一种具有现场量值传递的双目三维点探测方法及装置
- 国知局
- 2024-08-30 14:25:57
本发明涉及机器视觉,特别是指一种具有现场量值传递的双目三维点探测方法及装置。
背景技术:
1、随着工业技术的不断进步,越来越多具备高精度表面的机械零件被广泛应用于工程领域,这些零件的表面质量和形状对它们的性能和使用寿命至关重要。它们通常具有复杂的曲面,测量时不仅需要能够准确测量表面的粗糙度,还需要能够测量零件表面的整体轮廓,因此这类零件对测量仪器提出了大范围与高精度的测量要求。
2、接触式轮廓仪凭借测量范围大、可靠性高与对环境要求低等诸多优点,在零件表面轮廓测量领域被广泛应用。当前问世的接触式轮廓仪可分为两类:三坐标测量机与视觉测量光笔。三坐标测量机由主机机械系统与测头系统构成,通过在x、y、z三轴方向上的组合机械运动实现对测头接触点的精准测量,但其测量范围受到机械装置尺寸的限制,且机体通常十分笨重不可移动,缺乏灵活性。视觉测量光笔由双目全局跟踪器与带标志点测量笔构成,其特点是由双目全局跟踪器通过标志点跟踪测量笔位姿进而求解出测点坐标,具有较高灵活性,但其测量范围受限于双目跟踪器的视场范围,且需保证跟踪器固定不动,测量过程仍有较大限制。
3、针对上述两类接触式轮廓仪设备的缺陷,目前尚未提出有效的解决方案。
技术实现思路
1、本发明提供了一种具有现场量值传递的双目三维点探测方法及装置,以解决现有接触式轮廓仪设备缺乏灵活性、测量范围受限与测量基准不可移动等技术问题,实现大范围现场高精度灵活测量。
2、为解决上述技术问题,本发明提供了如下技术方案:
3、一方面,本发明提供了一种具有现场量值传递的双目三维点探测方法,采用双目三维探针实现,所述双目三维探针包括双目相机和探针,所述探针远离测头的一端与所述双目相机刚性连接,所述双目三维点探测方法包括:
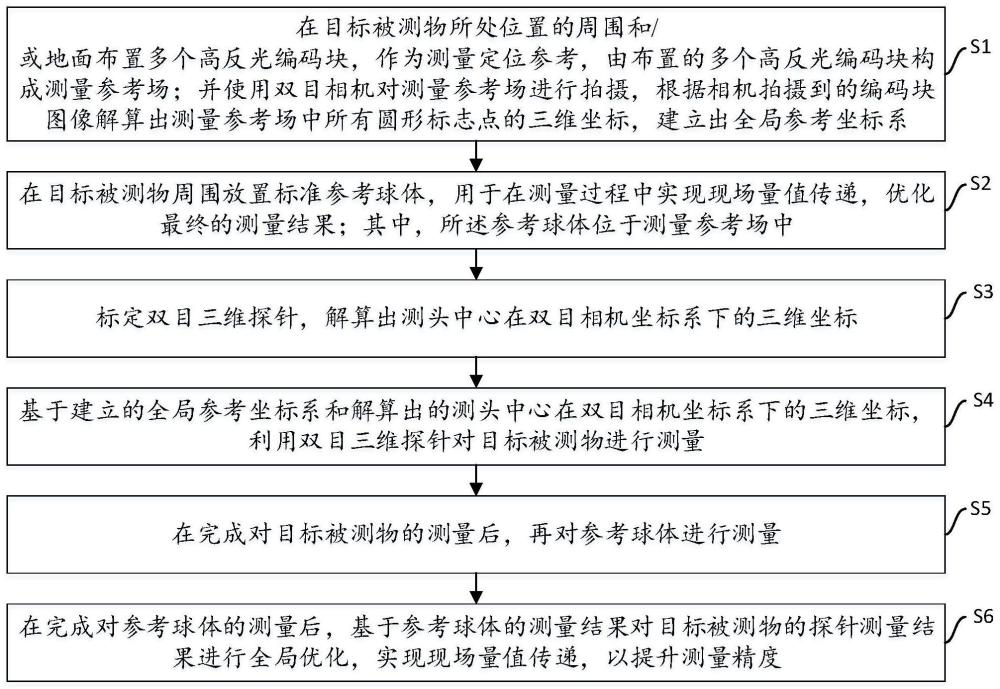
4、在目标被测物所处位置的周围和/或地面布置多个反光编码块,构成测量参考场;并使用双目相机对测量参考场进行拍摄,根据拍摄到的编码块图像解算出测量参考场中所有编码块上圆形标志点的三维坐标,建立出全局参考坐标系;
5、在目标被测物周围放置参考球体;其中,所述参考球体位于测量参考场中;
6、对双目三维探针进行标定,解算出测头中心在双目相机坐标系下的三维坐标;
7、基于建立的全局参考坐标系和解算出的测头中心在双目相机坐标系下的三维坐标,利用双目三维探针对目标被测物和参考球体分别进行测量;
8、基于参考球体的测量结果对目标被测物的测量结果进行修正,提升测量精度。
9、进一步地,在目标被测物所处位置的周围和/或地面布置多个反光编码块,构成测量参考场时,所用的编码块的编码块属性需预先设定;其中,编码块属性包括:编码块的圆形标志点大小、排列顺序以及编码解码规则;测量参考场的范围大小需保证能够完全覆盖双目相机的视场,保证双目相机在测量过程中能够始终拍摄到测量参考场;编码块布置间距在允许误差范围内需尽可能一致,保证编码块能够覆盖双目相机的视野,并保证双目相机在工作中能拍摄到多个编码块;
10、所述根据拍摄到的编码块图像解算出测量参考场中所有编码块上圆形标志点的三维坐标,建立出全局参考坐标系,包括:
11、采用双目相机对测量参考场中的所有编码块进行多次拍摄;
12、根据拍摄的编码块的图像,采用计算机视觉技术,建立出全局参考坐标系;其中,解算标志点坐标时,按照设定的编码块属性对标志点进行识别与匹配。
13、进一步地,所述在目标被测物周围放置参考球体,包括:
14、当目标被测物的尺寸小于预设尺寸阈值时,在目标被测物旁放置一个参考球体,此时参考球体与目标被测物之间的距离不超过预设距离;
15、当目标被测物的尺寸不小于预设尺寸阈值时,在目标被测物的周围放置多个参考球体,且多个参考球体在目标被测物的最小外接矩形上均匀分布。
16、进一步地,当在目标被测物的周围放置多个参考球体时,至少要在目标被测物的最小外接矩形的四个顶点处以及四条边的中点处分别放置一个参考球体。
17、进一步地,所述对双目三维探针进行标定,解算出测头中心在双目相机坐标系下的三维坐标,包括:
18、在所述测量参考场布置一个标准圆锥;
19、将探针的测头放置在标准圆锥中,保证测头中心固定不动,改变双目相机姿态多次来拍摄测量参考场,根据拍摄结果,基于双坐标系下测头中心不变这一约束条件求解出测头中心在双目相机坐标系下的三维坐标;其中,双坐标系下测头中心不变指的是改变双目相机姿态进行标定时,测头中心坐标在全局参考坐标系与双目相机坐标系下均保持不变;根据所述约束,对双目三维探针进行标定包括:
20、设测头中心在全局参考坐标系下的坐标为pg=[xg,yg,zg]t,在双目相机坐标系下的坐标为pc=[xc,yc,zc]t,双目相机坐标系下三维点转换到全局坐标系下时绕x轴方向的旋转方向向量双目相机坐标系下三维点转换到全局坐标系下时绕y轴方向的旋转方向向量双目相机坐标系下三维点转换到全局坐标系下时绕z轴方向的旋转方向向量均为单位向量,且两两之间相互正交;相机位姿为其中,表示双目相机坐标系下三维点转换到全局坐标系下时在x轴方向上的平移量,表示双目相机坐标系下三维点转换到全局坐标系下时在y轴方向上的平移量,表示双目相机坐标系下三维点转换到全局坐标系下时在z轴方向上的平移量;根据位姿变换关系有:
21、pg=ripc+ti (1)
22、由公式(1)得标定误差项:
23、
24、设公式(2)中p=[xc,yc,zc,xg,yg,zg]t,构建最小二乘问题:
25、
26、式中,n为标定位姿数量;
27、对式(3)进行求解,得到标定结果p*,解算出测头中心在双目相机坐标系下与全局参考坐标系下的三维坐标,完成对双目三维探针的标定。
28、进一步地,利用双目三维探针对目标被测物和参考球体分别进行测量,包括:
29、测量时,探针的测头接触待测物表面的待测点,双目相机拍摄测量参考场;
30、根据双目相机拍摄到的圆形标志点解算出双目相机在全局参考坐标系下的位姿;其中,所述待测物指的是所述目标被测物或所述参考球体;
31、根据解算出的双目相机在全局参考坐标系下的位姿,结合标定出的测头中心在双目相机坐标系下的三维坐标,解算出测头中心在全局参考坐标系下的坐标,完成对待测点的测量,得到待测点的三维坐标;其中,获取待测点的三维坐标的方式为:设双目相机在全局参考坐标系下的位姿为(r,t),测头中心在双目相机坐标系下的三维坐标为pc,则最终的待测点的三维坐标为pr=rpc+t。
32、进一步地,所述根据双目相机拍摄到的圆形标志点解算出双目相机在全局参考坐标系下的位姿,包括:
33、设标志点在双目相机坐标系下的三维坐标为p={p1,p2,...pn},其对应点在全局参考坐标系下的坐标为q={q1,q2,...qn},两组点的质心分别为与则两组点的去质心坐标分别为p'={pi'|pi'=pi-μp}与q'={qi'|qi'=qi-μq},其中,pi为第i个标志点在双目相机坐标系下的三维坐标;qi为第i个标志点在全局参考坐标系下的三维坐标;i=1,2,...,n;n为标定位姿数量;
34、计算矩阵并进行svd分解:
35、w=u∑vt (4)
36、其中,u与v为对矩阵w进行svd分解后得到的酉矩阵,∑为分解得到的非负实数对角矩阵;t表示矩阵的转置;
37、则双目相机到全局参考坐标系的旋转矩阵为:
38、r=uvt (5)
39、平移向量为:
40、t=μq-rμp (6)
41、至此完成对双目相机位姿的解算。
42、进一步地,基于参考球体的测量结果对目标被测物的测量结果进行修正,包括:
43、当只放置一个参考球体时,使用参考球体直径作为量值传递基准,对目标被测物的测量结果进行修正;
44、当放置多个参考球体时,使用参考球体间的球心距作为量值传递基准,对目标被测物的测量结果进行修正。
45、进一步地,所述当只放置一个参考球体时,使用参考球体直径作为量值传递基准,对目标被测物的测量结果进行修正,包括:
46、设对参考球体的原始测量结果为m={pi|pi=(xi,yi,zi),i=1,2,...,m},其中,xi,yi,zi为第i个测点的三维坐标;m为测点数量;
47、对测量结果m进行四阶多项式修正:
48、
49、式中,li为各测点pi到全局坐标系的距离;a1、a2、a3、a4为对x轴坐标的多项式修正系数;b1、b2、b3、b4为对y轴坐标的修正系数;c1、c2、c3、c4为对z轴坐标的修正系数;对参考球体半径的测量误差项为:
50、
51、式中,为参考球体的标称半径;r为测头半径;a,b,c为参考球体球心三维坐标;
52、构建最小二乘问题:
53、
54、式中,k=(a1,a2,a3,a4,b1,b2,b3,b4,c1,c2,c3,c4)为待求解多项式系数;
55、求解函数f的最优解得到修正系数后,利用得到的修正系数对目标被测物的测量结果进行修正,完成基于量值传递的全局优化。
56、进一步地,所述当放置多个参考球体时,使用参考球体间的球心距作为量值传递基准,对目标被测物的测量结果进行修正,包括:
57、设对多个参考球体球心处原始测量结果为n={ci|ci=(xi,yi,zi),i=1,2,...,s};其中,xi,yi,zi为测量到的第i个球体球心坐标;s为参考球体数量;
58、对测量结果n进行四阶多项式修正:
59、
60、式中,li为测量到的参考球体球心到全局参考坐标系原点的球心距;a1、a2、a3、a4为对x轴坐标的多项式修正系数;b1、b2、b3、b4为对y轴坐标的修正系数;c1、c2、c3、c4为对z轴坐标的修正系数;对参考球体球心距的测量误差项为:
61、
62、式中,di为各参考球体到全局参考坐标系原点的标称球心距;i=1,2,...,s;
63、构建最小二乘问题:
64、
65、式中,k=(a1,a2,a3,a4,b1,b2,b3,b4,c1,c2,c3,c4)为待求解多项式系数;
66、求解函数f的最优解得到修正系数后,利用得到的修正系数对目标被测物的测量结果进行修正,完成基于量值传递的全局优化。
67、另一方面,本发明还提供了一种具有现场量值传递的双目三维点探测装置,包括:双目相机、探针、标准圆锥、高反光编码块以及工作站;
68、所述双目相机与探针刚性连接;测量过程中所述双目相机拍摄高反光编码块,所述探针接触测量目标被测物;所述双目相机与所述工作站之间实现数据通信;
69、所述双目相机拍摄高反光编码块图像,传输至工作站;
70、所述标准圆锥固定在测量参考场有效范围中,用于标定双目三维探针,解算出探针测头在双目相机坐标系下的三维坐标;
71、所述工作站包括如下功能模块:
72、编码块解码模块:用于提取双目相机拍摄到的编码块中标志点的二维像素坐标,并解码出各编码块的唯一编码值:
73、标志点解算模块:根据编码块编码值对双目相机拍摄到的左右图像中的标志点进行匹配,并结合双目相机标定参数解算出标志点在双目相机坐标系下的三维坐标;
74、双目相机位姿解算模块:根据标志点三维坐标对标志点和测量参考场进行3d-3d匹配,解算出双目相机在全局参考坐标系下的位姿;
75、测点坐标解算模块:根据双目相机位姿结合测头中心标定坐标解算出测点坐标。
76、再一方面,本发明还提供了一种电子设备,其包括处理器和存储器;其中,存储器中存储有至少一条指令,所述指令由处理器加载并执行,以实现上述方法。
77、又一方面,本发明还提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行,以实现上述方法。
78、本发明提供的技术方案带来的有益效果至少包括:
79、本发明提供了一种具有现场量值传递的双目三维点探测方法,不同于传统探针受限于定位设备的有效视野范围,该方法使用双目相机进行全局高精度反向定位,实现了双目视觉定位与探针接触测量的结合,所设计的双目三维探针能够进行无约束范围的主动灵活测量;同时该方法引入基于标准参考球体的现场量值传递方法,对测量结果进行全局优化、抑制修正测量误差,保证了测量结果在极大测量范围内精准可靠。具体地,本发明提供的具有现场量值传递的双目三维点探测方法通过在稳固物体上粘贴高反光编码块建立测量参考场,使用双目相机拍摄标志点实现全局位姿定位,结合测头中心标定坐标,实现对目标被测物表面测点的解算,最后根据对标准球体的测量结果对测点进行全局优化,提升最终的测量精度。本发明使用高反光编码块能够大幅度提升测量范围,实现灵活接触式测量,同时引入基于标准参考球体的现场量值传递方法,在保证测量精度的情况下,解决了现有接触式轮廓仪测量范围受限和缺乏测量灵活性的弊端。
本文地址:https://www.jishuxx.com/zhuanli/20240830/281979.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表