一种栅格地图构建方法、装置及智能移动设备与流程
- 国知局
- 2024-08-22 14:21:42
本技术涉及人工智能,特别是涉及一种栅格地图构建方法、装置及智能移动设备。
背景技术:
1、随着人工智能技术的不断发展,移动机器人等能够基于视觉自动进行导航定位的智能移动设备被广泛应用于各类场景中。例如,工厂中,利用巡检机器人进行巡检;家庭中,利用扫地机器人清扫地面等。
2、通常,智能移动设备能够被广泛应用于各类场景中的前提时,智能移动设备能够对所在场景进行环境数据采集以及地图构建,并且,确定自身相对于上述所构建的地图的位姿。
3、基于此,如何构建智能移动设备所进入的陌生场景的场景地图,对智能移动机器人的正常应用起到至关重要的作用。
技术实现思路
1、本技术实施例的目的在于提供一种栅格地图构建方法、装置及智能移动设备,以实现对智能移动设备所进入的陌生场景的场景地图的构建。具体技术方案如下:
2、第一方面,本技术实施例提供了一种栅格地图构建方法,所述方法包括:
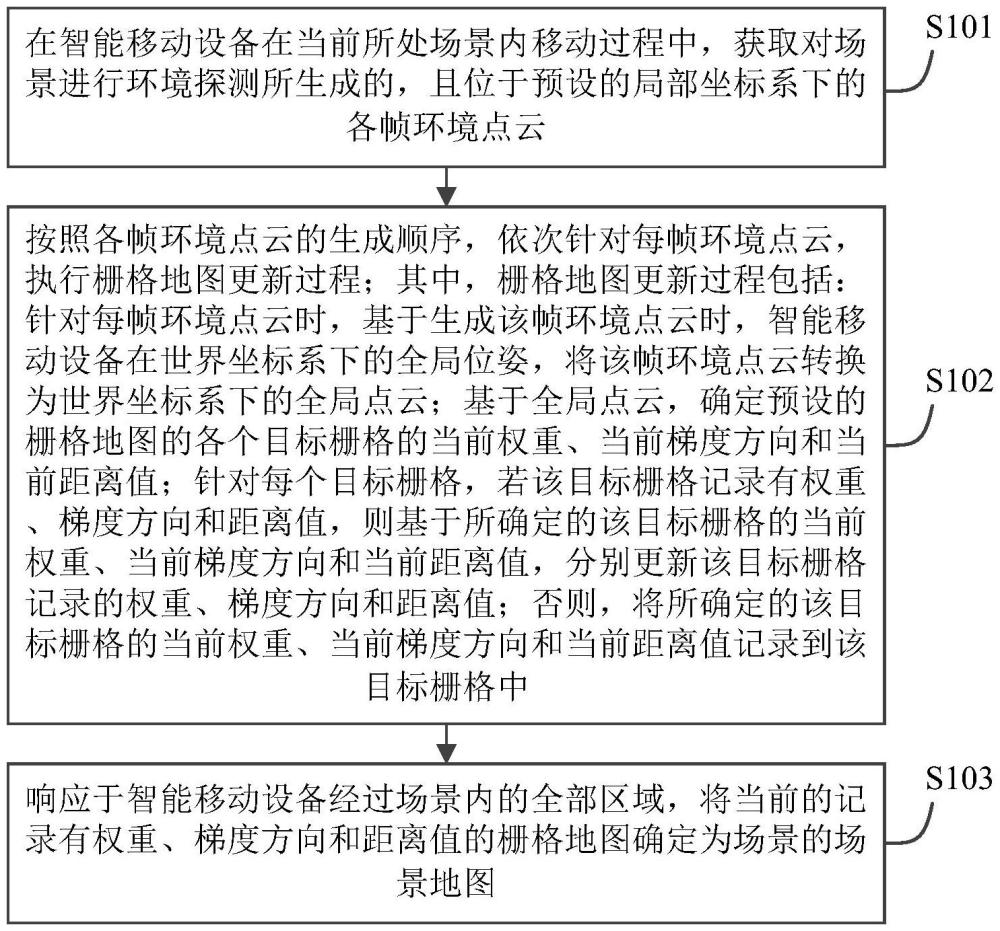
3、在智能移动设备在当前所处场景内移动过程中,获取对所述场景进行环境探测所生成的,且位于预设的局部坐标系下的各帧环境点云;其中,每帧环境点云至少包括:该帧环境点云的各个点的梯度方向和距离值;
4、按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行栅格地图更新过程;其中,所述栅格地图更新过程包括:针对每帧环境点云,基于生成该帧环境点云时,所述智能移动设备在世界坐标系下的全局位姿,将该帧环境点云转换为所述世界坐标系下的全局点云;基于所述全局点云,确定预设的栅格地图的各个目标栅格的当前权重、当前梯度方向和当前距离值;针对每个目标栅格,若该目标栅格记录有权重、梯度方向和距离值,则基于所确定的该目标栅格的当前权重、当前梯度方向和当前距离值,分别更新该目标栅格记录的权重、梯度方向和距离值;否则,将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值记录到该目标栅格中;所述各个目标栅格包括:全局点云的各个点在所述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格;
5、响应于所述智能移动设备经过所述场景内的全部区域,将当前的记录有权重、梯度方向和距离值的所述栅格地图确定为所述场景的场景地图。
6、可选的,一种具体实现方式中,所述在智能移动设备在当前所处场景内移动过程中,获取对所述场景进行环境探测所生成的,且位于预设的局部坐标系下的各帧环境点云,包括:
7、在智能移动设备在当前所处场景内移动过程中,获取所述智能移动设备所搭载图像采集设备所采集的各帧图像;
8、针对每帧图像,提取该帧图像的天花板区域的边缘特征,并将提取到的边缘特征转换为预设的局部坐标系下的局部点云,作为环境点云。
9、可选的,一种具体实现方式中,每帧环境点云还包括:该帧环境点云各个点的天花板语义信息,所述天花板语义信息用于表征该点在用于生成该帧环境点云的图像中的对应点是否属于天花板区域;所述栅格地图更新过程,还包括:
10、基于所述全局点云,确定各个目标栅格的当前天花板语义信息;
11、针对每个目标栅格,若该目标栅格记录有天花板语义信息,则基于所确定的该目标栅格的当前天花板语义信息,更新该目标栅格记录的当前天花板语义信息;否则,将所确定的该目标栅格的当前天花板语义信息,记录该目标栅格中。
12、可选的,一种具体实现方式中,所述基于所确定的该目标栅格的当前权重、当前梯度方向和当前距离值,分别更新该目标栅格记录的权重、梯度方向和距离值,包括:
13、将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值分别与该目标栅格记录的权重、梯度方向和距离值进行融合,并将融合后的权重、梯度方向和距离值记录到该目标栅格中。
14、可选的,一种具体实现方式中,所述将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值分别与该目标栅格记录的权重、梯度方向和距离值进行融合,包括:
15、分别利用第一公式、第二公式和第三公式,将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值分别与该目标栅格记录的权重、梯度方向和距离值进行融合;
16、其中,所述第一公式为:
17、wnm(p)=wnm+wnm
18、所述第二公式为:
19、
20、所述第三公式为:
21、
22、其中,wnm为针对第n帧环境点云,所确定的第m个目标栅格的当前权重,wnm为所述第m个目标栅格中记录的权重,wnm(p)为对所述第m个目标栅格的当前权重和记录的权重进行融合所得到的新的权重;nfnm为所述第m个目标栅格的当前梯度方向,dfnm为所述第m个目标栅格记录的梯度方向,nfnm(p)为对所述第m个目标栅格的当前梯度方向和记录的梯度方向进行融合所得到的新的梯度方向;dfnm为所述第m个目标栅格的当前距离值,dfnm为所述第m个目标栅格记录的距离值,dfnm(p)为对所述第m个目标栅格的当前距离值和记录的距离值进行融合所得到的新的距离值。
23、可选的,一种具体实现方式中,所述基于所述全局点云,确定预设的栅格地图的各个目标栅格的当前权重,包括:
24、基于预设的点云误差模型,确定所述全局点云的各个点的权重,并基于所述全局点云的各个点的权重,确定各个目标栅格的当前权重。
25、第二方面,本技术实施例提供了一种智能移动设备,包括:探测传感器和处理器;
26、所述探测传感器,用于在所述智能移动设备在当前所处场景内移动过程中,对所述场景进行环境探测,生成位于预设的局部坐标系下的各帧环境点云;
27、所述处理器,用于基于所述各帧环境点云,执行上述第一方面任一所述的栅格地图构建方法。
28、第三方面,本技术实施例提供了一种栅格地图构建装置,该装置包括:
29、点云获取模块,用于在智能移动设备在当前所处场景内移动过程中,获取对所述场景进行环境探测所生成的,且位于预设的局部坐标系下的各帧环境点云;其中,每帧环境点云至少包括:该帧环境点云的各个点的梯度方向和距离值;
30、地图更新模块,用于按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行栅格地图更新过程;其中,所述栅格地图更新过程包括:针对每帧环境点云,基于生成该帧环境点云时,所述智能移动设备在世界坐标系下的全局位姿,将该帧环境点云转换为所述世界坐标系下的全局点云;基于所述全局点云,确定预设的栅格地图的各个目标栅格的当前权重、当前梯度方向和当前距离值;针对每个目标栅格,若该目标栅格记录有权重、梯度方向和距离值,则基于所确定的该目标栅格的当前权重、当前梯度方向和当前距离值,分别更新该目标栅格记录的权重、梯度方向和距离值;否则,将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值记录到该目标栅格中;所述各个目标栅格包括:全局点云的各个点在所述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格;
31、地图获取模块,用于响应于所述智能移动设备经过所述场景内的全部区域,将当前的记录有权重、梯度方向和距离值的所述栅格地图确定为所述场景的场景地图。
32、可选的,一种具体实现方式中,所述点云获取模块,具体用于:
33、在智能移动设备在当前所处场景内移动过程中,获取所述智能移动设备所搭载图像采集设备所采集的各帧图像;
34、针对每帧图像,提取该帧图像的天花板区域的边缘特征,并将提取到的边缘特征转换为预设的局部坐标系下的局部点云,作为环境点云。
35、可选的,一种具体实现方式中,每帧环境点云还包括:该帧环境点云各个点的天花板语义信息,所述天花板语义信息用于表征该点在用于生成该帧环境点云的图像中的对应点是否属于天花板区域;所述地图更新模块,还用于:
36、基于所述全局点云,确定各个目标栅格的当前天花板语义信息;
37、针对每个目标栅格,若该目标栅格记录有天花板语义信息,则基于所确定的该目标栅格的当前天花板语义信息,更新该目标栅格记录的当前天花板语义信息;否则,将所确定的该目标栅格的当前天花板语义信息,记录该目标栅格中。
38、可选的,一种具体实现方式中,所述地图更新模块,包括:
39、地图更新子模块,用于将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值分别与该目标栅格记录的权重、梯度方向和距离值进行融合,并将融合后的权重、梯度方向和距离值记录到该目标栅格中。
40、可选的,一种具体实现方式中,所述地图更新子模块,具体用于:
41、分别利用第一公式、第二公式和第三公式,将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值分别与该目标栅格记录的权重、梯度方向和距离值进行融合;
42、其中,所述第一公式为:
43、wnm(p)=wm+wnm
44、所述第二公式为:
45、
46、所述第三公式为:
47、
48、其中,wnm为针对第n帧环境点云,所确定的第m个目标栅格的当前权重,wnm为所述第m个目标栅格中记录的权重,wnm(p)为对所述第m个目标栅格的当前权重和记录的权重进行融合所得到的新的权重;nfnm为所述第m个目标栅格的当前梯度方向,dfnm为所述第m个目标栅格记录的梯度方向,nfnm(p)为对所述第m个目标栅格的当前梯度方向和记录的梯度方向进行融合所得到的新的梯度方向;dfnm为所述第m个目标栅格的当前距离值,dfnm为所述第m个目标栅格记录的距离值,dfnm(p)为对所述第m个目标栅格的当前距离值和记录的距离值进行融合所得到的新的距离值。
49、可选的,一种具体实现方式中,所述地图更新模块,具体用于:
50、基于预设的点云误差模型,确定所述全局点云的各个点的权重,并基于所述全局点云的各个点的权重,确定各个目标栅格的当前权重。
51、第四方面,本技术实施例提供了一种电子设备,包括:
52、存储器,用于存放计算机程序;
53、处理器,用于执行存储器上所存放的程序时,实现上述第一方面任一所述的栅格地图构建方法。
54、第五方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一所述的栅格地图构建方法。
55、第六方面,本技术实施例提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述第一方面任一所述的栅格地图构建方法。
56、本技术实施例有益效果:
57、以上可见,应用本技术实施例提供的方案,为了构建智能移动设备所进入的陌生场景的场景地图,智能移动设备通常搭载有各类探测传感器,例如,激光雷达、图像采集设备等。而在智能移动设备进入该场景后,智能移动设备可以在该场景中移动,在移动过程中,可以基于智能移动设备所搭载的探测传感器对该场景进行环境探测,生成位于预设的局部坐标系下的各帧环境点云,并利用上述各帧环境点云进行该场景的场景地图构建。这样,在构建智能移动设备当前所处场景的场景地图时,可以首先在智能移动设备在该场景内移动过程中,获取对该场景进行环境探测所生成的,且位于上述局部坐标系下的各帧环境点云。进而,便可以按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行栅格地图更新过程,即按照各帧环境点云的生成顺序,依次利用各帧环境点云,对预设的栅格地图的各个栅格记录的权重、梯度方向和距离值进行更新。其中,对于每帧环境点云而言,上述栅格地图更新过程包括:首先基于生成该帧环境点云时,所述智能移动设备在世界坐标系下的全局位姿,将该帧环境点云转换为所述世界坐标系下的全局点云。之后,将全局点云的各个点在上述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格均确定为目标栅格。然后,基于上述全局点云,确定预设的栅格地图的各个目标栅格的当前权重、当前梯度方向和当前距离值。进而,针对每个目标栅格,若该目标栅格记录有权重、梯度方向和距离值,则基于所确定的该目标栅格的当前权重、当前梯度方向和当前距离值,分别更新该目标栅格记录的权重、梯度方向和距离值;若该目标栅格未记录有权重、梯度方向和距离值,则将所确定的该目标栅格的当前权重、当前梯度方向和当前距离值记录到该目标栅格中。在针对每帧环境点云,执行完上述栅格地图更新过程时,可以认为完成该帧环境点云对上述栅格地图的更新。最后,响应于智能移动设备移动经过上述场景内的全部区域,将当前的记录有权重、梯度方向和距离值的栅格地图,确定为该场景的场景地图。
58、基于此,应用本技术实施例提供的方案,利用智能移动设备对当前所处场景进行环境探测所生成的位于上述局部坐标系下的各帧环境点云,实现对预设的栅格地图中各个栅格所记录的权重、梯度方向和距离值的逐步更新,完成对该场景的场景地图的构建。并且,该场景地图还可以为后续智能移动设备在该场景中的定位、导航以及执行各类任务等提供基础。并且,上述场景地图中记录有权重、梯度方向和距离值等多维信息,更有利于后续基于该场景地图的定位,可以提升定位算法的鲁棒性和精度。
59、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278324.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表