基于RIS辅助毫米波MIMO-OFDM系统的用户定位方法
- 国知局
- 2024-09-05 14:47:10
本发明属于无线网络定位领域,尤其是涉及一种基于ris(reconfigurableintelligent surface,智能超表面)辅助毫米波mimo-ofdm(multiple input multipleoutput orthogonal frequency division multiplexing,多输入多输出-正交频分复用)系统的用户定位方法。
背景技术:
1、近年来,随着物联网应用需求的不断提升,如自动驾驶、智能制造、智能家居等,高精度定位服务在这些应用中发挥着至关重要的作用。然而,传统的定位系统,如全球定位系统,已无法满足这些新兴应用对于高精度定位的要求。因此,基于无线网络的定位系统正在成为未来一种有前途的物联网技术。其中,基于毫米波通信的定位技术能够实现信道参数的高精度估计而受到广泛关注,这些参数包括信道增益、时间延迟、离开角(angles ofdeparture,aod)和到达角(angles of arrival,aoa),都对估计用户位置起着关键作用。然而,毫米波通信也面临着许多挑战,包括路径损耗较高和视距易受阻塞等。
2、ris因其优越的电磁波操纵能力,在控制传播环境方面受到了学术界和工业界的广泛研究。ris是由大量无源和低成本的可调信号响应的亚波长反射元件组成,通过数字控制器联合调整所有元件的反射,ris可以帮助实现智能可控的无限传播环境,可以通过改变其反射信号的强度/方向,进而实现精确的波束形成和aoa估计,从而在具有挑战性的无线环境中实现更准确、更可靠的用户定位。由于ris具有低成本轻重量和有限厚度的特性,使其能够很容易地安装集成到建筑物墙面、天花板、路灯上等,因此,ris不仅在实际部署中显示出了极大的灵活性和兼容性,而且还可以创建额外的信号传播路径,为定位方案的设计提供额外的自由度。特别是,当视距(line-of-sight,los)路径在空间上被阻断时,ris可以提供从基站到用户的虚拟视距(virtual line-of-sight,vlos)路径来恢复高精度定位能力,这种情况在工厂和室内场景中会经常出现。
3、得益于在角度域和延迟域上的高分辨率,毫米波信号在提高信道估计和定位的性能方面有巨大潜力。然而,当毫米波信号遇到los路径被阻塞时,基于非视距(non-line-of-sight,nlos)路径的定位由于存在明显的反射损耗而导致定位精度严重降低。在传统的毫米波通信系统中,基于los路径的定位明显优于基于nlos路径的定位。因此,当los路径被阻塞时,ris辅助定位可为提高毫米波通信系统中的定位精度提供有前景的替代方案。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于ris辅助毫米波mimo-ofdm系统的用户定位方法,其使用能够通过建立用户与基站之间的虚拟视距路径来提高毫米波通信质量的ris辅助,来提升毫米波mimo-ofdm系统的定位精度。
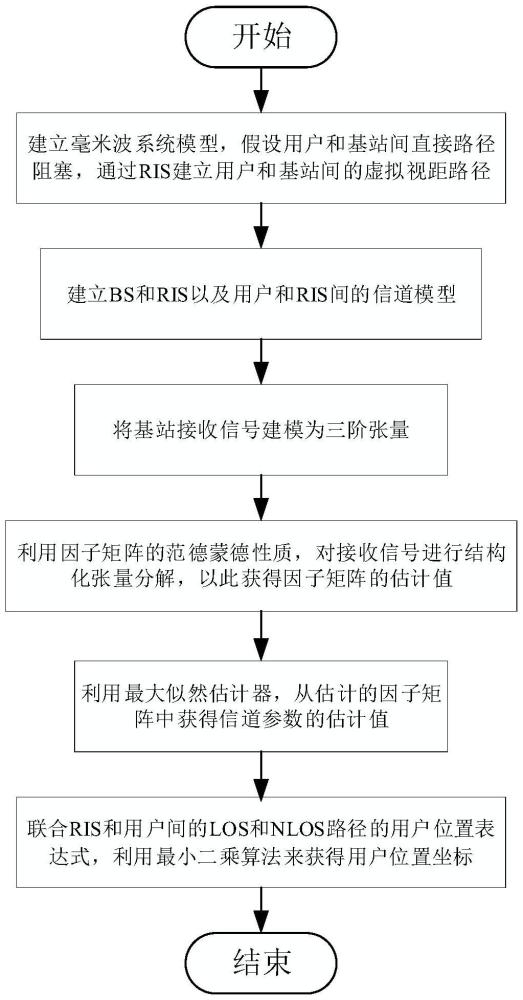
2、本发明解决上述技术问题所采用的技术方案为:一种基于ris辅助毫米波mimo-ofdm系统的用户定位方法,其特征在于该方法用于ris辅助的毫米波mimo-ofdm系统,在该系统中考虑一个二维场景,用户和基站之间采用上行链路通信,并设定用户和基站之间的los路径被阻塞,用户和基站之间通过ris建立的vlos路径进行通信,该方法包括以下步骤:
3、步骤1:在ris辅助的毫米波mimo-ofdm系统中,设定基站在二维坐标系中的真实位置为ris在二维坐标系中的真实位置为用户在二维坐标系中的真实位置为并将基站部署于二维坐标系的原点上,即设定在ris和用户之间存在l-1个未知位置的散射体,第i个散射体在二维坐标系中的真实位置为设定基站的天线数为nb,用户的天线数为nu,ris的反射元件数为m;其中,上标“t”表示向量或矩阵的转置,i=1,...,l-1,l表示ris和用户之间的路径数;
4、步骤2:在ris辅助的毫米波mimo-ofdm系统中,设定用户发射具有k个子载波的信号,其中仅有k0个子载波用于训练即用来估计信道参数,将这k0个子载波作为训练子载波,且每个训练子载波中有p0个时间帧,每个时间帧包含有t0个时隙;设定在各个时间帧中,用户采用不同的波束成形矩阵,基站采用不同的波束组合矩阵,将在第p个时间帧中用户采用的波束成形矩阵记为fp,将在第p个时间帧中基站采用的波束组合矩阵记为wp;设定在各个时隙中,ris采用不同的相移矩阵,将在第t个时隙中ris采用的相移矩阵记为diag(ψt);将基站和ris之间在第k个训练子载波上的频率域的信道模型表示为:将ris和用户之间在第k个训练子载波上的频率域的信道模型表示为:这两个信道模型均采用几何宽带的信道模型;其中,p=1,2,…,p0,t=1,2,…,t0,k=1,2,…,k0,fp的维数为nu×ns,ns表示用户和基站之间的射频链数目,wp的维数为nb×ns,diag(ψt)的维数为m×m,diag()表示创建一个对角矩阵,ψt表示在第t个时隙中ris采用的相移向量,表示基站和ris之间在第k个训练子载波上的频率域的信道,表示ris和用户之间在第k个训练子载波上的频率域的信道,α表示基站和ris之间的信道增益,且取均值为0、方差为1的复高斯分布,j为虚数表示,fs表示用户发射的信号的带宽,τbr表示基站和ris之间的时间延迟,θbr表示用户发射的信号从ris到基站的基站上信号的aoa,φbr表示用户发射的信号从ris到基站的ris上信号的aod,上标“h”表示向量或矩阵的共轭转置,l表示ris和用户之间的路径数,ris和用户之间的第条路径为视距路径,ris和用户之间的第条路径为经过第个散射体的反射路径即非视距路径,表示ris和用户之间的第条路径的信道增益,且取均值为0、方差为1的复高斯分布,表示ris和用户之间的第条路径的时间延迟,表示用户发射的信号从用户到ris的第条路径的ris上信号的aoa,表示用户发射的信号从用户到ris的第条路径的用户上信号的aod,ab(θbr)表示基站的阵列响应,db表示基站的天线间隔,λc表示用户发射的信号的波长,表示用户的阵列响应,du表示用户的天线间隔,ar(φbr)表示ris的关于反射角的阵列响应,表示ris的关于入射角的阵列响应,dr表示ris的反射元件间隔,
5、步骤3:在ris辅助的毫米波mimo-ofdm系统的上行链路的通信过程中,用户发射的信号经过ris的反射到达基站,将基站在第k个训练子载波的第p个时间帧的第t个时隙上的接收信号记为yk,p,t,然后令sp表示用户在第p个时间帧上发射的信号,假设sp与sk,p相等,并令fp=fpsk,p,再对式3.1取向量化,化简为:之后令rk表示在第k个训练子载波上的频率域的级联信道,将式2.1和式2.2代入中得到将式3.3代入式3.2中,得到其中,sk,p表示用户在第k个训练子载波的第p个时间帧上发射的信号,nk,p,t表示在第k个训练子载波的第p个时间帧的第t个时隙上的加性信道噪声,nk,p,t服从复高斯分布0表示加性信道噪声的均值,σ2表示加性信道噪声的方差,符号“⊙”为khatri-rao积,符号为克罗内克积,上标“*”表示向量或矩阵的共轭,表示级联信道增益,表示级联时间延迟,为引入的中间量,
6、步骤4:基于式3.4,将基站在所有训练子载波上的接收信号组合成三阶张量形式,表示为:令a、b和c均表示因子矩阵,且因子矩阵a、b和c均是列满秩的;其中,表示基站在所有训练子载波上的接收信号组合成的三阶张量,f=[x1,…,xp],符号表示向量外积,表示基站在所有训练子载波上的接收信号中的加性信道噪声的三阶张量;
7、步骤5:根据c=[g(τ1),…,g(τl)]和确定c具有范德蒙德性质;然后利用因子矩阵c的范德蒙德性质对进行结构化的张量分解,以得到a、b和c各自的估计值,具体过程如下:
8、步骤5.1:对进行模1展开,得到的模1展开矩阵,表示为:其中,y(1)表示的模1展开矩阵,表示的模1展开矩阵;
9、步骤5.2:使用选择矩阵扩展y(1)的维度,得到y(1)的扩展矩阵,表示为:;其中,ys表示y(1)的扩展矩阵,符号为向下取整运算符,表示维数为的全0矩阵,表示维数为k1×(l1-1)的全0矩阵,表示维数为k1×k1的单位矩阵,表示维数为p0×p0的单位矩阵,表示的扩展矩阵,表示由c的第行的所有元素构成的向量,表示由c的前k1行构成的矩阵,表示有c的前l1行构成的矩阵;
10、步骤5.3:对ys进行截断奇异值分解,得到ys的分解式,即ys=uσvh;其中,u表示左奇异向量矩阵,σ表示奇异值矩阵,v表示右奇异向量矩阵;
11、步骤5.4:引入一个非奇异矩阵使得和成立;然后令u1表示由u的第1行至第(k1-1)t0行构成的矩阵,令u2表示由u的第t0+1行至第k1t0行构成的矩阵,令表示由的第1行至第k1-1行构成的矩阵,令表示由的第2行至第k1行构成的矩阵,结合得到和再基于c具有范德蒙德结构,进一步得到z=diag{[z1,…,zl]},最终得到其中,z表示生成因子矩阵,表示第个生成因子,
12、步骤5.5:根据得到表达式然后对进行特征值分解,得到所有特征向量组成的矩阵和所有特征值组成的矩阵,对应记为q和λ,即有:再根据和将q作为的估计值,将λ作为z的估计值;其中,符号为矩阵的伪逆符号;
13、步骤5.6:计算c的估计值,记为计算b的估计值,记为计算a的估计值,记为其中,表示c的第列的估计值,表示λ的第行第列的元素值,表示b的第列的估计值,表示由的前k1个元素值构成的向量,表示维数为t0×t0的单位矩阵,表示q的第列,表示a的第列的估计值,表示由的前l1个元素值构成的向量,表示维数为nsp0×nsp0的单位矩阵,表示q-t的第列;
14、步骤6:根据计算的估计值,记为根据计算的估计值,记为根据计算的估计值,记为其中,符号“argmax”是求最大值运算符,符号“”为求模符号,符号“2”是求二范数的运算符,表示取复数的相位;
15、步骤7:计算的估计值,记为计算的估计值,记为当ris和用户之间的路径为视距路径时,表示为当ris和用户之间的路径为非视距路径时,表示为联合和并利用最小二乘算法,得到的估计值,记为其中,c表示用户发射的信号的传播速度,表示ris和用户之间的第1条路径的时间延迟即τru,1的估计值,表示用户发射的信号从用户到ris的第1条路径的ris上信号的aoa即的估计值,表示ris与第个散射体之间的距离,表示第个散射体在二维坐标系中的真实位置。
16、所述步骤4中,获取的具体过程为:基于式3.4,获取基站在第k个训练子载波的第p个时间帧的所有时隙上的接收信号,记为yk,p,
17、然后获取基站在第k个训练子载波的所有时间帧上的接收信号,记为yk,再将yk视为三阶张量的第k个切片,获得基站在所有训练子载波上的接收信号组合成的三阶张量其中,nk,p表示基站在第k个训练子载波的第p个时间帧的所有时隙上的接收信号中的加性信道噪声,
18、nk表示基站在第k个训练子载波的所有时间帧上的接收信号中的加性信道噪声,
19、与现有技术相比,本发明的优点在于:
20、在毫米波系统中,当基站和用户之间的视距路径被阻断时,基于非视距路径的定位精度将严重降低,但是,通过ris辅助可以建立虚拟视距路径,来增强毫米波系统的定位精度。利用ris级联信道的多维结构和低秩特性,本发明将接收信号建模为三阶低秩张量,降低了信号处理的维度。通过利用因子矩阵的范德蒙德性质,本发明设计了一种高效的基于结构化的张量分解算法,利用线性代数运算计算因子矩阵的闭式解形式,相比于交替迭代的张量分解,降低了张量分解算法的复杂度。最后,通过利用多径分量和估计的信道参数,使用最小二乘算法来估计毫米波系统中用户的位置,实验结果表明本发明方法能够提供厘米级的用户定位精度。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288107.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。