基于YOLOv8的光学遥感图像舰船检测方法及装置
- 国知局
- 2024-09-11 14:46:30
本发明涉及遥感图像识别,尤其涉及一种基于yolov8的光学遥感图像舰船检测方法及装置。
背景技术:
1、遥感技术是一种通过远距离观测和测量的科技手段,利用各种传感器如光学、微波和红外传感器,通过卫星、飞机或无人机等载体获取地球表面、大气和水体等目标的信息,并将其转化为可识别的遥感图像或数据。遥感图像包括遥感光学舰船图像,利用遥感光学舰船图像进行舰船目标检测,在海洋遥感领域得到高度重视。通过舰船目标检测可以及时有效地发现和提取目标舰船信息。
2、目前,基于卷积神经网络进行遥感舰船目标检测,需收集舰船和非舰船的遥感图像数据,并进行标注;选择卷积神经网络结构,并在训练集上进行训练,监控模型性能以防止过拟合;在模型评估阶段,利用测试集评估模型性能,调整超参数以优化性能;最后,将训练好的模型部署到实际应用环境中,并根据需要调整阈值和后处理得到舰船图像。然而,基于卷积神经网络进行遥感舰船目标检测,在检测舰船目标时,由于舰船目标的长宽尺度差异巨大,近岸舰船相对密集,并且舰船目标相对于背景十分渺小,使得检测舰船目标的性能大大降低,导致对微小密集舰船目标的检测精度较低。
技术实现思路
1、本发明实施例的目的是提供一种基于yolov8的舰船目标检测方法及装置,解决对微小密集舰船目标的检测精度较低的问题。
2、为解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明第一方面提供一种基于yolov8的光学遥感图像舰船检测方法,方法包括:
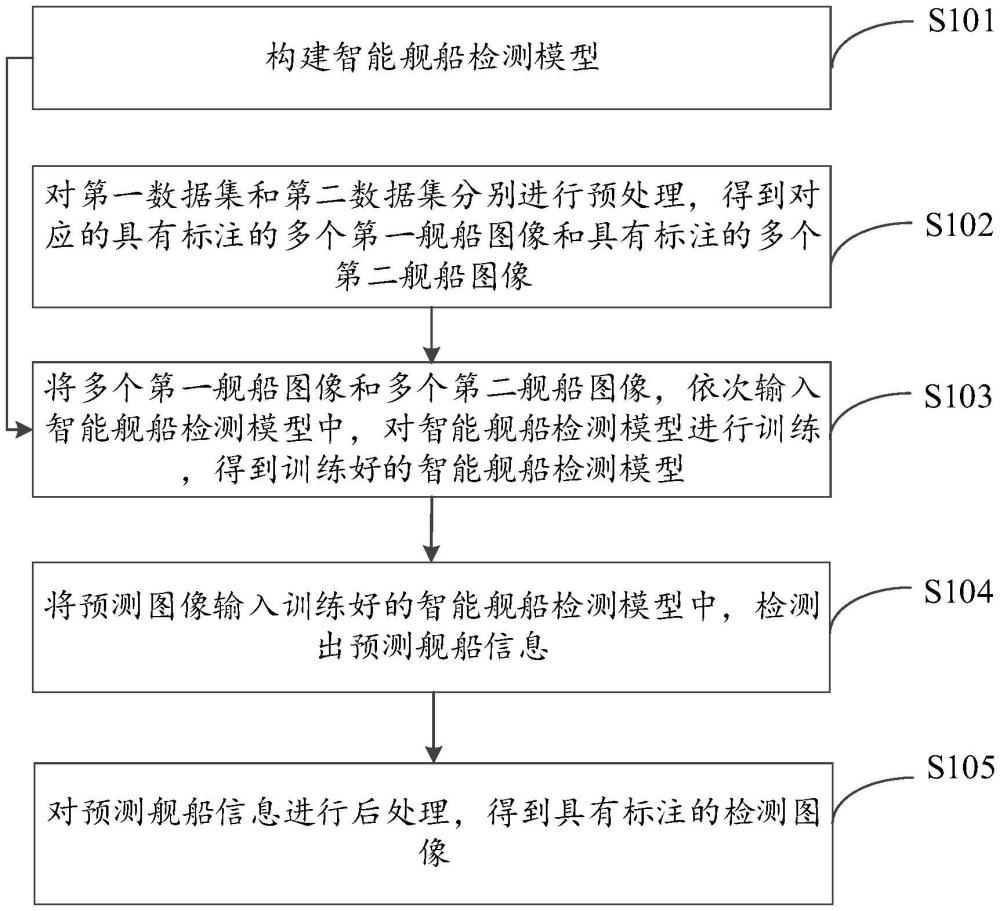
4、构建智能舰船检测模型,智能舰船检测模型依次包括yolov8的backbone模块、neck模块,backbone模块包括大分离卷积核模块、包含扩张残差子模块的通道到像素模块,neck模块包括无参数注意力模块;
5、对第一数据集和第二数据集分别进行预处理,得到对应的具有标注的多个第一舰船图像和具有标注的多个第二舰船图像,标注的目标格式适用于智能舰船检测模型;
6、将多个第一舰船图像和多个第二舰船图像,依次输入智能舰船检测模型中,对智能舰船检测模型进行训练,得到训练好的智能舰船检测模型;
7、将预测图像输入训练好的智能舰船检测模型中,检测出预测舰船信息;
8、对预测舰船信息进行后处理,得到具有标注的检测图像。
9、本申请第二方面提供一种基于yolov8的光学遥感图像舰船检测装置,装置包括:
10、构建模块,用于构建智能舰船检测模型,智能舰船检测模型依次包括yolov8的backbone模块、neck模块,backbone模块包括大分离卷积核模块、包含扩张残差子模块的通道到像素模块,neck模块包括无参数注意力模块;
11、预处理模块,用于对第一数据集和第二数据集分别进行预处理,得到对应的具有标注的多个第一舰船图像和具有标注的多个第二舰船图像,标注的目标格式适用于智能舰船检测模型;
12、训练模块,用于将多个第一舰船图像和多个第二舰船图像,依次输入智能舰船检测模型中,对智能舰船检测模型进行训练,得到训练好的智能舰船检测模型;
13、检测模块,用于将预测图像输入训练好的智能舰船检测模型中,检测出预测舰船信息;
14、后处理模块,用于对预测舰船信息进行后处理,得到具有标注的检测图像。
15、相较于现有技术,本发明提供的基于yolov8的光学遥感图像舰船检测方法及装置,构建智能舰船检测模型,对第一数据集和第二数据集分别进行预处理,得到对应的具有标注的多个第一舰船图像和具有标注的多个第二舰船图像;将多个第一舰船图像和多个第二舰船图像,依次输入智能舰船检测模型中,对智能舰船检测模型进行训练,得到训练好的智能舰船检测模型;将预测图像输入训练好的智能舰船检测模型中,检测出预测舰船信息;对预测舰船信息进行后处理,得到具有标注的检测图像。这样,由于智能舰船检测模型的backbone模块包括lskblock、引入dwr子模块的c2f模块,可以动态地调整网络的感受野,加强了不同尺度信息提取能力,使得特征图的特征表示更全面,并引入simam的neck模块,可以使得对微小密集舰船目标的检测精度较高。
技术特征:1.一种基于yolov8的光学遥感图像舰船检测方法,其特征在于,所述舰船目标检测方法包括:
2.根据权利要求1所述的光学遥感图像舰船检测方法,其特征在于,所述backbone模块依次包括2个卷积组模块、1个所述通道到像素模块、1个所述卷积组模块、1个所述通道到像素模块、1个所述卷积组模块、1个所述通道到像素模块、1个所述卷积组模块、1个所述通道到像素模块、1个所述大分离卷积核模块、1个快速空间金字塔池化模块。
3.根据权利要求2所述的光学遥感图像舰船检测方法,其特征在于,所述通道到像素模块依次包括1个所述卷积组模块、1个分割层、n个所述扩张残差子模块、1个拼接层和1个所述卷积组模块。
4.根据权利要求2所述的光学遥感图像舰船检测方法,其特征在于,所述neck模块依次包括1个上采样层、1个拼接层、1个所述通道到像素模块、1个所述上采样层、1个所述拼接层、1个所述通道到像素模块、1个所述无参数注意力模块、1个卷积组模块、1个所述拼接层、1个所述通道到像素模块、1个所述无参数注意力模块、1个所述卷积组模块、1个所述拼接层、1个所述通道到像素模块、1个所述无参数注意力模块。
5.根据权利要求4所述的光学遥感图像舰船检测方法,其特征在于,所述智能舰船检测模型还包括yolov8的head模块,所述head模块依次包括1个卷积组模块和1个普通卷积模块,所述将预测图像输入所述训练好的智能舰船检测模型中,检测出预测舰船信息,包括:
6.根据权利要求5所述的光学遥感图像舰船检测方法,其特征在于,所述将所述预测图像输入所述backbone模块中,输出第一特征图、第二特征图和第三特征图,包括:
7.根据权利要求5所述的光学遥感图像舰船检测方法,其特征在于,所述将所述第一特征图、所述第二特征图和所述第三特征图输入所述neck模块中,输出第四特征图、第五特征图和第六特征图,包括:
8.根据权利要求1所述的光学遥感图像舰船检测方法,其特征在于,所述对第一数据集和第二数据集分别进行预处理,得到对应的具有标注的多个第一舰船图像和具有标注的多个第二舰船图像,包括:
9.根据权利要求1所述的光学遥感图像舰船检测方法,其特征在于,所述预测舰船信息包括旋转角度、预设边界框、预设类别置信度和目标置信度,所述对所述预测舰船信息进行后处理,得到具有标注的检测图像,包括:
10.一种基于yolov8的光学遥感图像舰船检测装置,其特征在于,所述光学遥感图像舰船检测装置包括:
技术总结本发明提供基于YOLOv8的光学遥感图像舰船检测方法及装置,涉及遥感图像识别技术领域。此方法包括:构建智能舰船检测模型,对第一数据集和第二数据集分别预处理,得到具有标注的第一舰船图像和第二舰船图像;将第一舰船图像和第二舰船图像依次输入智能舰船检测模型,对智能舰船检测模型进行训练,得到训练好的智能舰船检测模型;将预测图像输入训练好的智能舰船检测模型,检测出预测舰船信息;对预测舰船信息进行后处理,得到具有标注的检测图像。智能舰船检测模型的Backbone模块包括LSKblock、引入DWR模块的C2f模块,使特征图的特征表示全面,且引入SimAM的Neck模块,使对微小密集舰船目标的检测精度较高。技术研发人员:侯彪,刘镇源,曹震,任博,杨志受保护的技术使用者:西安电子科技大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292102.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表