打桩机控制系统、打桩机、打桩机控制方法以及计算机可读存储介质与流程
- 国知局
- 2024-08-30 14:53:39
本发明涉及打桩设备,尤其涉及一种打桩机控制系统、打桩机、打桩机控制方法以及计算机可读存储介质。
背景技术:
1、打桩机是一种广泛应用于市政工程、桥梁围堰、建筑地基、高速铁路地基、公路地基、深坑支护的打拔桩作业机械。打桩机的工作原理是:利用振动锤偏心块转动产生振动,振动通过桩夹持器总成传到桩体,带动桩体周围土壤振动液化,减小土壤对桩的摩擦阻力,再依靠桩和振动锤重力及打桩机下压力作用达到沉桩目的,即下压力和激振力的共同作用可抵消桩端阻力及桩侧阻力。
2、目前,打桩机在实际作业过程中遇到的工况各不相同,例如,不同地质导致土壤临界振幅及摩擦系数各不相同,这使得打桩时的桩端阻力实时变化,而振动锤的振动幅度及打桩下压力需要机手根据实际工况和经验不断调整,这样不但降低了工作效率,浪费了发动机功率,而且工况恶劣时易导致振动锤的过热停机,影响到振动锤及主机的可靠性,严重的可能由于机手的误操作而导致脱桩等问题,存在极大的安全隐患。
3、在现有的技术中,提出有根据振动锤、动臂以及斗杆的工作状态数据来控制第一驱动泵的泵油量或者调整第二驱动泵的工况为分流工况或合流工况的技术方案。但是,相关技术是基于理论或经验阈值来调整现有工作状态的方法,无法做到对实时工作状态的精准控制,其控制精度差。另外,在该相关技术的控制方案中,只要提供的功率大于作业所需功率即可。但当地质变化而不需要过多功率时,则造成无用的功率消耗,无法实现自适应地质工况的高效节能作业。
技术实现思路
1、鉴于上述问题,本技术提供一种能够根据实际工况实时调整功率消耗的自适应打桩机控制系统、具备该打桩机控制系统的打桩机以及打桩机控制方法。
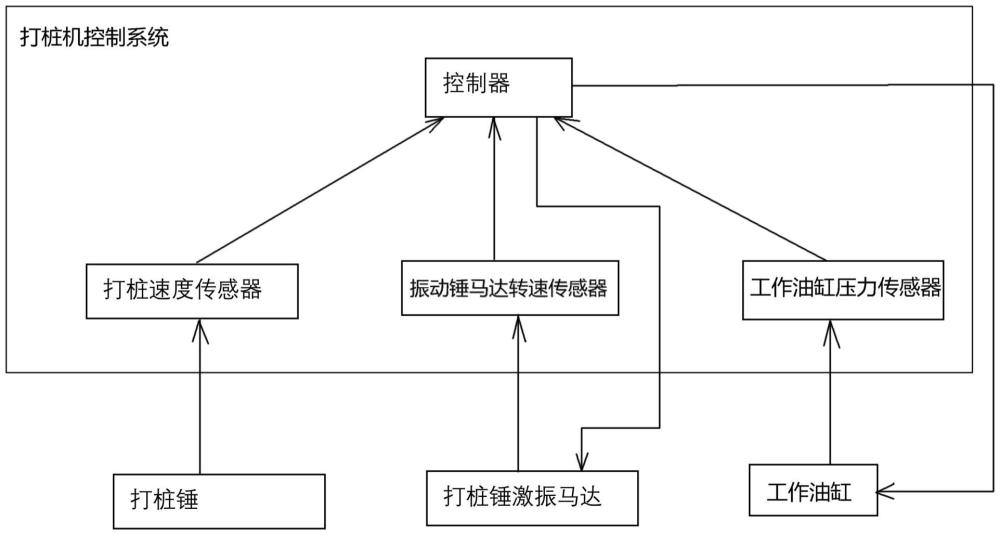
2、第一方面,本技术提供一种打桩机控制系统,所述打桩机包括工作油缸和振动锤激振马达,所述打桩机控制系统包括:打桩速度传感器,所述打桩速度传感器实时监测打桩机的打桩速度;以及控制器,所述控制器根据所述打桩速度的变化来分析打桩机的下压力与打桩阻力的大小关系,并根据分析结果实时调整所述工作油缸及/或所述振动锤激振马达的工作。
3、根据该打桩机控制系统,通过打桩速度的变化来实时分析打桩机的下压力与打桩阻力的大小关系,由此能够实时掌握土壤的土质变化。并且,由于根据打桩机的下压力与打桩阻力的大小关系实时地调整工作油缸以及/或者振动锤激振马达的运转,不需要机手凭借经验的人工调整,因此能够降低误操作的可能性,并能够自适应地质工况地进行高效作业。
4、在一些实施例中,所述打桩机控制系统还包括:振动锤马达转速传感器,所述振动锤马达转速传感器实时监测所述振动锤激振马达的转速;以及工作油缸压力传感器,所述工作油缸压力传感器实时监测所述工作油缸的压力,当所述打桩速度提升时,所述控制器判断为所述下压力大于所述打桩阻力,并优先降低所述振动锤激振马达的转速,当所述打桩速度降低时,所述控制器判断为所述下压力小于所述打桩阻力,并优先增加打桩机的所述工作油缸的流量。通过在打桩速度提升时优先降低振动锤激振马达的转速,在打桩速度降低时优先增加打桩机的工作油缸的流量,能够在确保打桩机正常工作的情况下尽量减少振动锤激振马达的运转,能够降低功耗,节约能源。
5、在一些实施例中,所述工作油缸压力传感器包括大臂油缸压力传感器、斗杆油缸压力传感器以及副臂油缸压力传感器,所述大臂油缸压力传感器实时监测大臂油缸的压力,所述斗杆油缸压力传感器实时监测斗杆油缸的压力,所述副臂油缸压力传感器实时监测副臂油缸的压力,所述控制器实时调整所述工作油缸的工作包括实时调整所述大臂油缸、所述斗杆油缸和所述副臂油缸中的至少一个的工作。
6、在一些实施例中,所述控制器中预先存储有工作油缸溢流阀设定值和马达转速极限值,所述工作油缸溢流阀设定值小于大臂油缸溢流阀的设定压力、斗杆油缸溢流阀的设定压力和副臂油缸溢流阀的设定压力之和,所述控制器将所述大臂油缸压力传感器、所述斗杆油缸压力传感器以及所述副臂油缸压力传感器所监测的压力之和设为工作油缸压力值,将所述振动锤马达转速传感器实时监测的振动锤激振马达的转速设为马达转速值,所述控制器将所述工作油缸压力值与所述工作油缸溢流阀设定值进行比较、将所述马达转速值与所述马达转速极限值进行比较,以判断打桩机工作的安全性。通过进行上述参数设定,能够便于控制器在打桩机的工作过程中对各参数进行比较判断,能够简化控制过程,提高控制效率。
7、在一些实施例中,在所述工作油缸压力值达到所述工作油缸溢流阀设定值、所述马达转速值达到所述马达转速极限值、且所述打桩速度没有提升的情况下,所述控制器发出报警信号。由于在最大输出功率的情况下预制桩都没有提升速度,说明该打桩机的规格已不适于当前的土质,根据本发明,能够在该情况下发出警报信号,停止作业,因此能够避免对设备造成损害或发生因误操作导致的安全问题。
8、在一些实施例中,所述打桩机控制系统对打桩机的工作控制包括初始自适应控制和循环自适应控制,分别用于在打桩机启动工作之时和之后对打桩机进行自适应控制;在打桩机启动工作之时,所述初始自适应控制首先增大所述振动锤激振马达的转速且增大各所述工作油缸中至少一个的流量。
9、通过分成初始自适应控制和循环自适应控制两个阶段,本发明的打桩机控制系统能够实现对打桩机实时工作状态的精准控制,提高控制精度。
10、在一些实施例中,所述打桩机控制系统还包括夹嘴油缸压力传感器,所述夹嘴油缸压力传感器实时监测夹嘴油缸的压力,所述控制器还根据所述夹嘴油缸的压力判断打桩机工作的安全性。
11、根据上述本发明的打桩机控制系统,可根据不同地质变化实时调整打桩机的作业油缸和振动锤激振马达的作业状态,能够避免无用的功率消耗,实现自适应地质工况的高效节能作业。
12、第二方面,本技术提供了一种打桩机,其包括上述实施例中任一项所述的打桩机控制系统。
13、第三方面,本技术提供了一种打桩机控制方法,其由上述实施例中任一项所述的打桩机控制系统进行实施。
14、在一些实施例中,在所述初始自适应控制中,当所述马达转速值达到所述马达转速极限值,且所述工作油缸压力值达到所述工作油缸溢流阀设定值时,若所述打桩速度为零,则发出报警信号,若打桩速度不为零,则维持当前的所述振动锤激振马达的转速。
15、在一些实施例中,在所述初始自适应控制中,当所述马达转速值达到所述马达转速极限值,而所述工作油缸压力值未达到所述工作油缸溢流阀设定值时,若所述打桩速度提升,则降低所述振动锤激振马达的转速,若所述打桩速度没有提升,则增加各所述工作油缸中至少一个的流量。
16、在一些实施例中,在降低所述振动锤激振马达的转速之后,判断所述振动锤激振马达的转速是否零,若所述振动锤激振马达的转速为零,则维持当前的所述振动锤激振马达的转速,若所述振动锤激振马达的转速不为零,则接着判断所述工作油缸压力值是否升高,若所述工作油缸压力值升高,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值没有升高,则降低所述振动锤激振马达的转速,并继续判断所述振动锤激振马达的转速是否零,在判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值时,若所述工作油缸压力值达到所述工作油缸溢流阀设定值,则维持当前的所述振动锤激振马达的转速,若所述工作油缸压力值未达到所述工作油缸溢流阀设定值,则降低所述振动锤激振马达的转速,并继续判断所述振动锤激振马达的转速是否零。
17、在一些实施例中,在增加各所述工作油缸中至少一个的流量之后,判断所述打桩速度是否提升,若所述打桩速度提升,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值达到所述工作油缸溢流阀设定值,则维持当前的所述振动锤激振马达的转速,若所述工作油缸压力值未达到所述工作油缸溢流阀设定值,则降低所述振动锤激振马达的转速,并继续判断所述振动锤激振马达的转速是否零,若所述打桩速度没有提升,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值达到所述工作油缸溢流阀设定值,则发出报警信号,若所述工作油缸压力值未达到所述工作油缸溢流阀设定值,则增加各所述工作油缸中至少一个的流量,并继续判断所述打桩速度是否提升。
18、在一些实施例中,在所述初始自适应控制中,当所述马达转速值未达到所述马达转速极限值,而所述工作油缸压力值达到所述工作油缸溢流阀设定值时,若所述打桩速度提升,则降低所述振动锤激振马达的转速,若所述打桩速度没有提升,则增大所述振动锤激振马达的转速。
19、在一些实施例中,在降低所述振动锤激振马达的转速之后,判断所述打桩速度是否降低,若所述打桩速度降低,则将所述振动锤激振马达的转速升高至本次降低之前的转速并维持该转速,若所述打桩速度没有降低,则继续降低所述振动锤激振马达的转速。
20、在一些实施例中,在增大所述振动锤激振马达的转速之后,检测所述打桩速度,并接着判断所述马达转速值是否达到所述马达转速极限值以及所述工作油缸压力值是否达到所述工作油缸溢流阀设定值。
21、在一些实施例中,在所述初始自适应控制中,当所述马达转速值未达到所述马达转速极限值,且所述工作油缸压力值未达到所述工作油缸溢流阀设定值时,若所述打桩速度提升,则降低所述振动锤激振马达的转速,若所述打桩速度没有提升,则增大所述振动锤激振马达的转速以及各所述工作油缸中至少一个的流量,并计算所述打桩速度,并接着判断所述马达转速值是否达到所述马达转速极限值以及所述工作油缸压力值是否达到所述工作油缸溢流阀设定值。
22、在一些实施例中,在降低所述振动锤激振马达的转速之后,判断所述打桩速度是否降低,若所述打桩速度没有降低,则继续降低所述振动锤激振马达的转速,若所述打桩速度降低,则增加各所述工作油缸中至少一个的流量。
23、在一些实施例中,在增加各所述工作油缸中至少一个的流量之后,判断所述打桩速度是否提升,若所述打桩速度没有提升,则将所述振动锤激振马达的转速升高至降低之前的转速并维持该转速,若所述打桩速度提升,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值达到所述工作油缸溢流阀设定值,则维持当前的所述振动锤激振马达的转速,若所述工作油缸压力值未达到所述工作油缸溢流阀设定值,则接着判断所述马达转速值是否零,若所述马达转速值为零,则维持所述振动锤激振马达的转速为零的状态,若所述马达转速值不为零,则降低所述振动锤激振马达的转速,并接着判断所述打桩速度是否降低。
24、在一些实施例中,在所述初始自适应控制之后,开始所述循环自适应控制,在所述循环自适应控制中,首先判断夹嘴油缸的压力是否超过预设的安全压力值,若超过所述安全压力值,则发出报警信号,若没有超过所述安全压力值,则判断所述打桩速度是否下降。
25、在一些实施例中,若所述打桩速度没有下降,接着判断所述马达转速值是否为零,若所述马达转速值为零,则维持所述振动锤激振马达的转速,并接着判断夹嘴油缸是否超过安全压力值,若所述马达转速值不为零,则降低所述振动锤激振马达的转速。
26、在一些实施例中,在降低所述振动锤激振马达的转速之后,判断所述打桩速度是否降低,若所述打桩速度没有降低,则接着判断所述马达转速值是否零,若为零,则维持当前的所述振动锤激振马达的转速,若不为零,则继续降低所述振动锤激振马达的转速,若所述打桩速度降低,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值达到所述工作油缸溢流阀设定值,则将所述振动锤激振马达的转速升高至降低之前的转速,若所述工作油缸压力值没有达到所述工作油缸溢流阀设定值,则增加各所述工作油缸中至少一个的流量。
27、在一些实施例中,在增加各所述工作油缸中至少一个的流量之后,判断所述打桩速度是否提升,若所述打桩速度提升,则维持所述振动锤激振马达的转速,若所述打桩速度没有提升,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值。
28、在一些实施例中,若所述打桩速度下降,接着判断所述马达转速值是否为所述马达转速极限值,若所述马达转速值为所述马达转速极限值,则发出报警信号,若所述马达转速值没有达到所述马达转速极限值,则接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若达到所述工作油缸溢流阀设定值,则增大所述振动锤激振马达的转速,若没有达到所述工作油缸溢流阀设定值,则增加各所述工作油缸中至少一个的流量。
29、在一些实施例中,在增大所述振动锤激振马达的转速之后,判断所述打桩速度是否提升,若所述打桩速度提升,则维持所述振动锤激振马达的转速,若所述打桩速度没有提升,则接着判断所述马达转速值是否达到所述马达转速极限值,若达到所述马达转速极限值,则发出报警信号,若没有达到所述马达转速极限值,则增大所述振动锤激振马达的转速,并接着判断所述打桩速度是否提升。
30、在一些实施例中,在增加了各所述工作油缸中至少一个的流量之后,接着判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值,若所述工作油缸压力值达到了所述工作油缸溢流阀设定值,则判断所述打桩速度是否提升,若所述打桩速度提升,则维持所述振动锤激振马达的转速,若所述打桩速度没有提升,则增大所述振动锤激振马达的转速,并继续判断所述打桩速度是否提升,若所述工作油缸压力值没有达到所述工作油缸溢流阀设定值,则判断所述打桩速度是否提升,若所述打桩速度提升,则维持所述振动锤激振马达的转速,若所述打桩速度没有提升,则增加各所述工作油缸中至少一个的流量,并继续判断所述工作油缸压力值是否达到所述工作油缸溢流阀设定值。
31、第四方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被运行时,执行上述的打桩机控制方法。
32、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240830/284364.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表