一种用于电网识别的图像处理方法及系统与流程
- 国知局
- 2024-08-22 14:53:01
本技术涉及电网,特别涉及一种用于电网识别的图像处理方法及系统。
背景技术:
1、近年来,随着计算机视觉和人工智能技术的快速发展,利用图像处理和模式识别方法实现电网设备的自动巡检和状态诊断受到广泛关注。通过采集电网设备的图像数据,运用图像处理算法对其进行分析和识别,可以自动检测设备缺陷,评估设备健康状态,为电网运维提供决策支持。
2、然而,由于电网环境复杂多变,设备种类繁多,图像质量参差不齐,现有的电网图像识别技术普遍存在识别精度不高的问题。传统的图像识别方法主要采用特征提取和分类器设计,对图像数据的质量和算法的泛化能力要求较高,在实际应用中容易受到光照、角度、遮挡等因素的影响,导致识别精度下降。
3、在相关技术中,比如中国专利文献cn114155189a中提供了一种基于ncc图像匹配算法的配电网缺陷图片快速分析方法,涉及配电网技术领域,通过对标准配电网图像进行分类构建识别数据库;采用图像识别算法识别实时配电网图形中的待分析设备并标准,根据识别出的待分析设备获取相应的标准配电网图像;采用ncc图像匹配算法对标记后的实时配电网图像和相应的标准配电网图像进行匹配,当输出的ncc图像出现标记时,则实时配电网图像为配电网缺陷图像,实时配电网图像中的待分析设备为缺陷设备,反之实时配电网图像中的设备为正常设备。但是该方案中,ncc算法对图像的几何变换(如平移、旋转、缩放等)和光照变化较为敏感,当实时配电网图像与标准图像存在这些变化时,ncc算法的匹配精度会显著下降。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的电网图像识别精度低的问题,本技术提供了一种用于电网识别的图像处理方法及系统,通过计算待检测图像与标准图像之间的相似度,判断待检测图像是否存在缺陷等,提高了设备识别精度。
3、2.技术方案
4、本技术的目的通过以下技术方案实现。
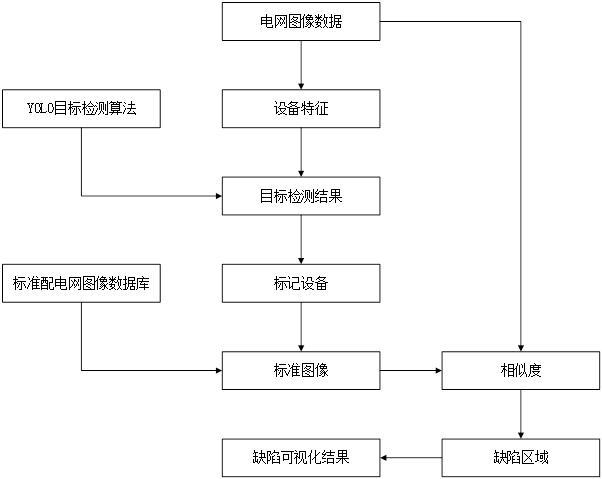
5、本说明书的一个方面提供一种用于电网识别的图像处理方法,首先,采集电网图像数据,将采集的图像数据输入到图像预处理模块,对图像数据进行预处理,得到预处理后的图像数据。然后,将预处理后的图像数据输入到特征提取模块,根据预处理后的图像数据,提取图像数据中的设备特征,得到提取的设备特征。接着,将提取的设备特征输入到目标检测模块,采用yolo目标检测算法对预处理后的图像数据进行目标检测,得到目标检测结果,目标检测结果包含检测出的设备。随后,将目标检测结果输入到设备标记模块,对检测出的设备进行标记,得到标记的设备。根据标记的设备,从标准配电网图像数据库中选择对应的标准图像,将预处理后的图像数据作为待检测图像。接下来,将待检测图像和选择的标准图像输入到相似度计算模块,计算待检测图像与标准图像之间的相似度,得到相似度计算结果。然后,将相似度计算结果输入到缺陷判断模块,根据相似度计算结果,判断待检测图像是否存在缺陷,得到判断结果。如果判断结果为待检测图像存在缺陷,将待检测图像输入到缺陷区域获取模块,获取缺陷区域。最后,将获取的缺陷区域和采集的电网图像数据输入到缺陷可视化模块,将获取的缺陷区域标记在采集的电网图像数据上,生成缺陷可视化结果。
6、进一步的,对于根据预处理后的图像数据提取图像数据中的设备特征,首先,将预处理后的图像数据划分为多个数据块,得到多个数据块。然后,对每个数据块进行多尺度梯度计算,具体包括:对每个数据块,选择不同的尺度参数,如1、2、4等,对数据块进行下采样,得到不同尺度下的数据块;对每个尺度下的数据块,分别计算水平方向和垂直方向的梯度,可以使用sobel算子、prewitt算子或scharr算子等进行梯度计算;根据水平方向和垂直方向的梯度,计算每个像素点的梯度幅值和梯度方向,梯度幅值可以用水平方向和垂直方向梯度的平方和的开方计算,梯度方向可以用反正切函数计算;将每个尺度下的梯度幅值和梯度方向作为该尺度下数据块的梯度特征。通过多尺度梯度计算,得到每个数据块在不同尺度下的梯度方向和梯度幅值。对每个数据块在不同尺度下的梯度方向和梯度幅值进行处理:对每个数据块在不同尺度下的梯度方向进行加权量化,将0到360度的角度范围划分为多个区间,如8个区间,对每个梯度方向进行量化,将其归为最近的区间,得到量化后的梯度方向;对每个量化后的梯度方向,根据其对应的梯度幅值进行加权,将同一区间内的梯度幅值累加,得到该区间的加权梯度幅值;将不同区间的加权梯度幅值组成一个直方图,作为该尺度下数据块的加权梯度方向直方图。通过加权量化,得到每个数据块在不同尺度下的加权梯度方向直方图。然后,将每个数据块在不同尺度下的加权梯度方向直方图进行串联,得到每个数据块的多尺度方向直方图,即将不同尺度下的直方图首尾相连,组成一个长向量。最后,将所有数据块的多尺度方向直方图组合成一个特征向量,作为预处理后的图像数据中的设备特征。具体可以将所有数据块的多尺度方向直方图按照一定顺序排列,如按照数据块的位置从左到右、从上到下排列,组成一个大的特征向量。多尺度梯度计算和加权量化可以有效捕捉图像在不同尺度下的方向和幅值信息,提高特征的表示能力和鲁棒性。将不同数据块的特征组合成一个特征向量,可以全面描述图像数据中的设备特征,为后续的目标检测和缺陷判断提供丰富的特征信息。
7、进一步的,对于对每个数据块在不同尺度下的梯度方向进行加权量化,首先,计算每个数据块在不同尺度下的梯度方向的权重,具体包括:对于第i个数据块在第j个尺度下的梯度方向,计算其与主方向之间的夹角余弦值cos(i,j),主方向可以是预定义的方向,如水平方向或垂直方向,也可以是根据数据块的梯度方向分布计算得到的主方向;根据梯度幅值m(i,j)和夹角余弦值cos(i,j),计算梯度方向的权重值w(i,j),采用的计算公式为:其中,e是自然常数。通过该公式,梯度幅值越大、夹角余弦值越接近1(即梯度方向与主方向越接近),权重值越大,表示该梯度方向对数据块特征的贡献越大。通过权重计算,得到每个数据块在不同尺度下的每个梯度方向的权重值。然后,根据权重值对每个数据块在不同尺度下的梯度方向进行加权量化,具体包括:对于第i个数据块在第j个尺度下的梯度方向o(i,j),根据其数值将其量化到直方图的对应bin中,量化方法可以是均匀量化或非均匀量化,采用均匀量化,将360度的角度范围划分为k个bin,每个bin的区间为360/k度,则梯度方向o(i,j)在第k个bin上的量化值q(o(i,j),k)为1,其他bin上的量化值为0;根据梯度方向的权重值w(i,j)和量化值q(o(i,j),k),计算加权量化值h(i,j,k),采用的计算公式为:h(i,j,k)=w(i,j)×q(o(i,j),k),表示第i个数据块在第j个尺度下的第k个加权梯度方向直方图bin的值,即将梯度方向的权重值加到对应的bin上。通过加权量化,得到每个数据块在不同尺度下的加权梯度方向直方图,直方图的每个bin表示对应区间内的加权梯度方向累加值。最后,将每个数据块在不同尺度下的加权梯度方向直方图作为该数据块的特征描述,可以将不同尺度下的直方图串联成一个长向量,也可以将不同尺度下的直方图作为多个并行的特征通道。对每个数据块在不同尺度下的梯度方向进行加权量化的完整数据处理流程。梯度方向权重的计算考虑了梯度幅值和方向与主方向的夹角,能够反映不同梯度方向对数据块特征的重要程度。加权量化将梯度方向的权重值累加到对应的直方图bin中,得到的加权梯度方向直方图能够综合描述数据块的梯度方向分布特征,增强了特征的表示能力和鲁棒性。
8、进一步的,对于计算待检测图像与标准图像之间的相似度,首先,将待检测图像和标准图像划分为多个子块,具体包括:根据预定义的子块大小,如8x8或16x16,将待检测图像和标准图像分别划分为多个非重叠的子块;对每个子块进行加权计算,可以根据子块在图像中的位置、子块的视觉显著性等因素确定加权系数,加权系数的选取可以根据经验或实验结果进行调整。通过划分和加权,得到待检测图像和标准图像的多个加权子块。然后,对每个子块,计算加权后的待检测图像子块和对应的加权后的标准图像子块之间的亮度相似度、对比度相似度和结构相似度,具体包括:对于第i个子块,提取加权后的待检测图像子块和对应的加权后的标准图像子块;计算两个子块的均值亮度,得到亮度相似度,亮度相似度可以用两个子块的均值亮度之差的绝对值表示,值越小表示亮度越相似;计算两个子块的对比度,得到对比度相似度,对比度相似度可以用两个子块的标准差之比表示,值越接近1表示对比度越相似;计算两个子块的结构相似性,得到结构相似度,结构相似度可以用两个子块的归一化互相关系数表示,值越接近1表示结构越相似。通过计算,得到每个子块的亮度相似度、对比度相似度和结构相似度。
9、接着,根据每个子块的亮度相似度、对比度相似度和结构相似度,计算每个子块的局部相似度r(xi,yi),具体包括:对于第i个子块,根据其亮度相似度、对比度相似度和结构相似度,计算局部相似度r(xi,yi),可以采用:
10、r(xi,yi)=λ×l(x,y)α+(1-λ)×{c(x,y)β×s(x,y)γ},其中,l(x,y)表示加权后的待检测图像子块和加权后的标准图像子块之间的亮度相似度,c(x,y)表示加权后的待检测图像子块和加权后的标准图像子块之间的对比度相似度,s(x,y)表示加权后的待检测图像子块和加权后的标准图像子块之间的结构相似度;α,β,γ分别表示亮度相似度、对比度相似度和结构相似度的权重系数;λ表示系数。
11、最后,采用加权平均方法,将所有子块的局部相似度r(xi,yi)融合,得到待检测图像与标准图像之间的全局相似度r(x,y),具体包括:根据每个子块的加权系数wi和局部相似度r(xi,yi),计算全局相似度r(x,y),采用的计算公式为:其中,∏表示连乘符号,将每个子块的局部相似度r(xi,yi)按照加权系数wi进行幂运算,然后将所有子块的结果连乘得到全局相似度r(x,y)。通过加权平均,得到待检测图像与标准图像之间的全局相似度r(x,y),全局相似度综合考虑了所有子块的局部相似度,能够更全面地评估两个图像之间的相似程度。子块划分和加权可以针对性地评估图像的局部特征,亮度、对比度和结构相似度的计算从多个角度评估子块的相似性。加权平均融合局部相似度得到全局相似度,能够综合考虑图像的整体相似性,提高相似度计算的准确性和鲁棒性。
12、进一步的,对于亮度相似度的计算,首先,对于加权后的待检测图像子块和加权后的标准图像子块,计算它们的加权均值,具体包括:对于待检测图像子块,提取其中的像素灰度值x_i和对应的加权系数wi,计算加权均值μx,采用的计算公式为:将每个像素的灰度值xi乘以其对应的加权系数wi,然后将所有乘积求和,再除以加权系数之和σwi,得到加权均值μx。对于标准图像子块,同样提取其中的像素灰度值y_i和对应的加权系数wi,计算加权均值μy,采用的计算公式为:计算过程与待检测图像子块的加权均值计算相同。通过计算,得到待检测图像子块的加权均值μx和标准图像子块的加权均值μy。然后,计算常数c1,具体包括:根据图像的位数,确定图像的动态范围l,对于不同位数的灰度图像,l的取值如下:8位灰度图像:l=255,10位灰度图像:l=1023,12位灰度图像:l=4095,16位灰度图像:l=65535。选择小常数k_1,取值范围为0.01到0.05,可以根据实际需求进行调整。
13、根据图像的动态范围l和小常数k1,计算常数c1,采用的计算公式为:
14、c1=(k1×l)2,即将小常数k1乘以图像的动态范围l,然后进行平方运算,得到常数c1。通过计算,得到常数c1的值。最后,根据加权均值μx、μy和常数c1,计算亮度相似度l(x,y),采用的计算公式为:将加权均值μx和μy的乘积乘以2,再加上常数c1,作为分子;将加权均值μ_x和μ_y分别进行平方运算,然后相加,再加上常数c1,作为分母;最后将分子除以分母,得到亮度相似度l(x,y)。其中,加权均值的计算考虑了图像子块中每个像素的灰度值和对应的加权系数,能够更准确地表示子块的亮度信息。常数c1的引入可以避免分母为零的情况,提高计算的稳定性。亮度相似度的计算公式综合考虑了加权均值和常数c1,能够有效评估两个子块之间的亮度相似程度,值越接近1表示亮度越相似。
15、进一步的,对于对比度相似度的计算,首先,对于加权后的待检测图像子块和加权后的标准图像子块,计算它们的加权标准差,具体包括:对于待检测图像子块,提取其中的像素灰度值xi、对应的加权系数wi以及加权均值μx,计算加权标准差σx,采用的计算公式为:将每个像素的灰度值xi减去加权均值μx,然后进行平方运算,再乘以对应的加权系数wi,将所有乘积求和,除以加权系数之和σwi,最后对结果进行平方根运算,得到加权标准差σx。对于标准图像子块,同样提取其中的像素灰度值yi、对应的加权系数wi以及加权均值μy,计算加权标准差σy,采用的计算公式为:计算过程与待检测图像子块的加权标准差计算相同。通过计算,得到待检测图像子块的加权标准差σ_x和标准图像子块的加权标准差σy。
16、然后,计算常数c2,其取值与常数c1相等,即:c2=c1=(k1×l)2,其中,k1为小常数,取值范围为0.01到0.05;l为图像的动态范围,对于不同位数的灰度图像,l的取值如下:8位灰度图像:l=255,10位灰度图像:l=1023,12位灰度图像:l=4095,16位灰度图像:l=65535。通过计算,得到常数c2的值。最后,根据加权标准差σx、σy和常数c2,计算对比度相似度c(x,y),采用的计算公式为:
17、将加权标准差σx和σy的乘积乘以2,再加上常数c2,作为分子;将加权标准差σx和σy分别进行平方运算,然后相加,再加上常数c2,作为分母;最后将分子除以分母,得到对比度相似度c(x,y)。其中,加权标准差的计算考虑了图像子块中每个像素与加权均值的差异以及对应的加权系数,能够有效表示子块的对比度信息。常数c2的引入可以避免分母为零的情况,提高计算的稳定性。对比度相似度的计算公式综合考虑了加权标准差和常数c2,能够有效评估两个子块之间的对比度相似程度,值越接近1表示对比度越相似。
18、进一步的,对于结构相似度的计算,首先,对于加权后的待检测图像子块和加权后的标准图像子块,计算它们的加权协方差,具体包括:对于待检测图像子块和标准图像子块,提取其中的像素灰度值xi和yi,对应的加权系数wi,以及加权均值μx和μy,计算加权协方差σxy,采用的计算公式为:将待检测图像子块中每个像素的灰度值xi减去加权均值μx,标准图像子块中每个像素的灰度值yi减去加权均值μy,然后将两个差值相乘,再乘以对应的加权系数w_i,将所有乘积求和,除以加权系数之和σwi,得到加权协方差σxy。通过计算,得到待检测图像子块和标准图像子块的加权协方差σxy。
19、然后,对于加权后的待检测图像子块和加权后的标准图像子块,计算它们的加权标准差σ_x和σ_y,计算过程与对比度相似度中的加权标准差计算相同,即:通过计算,得到待检测图像子块的加权标准差σx和标准图像子块的加权标准差σy。接着,计算常数c3,其计算公式为:c3=c2/2,其中,c2为对比度相似度计算中的常数,c2=c1=(k1×l)2,k1为小常数,取值范围为0.01到0.05;l为图像的动态范围,对于不同位数的灰度图像,l的取值如下:8位灰度图像:l=255,10位灰度图像:l=1023,12位灰度图像:l=4095,16位灰度图像:l=65535。通过计算,得到常数c3的值。最后,根据加权协方差σxy、加权标准差σx和σy和常数c3,计算结构相似度s(x,y),采用的计算公式为:其中,×表示乘法运算,即将加权协方差σxy加上常数c3,作为分子;将加权标准差σx和σy相乘,再加上常数c3,作为分母;最后将分子除以分母,得到结构相似度s(x,y)。加权协方差的计算考虑了待检测图像子块和标准图像子块中每个像素与各自加权均值的差异以及对应的加权系数,能够有效表示两个子块的结构相关性。加权标准差的计算表示了子块内部像素值的分散程度。常数c3的引入可以避免分母为零的情况,提高计算的稳定性。结构相似度的计算公式综合考虑了加权协方差、加权标准差和常数c3,能够有效评估两个子块之间的结构相似程度,值越接近1表示结构越相似。
20、进一步的,对于局部相似度值的计算,首先,对于每个子块,已经计算得到了加权后的待检测图像子块和加权后的标准图像子块之间的亮度相似度l(x,y)、对比度相似度c(x,y)和结构相似度s(x,y)。然后,确定亮度相似度、对比度相似度和结构相似度的权重系数α,β,γ以及系数λ,具体包括:根据实际需求和经验,设定亮度相似度的权重系数α、对比度相似度的权重系数β和结构相似度的权重系数γ,这些权重系数用于调整不同相似度指标在计算局部相似度值时的重要性。权重系数的取值范围通常在0到1之间,且满足α+β+γ=1。同样根据实际需求和经验,设定系数λ,用于平衡亮度相似度和对比度相似度与结构相似度的组合。λ的取值范围通常在0到1之间。通过设定,确定了权重系数α、β、γ和系数λ的值。
21、最后,根据亮度相似度l(x,y)、对比度相似度c(x,y)、结构相似度s(x,y)以及权重系数α、β、γ和系数λ,计算每个子块的局部相似度值r(xi,yi),采用的计算公式为:r(xi,yi)=λ×l(x,y)α+(1-λ)×{c(x,y)β×s(x,y)γ},计算过程如下:将亮度相似度l(x,y)进行α次幂运算,得到l(x,y)α。将对比度相似度c(x,y)进行β次幂运算,得到c(x,y)β。将结构相似度s(x,y)进行γ次幂运算,得到s(x,y)γ。局部相似度值的计算综合考虑了亮度相似度、对比度相似度和结构相似度,通过设定权重系数和系数,可以灵活调整不同相似度指标的重要性和组合方式。局部相似度值越接近1,表示待检测图像子块和标准图像子块的局部相似度越高。通过计算每个子块的局部相似度值,可以全面评估待检测图像和标准图像在不同局部区域的相似程度,为后续的全局相似度计算提供了重要的局部相似性信息。
22、进一步的,获取缺陷区域,将待检测图像转换为二值图像:对待检测图像进行阈值处理,将灰度值大于等于阈值的像素设置为1,表示缺陷区域;将灰度值小于阈值的像素设置为0,表示非缺陷区域。得到二值图像,其中缺陷区域的像素值为1,其他区域的像素值为0。将二值图像分割为前景区域和背景区域:使用图像分割算法,如区域生长算法或分水岭算法,将二值图像分割为前景区域和背景区域。前景区域对应缺陷区域,像素值为1;背景区域对应非缺陷区域,像素值为0。对分割后的前景区域进行连通域分析:使用连通域标记算法,如四连通或八连通算法,对前景区域进行标记。将连通的前景像素标记为同一个连通域,不同的连通域使用不同的标签值。得到初始缺陷区域,每个连通域表示一个初始缺陷区域。对初始缺陷区域进行形态学处理:对初始缺陷区域进行腐蚀操作,使用预定义的结构元素对初始缺陷区域进行腐蚀,去除面积小于阈值的噪声区域。对腐蚀后的缺陷区域进行膨胀操作,使用预定义的结构元素对缺陷区域进行膨胀,填充缺陷区域中的孔洞。得到形态学处理后的缺陷区域,去除了噪声区域,填充了孔洞区域。对形态学处理后的缺陷区域进行轮廓提取:使用轮廓提取算法,如canny边缘检测算法或sobel算子,对形态学处理后的缺陷区域进行轮廓提取。得到缺陷区域的轮廓,轮廓是由连续的边缘像素组成的闭合曲线。对缺陷区域的轮廓进行几何特征计算:计算缺陷区域轮廓的凸包面积,使用凸包算法,如graham扫描算法或jarvis步进算法,计算轮廓的最小凸多边形的面积。计算缺陷区域轮廓的中心位置,使用几何中心计算公式,计算轮廓内部像素的平均坐标值,得到缺陷区域的几何中心在图像中的坐标位置。将缺陷区域的轮廓作为最终的缺陷区域:将得到的缺陷区域轮廓作为最终的缺陷区域,用于后续的缺陷分析和可视化显示。
23、优选地,获取初始缺陷,在连通域分析之前,对二值图像进行形态学处理,如开运算或闭运算,去除小的噪声区域,填充小的孔洞区域。使用更高级的连通域标记算法,如基于图论的连通域标记算法,提高连通域标记的准确性和效率。优选的,几何特征计算,除了计算凸包面积和中心位置,还可以计算其他几何特征,如周长、面积、长宽比、圆形度等,丰富缺陷区域的特征描述。使用更高级的几何特征计算算法,如基于矩的几何特征计算算法,提高几何特征计算的精度和鲁棒性。
24、本说明书的另一个方面还提供一种用于电网识别的图像处理系统,包括:图像预处理模块:对输入的电网图像进行图像质量评估,判断图像是否满足后续处理的要求,如分辨率、对比度、噪声等。对图像进行噪声去除,使用中值滤波、高斯滤波等算法去除图像中的噪声和干扰。对图像进行增强处理,如直方图均衡化、对比度调整等,提高图像的视觉质量和特征的可区分性。图像分割模块:使用边缘检测算法,如canny算子或sobel算子,提取图像中的边缘信息。基于边缘信息,使用区域生长算法或分水岭算法,将图像分割为不同的区域,每个区域对应一个电网设备或线路段。对分割结果进行后处理,如形态学操作、小区域过滤等,去除分割错误和噪声区域。特征提取模块:对分割后的区域进行特征提取,提取颜色、纹理、形状等特征。颜色特征:提取区域的颜色直方图、颜色矩等,描述区域的颜色分布和统计信息。纹理特征:提取区域的灰度共生矩阵、gabor滤波器响应等,描述区域的纹理模式和结构信息。形状特征:提取区域的几何特征,如面积、周长、长宽比、圆形度等,描述区域的形状特征。特征选择和维度缩减模块:对提取的特征进行特征选择,选择对电网设备和线路识别贡献较大的特征子集。使用特征选择算法,如relief算法、信息增益算法等,评估特征的重要性和区分能力。对选择后的特征进行维度缩减,使用主成分分析(pca)或线性判别分析(lda)等算法,降低特征的维度,提高后续分类的效率。分类器训练和识别模块:使用机器学习算法,如支持向量机(svm)、随机森林、卷积神经网络(cnn)等,训练电网设备和线路的分类器。将特征选择和维度缩减后的特征向量作为输入,将对应的电网设备和线路类别作为输出,训练分类器模型。对新的输入图像,提取特征并使用训练好的分类器进行预测,识别图像中的电网设备和线路。后处理和可视化模块:对分类器的识别结果进行后处理,如结果过滤、空间关系分析等,提高识别的准确性和一致性。将识别结果可视化,在原始图像上标注识别出的电网设备和线路,生成直观的识别结果图。计算识别结果的评价指标,如准确率、召回率、f1分数等,评估系统的性能和可靠性。数据管理和更新模块:建立电网图像数据库,存储和管理用于训练和测试的电网图像数据。定期更新和扩充数据库,增加不同场景、不同条件下的电网图像,提高系统的泛化能力。对系统进行迭代优化和更新,根据新的数据和反馈不断改进算法和模型,提升识别的性能和鲁棒性。
25、3.有益效果
26、相比于现有技术,本技术的优点在于:
27、通过对采集的电网图像数据进行预处理,提取图像数据中的设备特征,采用yolo目标检测算法进行目标检测,可以快速、准确地识别出电网图像中的设备,提高电网图像识别效率和精度。
28、通过将预处理后的图像数据划分为多个数据块,对每个数据块进行多尺度梯度计算,对梯度方向进行加权量化,得到多尺度方向直方图作为设备特征,可以有效提取图像中的设备特征,增强特征表示能力,提高设备识别的精度。
29、通过计算待检测图像与标准图像之间的相似度,根据相似度计算结果判断待检测图像是否存在缺陷,可以自动化、智能化地检测电网图像中的设备缺陷。
30、通过将待检测图像和标准图像划分为多个子块,对每个子块进行加权计算,计算子块间的亮度相似度、对比度相似度和结构相似度,并采用加权平均方法融合局部相似度得到全局相似度,可以综合考虑图像的局部和全局特征,提高缺陷检测的精度和可靠性。
31、通过将二值图像分割为前景区域和背景区域,对前景区域进行连通域分析、形态学处理和轮廓提取,获取缺陷区域的几何特征,可以精确定位和描述缺陷区域,为后续的缺陷分析和维修提供重要依据。
32、通过将最终的缺陷区域标记在采集的电网图像数据上,生成缺陷可视化结果,可以直观、形象地展示缺陷区域,便于运维人员快速定位和处理缺陷,提高电网运维的效率和质量。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280239.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。