将受测试部件的测试数据与成品坐标系关联的方法及系统与流程
- 国知局
- 2024-08-22 14:15:45
本公开总体上涉及将用于受测试部件的测试数据与成品坐标系相关联,并且具体地涉及将用于来自测试环境中的坐标系的超声扫描数据的位置信息与该成品坐标系进行转换。公开了用于将测试数据与成品坐标系相关联的方法和系统的各种示例。例如,本文公开了所公开的方法和系统在用于飞行器的由复合材料构造的部件的无损检查(ndi)中的应用。还考虑了对各种其它类型的部件、其它类型的测试和其它类型的成品的应用。
背景技术:
1、对于当前的测试环境,与受测试部件的测试数据相关联的位置信息是基于测试环境中的原点和对应的测试坐标系。此外,对于特定测试数据,诸如超声扫描数据,由测试仪器捕获的位置信息可以仅是二维的(例如,x、y),而不管该部件是轮廓化的还是三维成形的。一种用于将测试数据转换为成品坐标系的技术使用基于二维测试数据的像素数据。然后将像素数据映射到部件的三维模型上。该技术不是有效的并且不是特别精确。
2、因此,本领域技术人员继续进行研究和开发努力,以将测试数据的转换从测试环境简化为设计环境和使用环境,从而改进各种产品生命周期管理过程。
技术实现思路
1、所公开的是用于将受测试部件的测试数据与成品坐标系相关联的方法和与其相关联的无损检查(ndi)系统的示例。还公开了在电子设计模型中整合受测试部件的测试数据的相邻集合的方法的示例。以下是可以要求保护或不要求保护的根据本公开的主题的示例的非穷举列表。
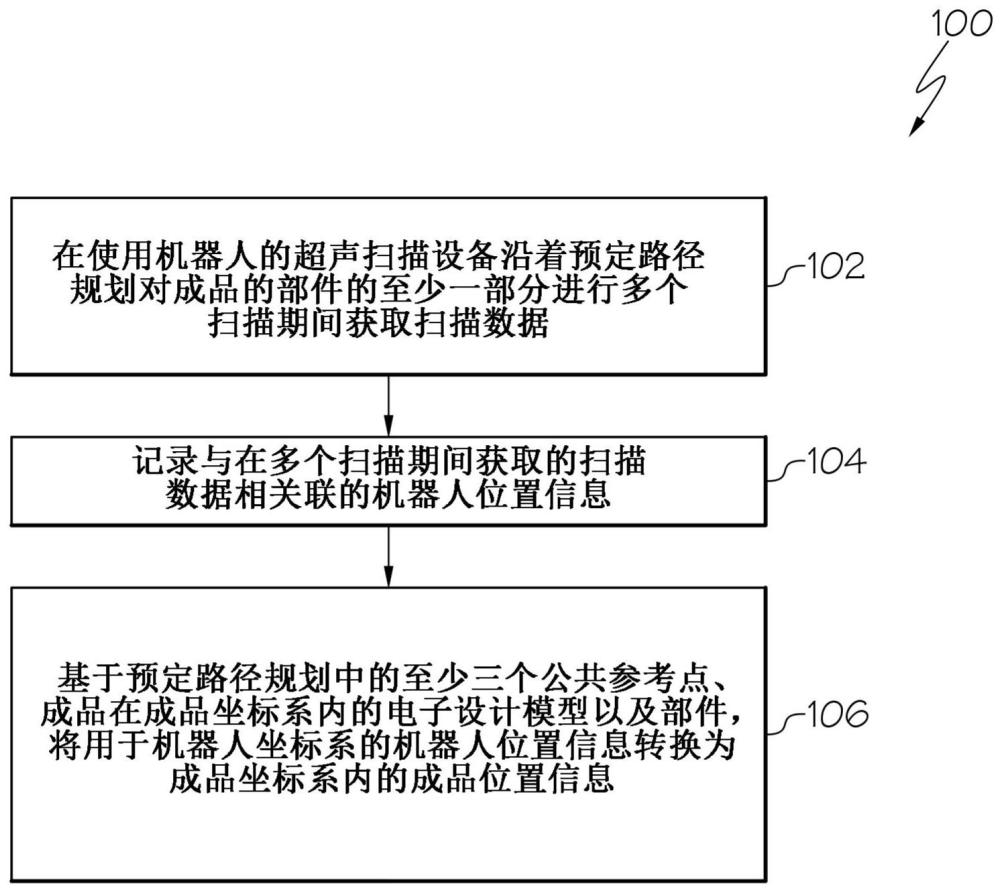
2、在一个示例中,所公开的用于将受测试部件的测试数据与成品坐标系相关联的方法包括:(1)在利用机器人的超声波扫描装置沿预定路径规划对成品的所述部分的至少一部分进行多个扫描期间,获取扫描数据,其中,所述超声波扫描装置由机器人计算系统控制;(2)记录与在所述多个扫描期间获取的所述扫描数据相关联的机器人位置信息,其中,所述机器人位置信息至少部分地基于与所述机器人相关联的机器人坐标系;以及(3)基于所述预定路径规划中的至少三个公共参考点、所述成品在所述成品坐标系内的电子设计模型以及所述部件,将所述机器人坐标系的所述机器人位置信息转换为所述成品坐标系内的成品位置信息。
3、在一个示例中,所公开的用于将受测试部件的测试数据与成品坐标系相关联的ndi系统包括机器人和机器人计算系统。机器人包括底座,具有固定到底座的近端和远端的机械臂、可移动地固定到机械臂的远端的凸缘以及固定到凸缘的超声扫描设备。机器人计算系统与机器人操作通信,并被配置为控制机械臂的移动和超声扫描设备的操作。机器人计算系统包括至少一个处理器和相关联的存储器以及存储至少一个应用程序和机器人数据的至少一个存储设备。机器人计算系统和机器人连同运行第一应用程序并访问第一机器人数据的至少一个处理器被配置为在使用超声扫描设备沿着预定路径规划对成品的该部分的至少一部分进行多个扫描期间获取扫描数据。机器人计算系统和机器人连同运行第二应用程序并访问第二机器人数据的至少一个处理器被配置为记录与在多个扫描期间获取的扫描数据相关联的机器人位置信息。机器人位置信息至少部分地基于与机器人相关联的机器人坐标系。机器人计算系统连同运行第三应用程序并访问第三机器人数据的至少一个处理器被配置为基于预定路径规划中的至少三个公共参考点、成品在成品坐标系内的电子设计模型以及部件,将机器人坐标系的机器人位置信息转换为成品坐标系内的成品位置信息。
4、在一个示例中,所公开的在一个电子设计模型中整合受测试部件的测试数据的相邻集合的方法包括:(1)使用第一机器人的第一超声扫描设备,在沿着预定第一路径规划对成品的所述部分的至少第一部分的第一多个扫描期间,获取第一扫描数据,其中,所述第一超声扫描设备由第一机器人计算系统控制;(2)记录与在所述第一多个扫描期间获取的所述第一扫描数据相关联的第一机器人位置信息,其中,所述第一机器人位置信息至少部分地基于与所述第一机器人相关联的第一机器人坐标系;(3)基于所述预定第一路径规划中的至少三个公共参考点、所述成品的电子设计模型以及所述部件,将所述第一机器人坐标系的所述第一机器人位置信息转换为成品坐标系内的第一成品位置信息;(4)使用第二机器人的第二超声扫描设备在沿预定第二路径规划对部件的至少第二部分进行第二多个扫描期间获取第二扫描数据,其中,第二超声扫描设备由第二机器人计算系统控制;(5)记录与在所述第二多个扫描期间获取的所述第二扫描数据相关联的第二机器人位置信息,其中,所述第二机器人位置信息至少部分地基于与所述第二机器人相关联的第二机器人坐标系;(6)基于预定第二路径规划中的至少三个公共参考点、成品的电子设计模型和部件,将第二机器人坐标系的第二机器人位置信息转换为成品坐标系内的第二成品位置信息;以及(7)处理所述第一成品位置信息和所述第二成品位置信息以标识所述第一扫描数据和所述第二扫描数据中的重叠扫描数据点。
5、根据以下详细描述,附图和所附权利要求,所公开的方法和系统的其他示例将变得显而易见。
技术特征:1.一种用于将受测试部件的测试数据与成品坐标系相关联的方法,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其中,所述电子设计模型包括三维计算机辅助设计模型。
3.根据权利要求1所述的方法,其中,所述扫描数据包括来自所述多个扫描中的每个扫描的波形数据。
4.根据权利要求1所述的方法,其中,所述多个扫描中的每个扫描包括对从所述超声扫描设备发射的声波的远离后壁的回波的测量。
5.根据权利要求1所述的方法,其中,所述预定路径规划包括用于由所述超声扫描设备遍历所述部件的连续路径。
6.根据权利要求1所述的方法,其中,所述机器人坐标系内的所述机器人位置信息用x、y、z坐标来表示,其中,x轴从与所述超声扫描设备的中心点相关联的原点沿水平平面延伸,y轴在所述水平平面中垂直于所述x轴的所述原点,并且z轴在竖直平面中垂直于所述x轴的所述原点。
7.根据权利要求1所述的方法,其中,所述成品坐标系内的所述成品位置信息被表示为x、y、z坐标,其中,x轴沿着水平平面从所述成品的中心前点处的原点延伸到中心后点,y轴在所述水平平面中垂直于所述x轴的所述原点,并且z轴在竖直平面中垂直于所述x轴的所述原点。
8.根据权利要求1所述的方法,其中,每个公共参考点包括所述部件内的确定装配件、所述部件内的导向孔、所述部件内的桁条以及与所述部件相关联的关键可见特征中的至少一者。
9.根据权利要求1所述的方法,所述方法还包括以下步骤:
10.一种用于将受测试部件的测试数据与成品坐标系相关联的无损检查ndi系统,所述ndi系统包括:
11.根据权利要求10所述的ndi系统,其中,所述机器人计算系统还包括:
12.根据权利要求10所述的ndi系统,其中,所述机器人计算系统连同运行第四应用程序并访问第四机器人数据的所述至少一个处理器被配置为基于所述机器人计算系统将所述机器人位置信息转换为所述成品位置信息,将来自所述多个扫描的所述扫描数据与所述成品坐标系内对应的成品位置信息链接,使得每个扫描数据与成品位置坐标相关联。
13.一种在电子设计模型中整合受测试部件的测试数据的相邻集合的方法,所述方法包括以下步骤:
14.根据权利要求13所述的方法,所述方法还包括以下步骤:
15.根据权利要求14所述的方法,所述方法还包括以下步骤:
技术总结本申请涉及将受测试部件的测试数据与成品坐标系关联的方法及系统。一种用于将受测试部件的测试数据与成品坐标系相关联的方法,包括:在使用机器人的超声扫描设备沿着预定路径规划对所述成品的部件的至少一部分进行多个扫描期间,获取扫描数据。记录与在多个扫描期间获取的扫描数据相关联的机器人位置信息。机器人位置信息基于机器人坐标系。基于预定路径规划中的至少三个公共参考点、成品在成品坐标系内的电子设计模型以及部件,将机器人位置信息转换成成品坐标系内的成品位置信息。还提供了一种用于将测试数据与成品坐标系相关联的无损检查(NDI)系统。技术研发人员:S·R·戈茨,B·A·费策尔受保护的技术使用者:波音公司技术研发日:技术公布日:2024/8/21本文地址:https://www.jishuxx.com/zhuanli/20240822/277729.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。