现以较高的时间分辨率构建特定海域内船舶排放数据库。
12、进一步地,步骤s12中,改进的基于ais的轨迹搜索算法stsa以船舶轨迹中时空连续的子轨迹为基本单元进行船舶状态辨识,具体过程如下:
13、将船舶轨迹表示为nt={pn={ln,tn}|n∈[1,n]},其中,pn表示时空坐标,包含时间和空间要素;n表示这些时空坐标的数量,按时间顺序排列;每个时空坐标包括ln=(lan,lon),lon和lan分别代表经度和纬度;tn表示相应的时间戳;设定时空坐标搜索数阈值λ;
14、考虑不同航行状态下船舶的运动特征,stsa算法将四种航行状态分为停泊、航行和巡航三类,辨识过程包括:确定停泊子轨迹,以区分靠泊和锚泊;从其余子轨迹中识别出航行状态,以区分航行和巡航;在识别出的巡航子轨迹中区分慢速航行和正常巡航。
15、进一步地,所述辨识过程中,确定停泊子轨迹,以区分靠泊和锚泊,具体包括:
16、引入系泊状态识别子算法,根据特定的时间和空间阈值来确定船舶轨迹代表的是锚泊状态还是靠泊状态,具体公式如下:
17、
18、
19、
20、式中,dis(pi,pm)表示船舶时空坐标pi和pm之间的空间距离,根据经纬度坐标精确计算船舶漂移距离;ξdis表示系泊状态识别的空间距离阈值,ξa和ξb分别表示识别锚泊和靠泊的空间距离阈值;δt(pi,pm)表示船舶时空坐标pi和pm之间的周期;τdis是系泊状态识别的阈值;τa,τb分别表示识别锚泊和靠泊的阈值时间间隔。
21、进一步地,所述辨识过程中,从其余子轨迹中识别出航行状态,以区分航行和巡航,具体包括:
22、使用航行状态识别子算法来识别船舶航行状态,利用航迹中船舶航向的变化来识别机动航行,计算航向变化的公式如下:
23、c(pi,pm)=(xm-xi,ym-yi,zm-zi)
24、xi=r×cos(loi)×cos(lai)
25、yi=r×cos(loi)×sin(lai)
26、zi=r×sin(lai)
27、
28、式中,c(pi,pm)表示时空坐标pi和pm之间的航向;δc(pi,pj,pm)表示航向c(pi,pj)和c(pi,pm)之间的航向变化角度;c(pi,pj)表示初始航向;pi表示子轨迹的初始时空坐标;pj表示与初始时空坐标存在航向偏差的第一个时空坐标;
29、
30、δc(pi,pj,pe)≥η
31、式中,子轨迹pe的终点snt是与初始航向相比航向角变化最大的时空坐标;η为航向变化角阈值,pe为子轨迹终点;如果没有发现更大的角度,且航向差角度能满足公式δc(pi,pj,pe)≥η,则snt(pi,pe)轨迹被归类为机动航行状态;否则,被归类为巡航状态。
32、进一步地,所述辨识过程中,在识别出的巡航子轨迹中区分慢速航行和正常巡航,具体包括:
33、使用巡航状态识别子算法来识别船舶巡航状态,巡航状态识别子算法依靠子轨迹的平均航速进行巡航状态识别;根据国际海事组织(imo)的标准,当航速在12节及以下时,船舶被认定为处于慢速巡航状态;反之,则被归类为正常巡航状态,具体的条件公式如下:
34、
35、
36、符合上述公式条件的子轨迹被认定为正常巡航状态,而不符合这些标准的子轨迹则被认定为慢速巡航状态;式中,v(pi,pj)表示时空坐标之间的船速;δt(pi,pj)表示时空坐标之间的时间差;表示子轨迹snt(pi,pk)的平均速度;pk表示子轨迹的终点。
37、进一步地,步骤s2,具体包括:
38、s21、设定海域的船舶排放时间序列为其中,xt表示t时该海域船舶的排放量,dt是排放时间序列长度;总体目标是基于过去的信息学习一个预测未来x的函数;
39、s22、在滚动时间窗的设置下,编码器长度为dlb,解码器长度为dfh,目标是学习每对编码器和解码器之间共同的非线性映射关系,表达式如下:
40、
41、式中,t是滚动时间窗的开始时间,表示过去时间观察到的排放量;表示预测的未来的排放量;表示每对编码器和解码器之间共同的非线性映射关系;
42、s23、基于滚动结构的季节-趋势分解技术stl,利用数据增强技术将时间序列数据分解为可学习的趋势项和季节项,以及不可学习的残差项;stl算法主要由内层循环和外层循环两部分组成,内层循环用于分离趋势项和季节项,外层循环用于计算鲁棒性权重,在stl的基础上采用滚动分解的方式对步骤s1所得的数据库进行学习,以避免数据泄漏;
43、s24、利用堆叠的长短记忆网络stacked-lstm学习趋势项信息,提取时间序列数据的趋势成分并简化信息;
44、s25、使用无池化层的卷积神经网络cnn来提取季节项的时间序列信息;
45、s26、采用综合预测结构cf合并趋势和季节数据,以进行最终预测;采用一维卷积层和连接层,为趋势和季节信息分配不同的权重,获取综合时间序列数据后,利用全连接前馈神经网络推断所学知识,预测未来碳排放量,如下:
46、trend=trend*wtrend
47、seasonal=seasonal*wseasonal
48、timeseries=concat[trend,seasonal]
49、
50、式中,trend和seasonal分别表示学习到的趋势项和季节项信息;timeseries表示综合的时间序列信息;wtrend和wseasonal表示卷积层的权重;*表示卷积操作;concat[]表示连接操作;(wfc1,wfc2,…,wfcn)表示全连接层的权重;(bfc1,bfc2,…,bfcn)表示全连接层的偏置;δ()表示激活函数。
51、进一步地,步骤s3中:
52、所述均方误差是指衡量预测值与地面实况值之间平方差的平均值,但对异常值比较敏感;平均绝对误差是指计算绝对误差的平均值,受异常值的影响较小,但可能会低估误差大小;平均绝对百分比误差是指通过平均绝对差值与真实值之间的比率来评估相对误差;均方误差、平均绝对误差以及平均绝对百分比误差的值越小越好;调整后的r2值是指能衡量模型与时间序列数据的拟合程度,同时考虑测试集的大小;它的数值越接近1表示拟合程度越好。
53、进一步地,步骤s4,具体包括:
54、s41、将相对贡献以ψts,ψlb表示,相对贡献率范围保持在0-100%之间;
55、s42、将评价指标的变化求平均,得到绝对贡献,以ωts,ωlb表示;
56、s43、将绝对贡献转化为相对贡献,公式如下:
57、
58、式中,表示趋势项或季节项对模型的相对贡献;表示趋势项或季节项对模型的绝对贡献;表示回顾时间窗中第k个时间点对模型的相对贡献;表示回顾时间窗中第k个时间点对模型的绝对贡献。
59、较现有技术相比,本发明具有以下优点:
60、1、本发明提供的一种解决在突发事件影响下的船舶排放时间序列预测方法,从研究角度来看,本发明就基于ais数据的船舶航行状态识别,船舶排放时间序列预测任务以及解决突发事件影响下的深度学习模型等三个方面进行算法改进、模型创新和案例研究,为航运业利益相关者开展船舶碳排放测算和预测提供理论支撑和应用示范。其他研究人员可以借鉴基于ais数据的船舶航行状态识别算法的思想开发出精度更高的航行状态辨识算法,或者开发具备其他功能的优化算法。另外,在进行船舶航速优化或配平优化等船舶减排的研究时,研究人员也能利用基于ais数据的船舶航行状态识别算法提高目标函数建模的精度,从而开发出更为有效的优化模型。
61、2、本发明提供的一种解决在突发事件影响下的船舶排放时间序列预测方法,在船舶排放估算的实践应用中,准确的船舶航行状态辨识提高了船舶排放估算的精度。首先,航运业相关部门可以利用基于船舶航行活动状态的排放估算模型以及基于ais数据的航行状态辨识算法对研究水域或全球的排放情况进行精确计算。从而为航运业相关部门提出具有季节性或时间差异性的排放控制政策提供一定的支持。除此之外,虽然本发明是以二氧化碳排放为研究案例的,但是本发明的研究框架以及提出的算法和模型均能应用到船舶排放pm,硫氧化物或氮氧化物的时间序列预测任务中。不同主体的船舶排放时间序列任务能为不同的利益相关者带来一定的益处。例如,港口海域的船舶pm排放时间序列预测任务,能提前向港口工作人员和居住在港口城市的公民提供pm信息,以帮助他们可以依据pm的预测结果采取相应的个人卫生防护和工作区域的健康保护措施。
62、3、本发明提供的一种解决在突发事件影响下的船舶排放时间序列预测方法,提出的关于突发事件影响的解决方案,也具有很高的实用价值。例如,本发明的模型可以在发生突发事件的初期(即数据概念漂移后的数据信息较少时),不需要重新训练模型便能做出较为准确的预测。该模型还能在新兴技术或政策提出的早期,准确预测航运模式的变化,从而对新兴技术或政策的效益做出定量评估。
63、基于上述理由本发明可在船舶排放时间序列预测研究等领域广泛推广。
本文地址:https://www.jishuxx.com/zhuanli/20240819/275185.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表