基于头朝向细胞的无人系统偏航角度获取方法、装置及介质
- 国知局
- 2024-09-05 14:45:18
本发明属于无人系统的类脑智能导航领域,具体涉及一种基于头朝向细胞的无人系统偏航角度获取方法、装置及介质。
背景技术:
1、无人系统(如机器人、无人车、无人机等)在许多行业都有广泛的应用。对于智能移动设备而言,自主导航是其发挥工作技能的关键能力。目前,导航系统可配备惯性测量单元、全球卫星导航系统、视觉传感器和雷达传感器等传感器。为了提高导航系统的精度,通常采用传感器组合导航方式。传统组合导航模型依赖于建立精确的数学公式和参数,面对复杂环境时导致传统导航系统的鲁棒性较弱。因此,需要一种更智能的方式来构建可靠的导航模型。类脑导航系统的设计思想来源于自然界中的动物活动,例如,大鼠等哺乳动物天生就有导航的能力,它们依靠自己的感官和大脑的判断来觅食、归巢等,具备在未知环境中导航和面向目标探索的能力。在模型化动物的导航行为的过程中,脑神经科学的发展为智能自主导航的发展提供了借鉴和思路。
2、方向感在动物导航行为中有着至关重要的地位,随着神经科学研究的逐步深入,头朝向细胞响应角速度信号刺激的机理已被部分认知,这为构建类脑的方向计算模型提供了基础。基于头朝向细胞的最新研究机理,头朝向细胞具有将角速度信号按时间积分更新头部方向信息的机制,然而基于吸引子神经网络的头朝向细胞角速度积分模型存在累积误差。此外,在视觉信息的刺激下,头朝向细胞能够根据视觉场景的变化重新定位方向表征,因此研究基于头朝向细胞的类脑方向计算方法,提高了类脑无人系统的方向辨识能力和导航的鲁棒性,对发展智能无人系统应用具有重要的研究意义。
技术实现思路
1、发明目的:为了解决一维头朝向细胞角速度积分模型在长航时条件下存在累积误差的问题,本发明提供了一种基于头朝向细胞的无人系统偏航角度获取方法、装置及介质。
2、技术方案:本发明所述的一种基于头朝向细胞的无人系统偏航角度获取方法,具体包括以下步骤:
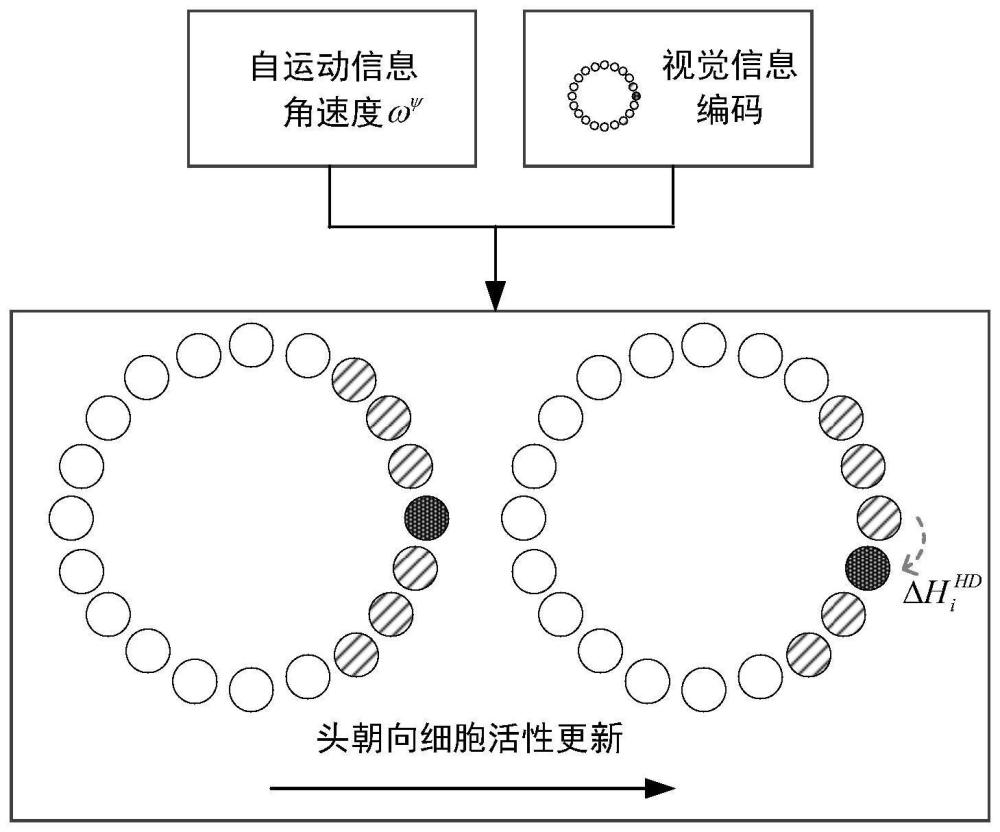
3、(1)无人系统的导航系统搭载惯性测量单元、全球导航卫星系统和视觉图像处理模块;惯性测量单元和全球导航卫星系统构成自运动信息模块,输出无人系统的偏航角速度;视觉图像处理模块处理图像信息获得无人系统的偏航角度;其中自运动信息模块模拟哺乳动物产生的自运动信息,视觉图像处理模块模拟哺乳动物感知的视觉信息;
4、(2)将视觉图像处理模块获得的偏航角度使用高斯函数进行信息编码;
5、(3)根据哺乳动物大脑中头朝向细胞的信息处理机制,基于吸引子神经网络的路径积分模型构建一维头朝向细胞角速度积分模型,将偏航角速度作为一维头朝向细胞角速度积分模型的输入;
6、(4)将步骤(2)编码过程产生的活性注入一维头朝向细胞角速度积分模型,使自运动信息和视觉信息融合,并利用视觉信息修正一维头朝向细胞角速度积分模型产生的累积误差;
7、(5)利用神经元群体信息解码方法计算偏航角度,将头朝向细胞所表示的首选角度按照活性信息的权重进行加权求和,从而获得无人系统的偏航角度。
8、进一步地,所述步骤(2)实现过程如下:
9、
10、其中,hiv,ψ为编码视觉信息产生的活性,σv,ψ是高斯函数的方差,λv,ψ为活性调节常数,为由视觉图像处理模块计算的偏航角度与头朝向细胞首选角度之间的差值,其计算的公式为:
11、
12、其中,ψv,hd为视视觉图像处理模块计算的偏航角度,为头朝向细胞的首选角度。
13、进一步地,步骤(3)所述一维头朝向细胞角速度积分模型的构建方法如下:
14、头朝向细胞兴奋性活性的生成:
15、
16、
17、s=(i-ic)(modn)
18、其中,为头朝向细胞i被激活产生的兴奋性活性,为头朝向细胞的活性,n为头朝向细胞的个数;为细胞之间的兴奋性连接权重,σ为方差,s为头朝向细胞i与头朝向细胞ic之间的距离;i为头朝向细胞的序号,ic其他头朝向细胞的序号;
19、头朝向细胞抑制性活性的生成:
20、
21、其中,为头朝向细胞产生的抑制性活性,为头朝向细胞之间的抑制性连接权重,其权重计算原理与兴奋性权重计算原理相同,为全局抑制性常数;
22、头朝向细胞的活性由兴奋性活性和抑制性活性共同作用产生:
23、
24、在偏航角速度的驱动下一维头朝向细胞角速度积分模型码产生偏航角度变化,由此头朝向细胞的活性产生变化为:
25、
26、其中,余数γ的计算方式为:
27、γ=f(δf,i-δ0)
28、
29、在γ=f(δf,i-δ0)中,δf为偏移量的小数部分,δ0为偏移量的整数部分;偏移量的整数部分δ0计算公式为其中为向下取整运算符号,偏移量的小数部分δf计算公式为δf=kωψ-δ0;
30、头朝向细胞的活性更新及规范化处理:
31、
32、
33、其中,头朝向细胞的活性更新通过活性变化实现,由于细胞产生的活性具有非负的特征,因此使用对活性进行非负性处理。
34、进一步地,步骤(4)所述的视觉编码偏航角度产生的活性注入头朝向细胞模型的方法为:
35、
36、其中,α为活性注入的调节常数。
37、进一步地,步骤(5)所述头朝向细胞所表示的首选角度按照细胞的数量设置为等差数列。
38、进一步地,步骤(5)所述利用神经元群体信息解码方法计算偏航角度通过以下公式实现:
39、
40、其中,ψp为偏航角的解算结果,为头朝向细胞的活性,为头朝向细胞的首选角度。
41、本发明所述的一种装置设备,包括存储器和处理器,其中:
42、存储器,用于存储能够在处理器上运行的计算机程序;
43、处理器,用于在运行所述计算机程序时,执行如上所述的基于头朝向细胞的无人系统偏航角度获取方法的步骤。
44、本发明所述的一种存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现如上所述的基于头朝向细胞的无人系统偏航角度获取方法的步骤。
45、有益效果:与现有技术相比,本发明的有益效果:本发明通过将对偏航角度进行信息编码产生的活性引入一维头朝向细胞角速度积分模型中来提升无人系统偏航角的计算精度,利用模拟哺乳动物感知的视觉信息的视觉图像处理方法计算得到的偏航角度信息进行数据融合,以校正一维头朝向细胞角速度积分模型中累积的误差;本发明解决了一维头朝向细胞角速度积分模型的在积分偏航角速度过程中产生的误差累积问题,提高脑启发的导航系统在偏航角度计算过程中的鲁棒性和准确性,为智能无人系统的自主导航方法提供工程化的类脑模型基础。
技术特征:1.一种基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,所述步骤(2)实现过程如下:
3.根据权利要求1所述的基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,步骤(3)所述一维头朝向细胞角速度积分模型的构建方法如下:
4.根据权利要求1所述的基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,步骤(4)所述的视觉编码偏航角度产生的活性注入头朝向细胞模型的方法为:
5.根据权利要求1所述的基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,步骤(5)所述头朝向细胞所表示的首选角度按照细胞的数量设置为等差数列。
6.根据权利要求1所述的基于头朝向细胞的无人系统偏航角度获取方法,其特征在于,步骤(5)所述利用神经元群体信息解码方法计算偏航角度通过以下公式实现:
7.一种装置设备,其特征在于,包括存储器和处理器,其中:
8.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现如权利要求1至6任一项所述的基于头朝向细胞的无人系统偏航角度获取方法的步骤。
技术总结本发明公开了一种基于头朝向细胞的无人系统偏航角度获取方法、装置及介质,所述方法包括:首先,利用高斯函数编码由视觉图像计算的角度来生成视觉活性;其次,利用吸引子神经网络构建一维头朝向细胞角速度积分模型,自运动信息模块产生的角速度作为模型的输入;然后,将视觉编码产生的活性注入一维头朝向细胞角速度积分模型,使自运动信息和视觉信息融合,并利用视觉信息修正一维头朝向细胞角速度积分模型产生的累积误差;最后,利用神经元群体信息解码方法计算偏航角度,将头朝向细胞所表示的首选角度按照活性信息的权重进行加权求和,从而获得无人系统的偏航角度。本发明提高了脑启发的导航系统在偏航角度计算过程中的鲁棒性和准确性。技术研发人员:陈雨荻,熊智,刘建业,杨闯,晁以寻,王晨旭,禹化雨受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288001.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表