一种基于无人机多传感融合的环境巡查系统的制作方法
- 国知局
- 2024-10-09 16:05:34
本发明涉及林业环境巡查,尤其涉及一种基于无人机多传感融合的环境巡查系统。
背景技术:
1、所谓多传感器信息融合(multi-sensor information fusion,msif),就是利用计算机技术将来自多传感器或多源的信息和数据,在一定的准则下加以自动分析和综合,以完成所需要的决策和估计而进行的信息处理过程。在林业监控中,无人机巡查是常见的巡查方式。通过无人机对林业资源进行资源调查,既能够提高资源调查的速度和精度,又能够获取多层次的林业资料,提升林业监测的便捷程度和准确程度。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种基于无人机多传感融合的环境巡查系统,通过传感器融合处理模块快速处理和整合数据以判断是否产生应急事件,利用应急模块生成调度策略,便于快速响应,及时处理应对应急事件。
2、为实现上述目的,本发明提供了如下技术方案:
3、一种基于无人机多传感融合的环境巡查系统,包括
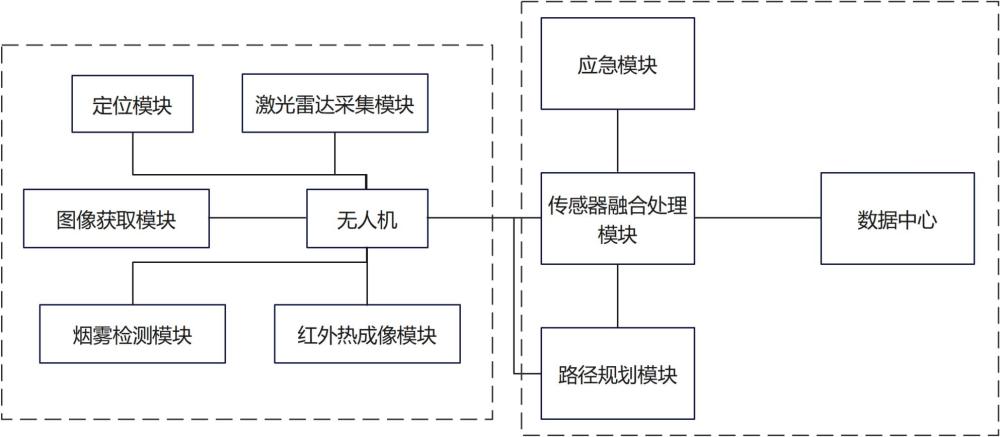
4、无人机,所述无人机搭载有定位模块、激光雷达采集模块、图像获取模块、红外热成像模块、烟雾检测模块,所述定位模块根据gps定位获取无人机的位置信息,所述激光雷达采集模块获取树冠特征以定义为树冠特征信息;
5、传感器融合处理模块,所述传感器融合处理模块与所述图像获取模块、红外热成像模块、烟雾检测模块通讯以获取是否产生应急事件,所述应急事件包括火灾,若产生应急事件,则所述定位模块和激光雷达采集模块同步工作获取事件发生地点;
6、路径规划模块,所述路径规划模块配置有常规路径规划策略和应急路径规划策略,当产生应急事件时则执行所述应急路径规划策略以生成应急巡检路径,其余时间执行常规路径规划策略以生成常规巡检路径;
7、应急模块,当所述传感器融合处理模块获取到产生应急事件时,所述应急模块根据预设的预测模型预测火势发展情况并生成调度策略。
8、进一步地,所述环境巡查系统包括数据中心,所述数据中心配置有环境数据库,所述环境数据库内记录有巡检位置信息和对应的日常巡检树冠特征信息,当无人机执行常规巡检路径时,所述定位模块和所述激光雷达采集模块同步工作,所述定位模块连续获取位置信息并输送至数据中心,所述激光雷达采集模块连续获取树冠特征信息并输送至数据中心,所述数据中心判断同一时段内的位置信合和所述树冠特征信息是否符合连续对应关系,若符合则将位置信息作为巡检位置信息,将所述树冠特征信息作为日常巡检树冠特征信息记录于所述环境数据库内。
9、进一步地,所述事件发生地点的获取步骤如下:
10、所述定位模块获取应急事件发生地以定义为初步定位信息,
11、以所述初步定位信息为中心获取初步定位范围,
12、所述激光雷达采集模块获取周围树冠特征信息,所述周围树冠特征信息具体为应急事件发生地周围的树冠特征,以所述初步定位范围为索引在所述环境数据库内匹配对应的日常巡检树冠特征信息,将所述周围树冠特征信息与所述日常巡检树冠特征信息进行特征比对,若相似度高于预设的相似度阈值,则将对应的日常巡检树冠特征信息作为实际树冠特征信息,根据实际树冠特征信息在所述环境数据库内匹配对应的巡检位置信息作为所述事件发生地点。
13、进一步地,将历史林业火灾数据,包括温度、湿度、风向、风速、植被覆盖情况、火势及其蔓延情况作为训练集以训练得到所述预测模型,获取当前温度、当前湿度、当前风向、当前风速、当前植被覆盖情况和当前火势并输入所述预测模型得到预测火势发展情况,所述预测火势发展情况包括预测时间、对应的预测火势范围、预测蔓延方向和预测蔓延速度。
14、进一步地,所述调度策略包括:
15、获取周边消防点的位置以计算消防调度时间,所述消防调度时间具体为由各个消防点响应至抵达事件发生地点的必要时长;
16、获取并根据所述预测火势发展情况调度消防分布并生成若干干预地点,所述干预地点位于所述预测蔓延方向上,且所述预测火势蔓延速度越大的区域上干预地点的分布密度越大;
17、根据所述干预地点生成若干调度信息,所述调度信息反映周边消防点与干预地点的对应调度关系。
18、进一步地,所述应急路径规划策略包括:
19、获取预测火势发展情况,根据所述预测时间以及对应的预测火势范围,以等时间间隔生成若干模拟时间以及对应的模拟火势范围,以无人机当前位置为起点生成应急巡检路径,使得在模拟时间下无人机位于对应的模拟火势范围的边界上。
20、进一步地,将所述事件发生地点、植被覆盖情况、火灾时间进行记录作为历史火灾数据,所述常规巡检路径规划策略包括
21、获取时间作为当前季节数据,根据所述季节数据和历史火灾数据在模拟林业地图上生成若干风险地点,
22、生成常规巡检路径,所述常规巡检路径覆盖各个所述风险地点。
23、进一步地,所述数据中心配置有数据库更新策略,所述数据库更新策略配置有计划更新时间,当抵达计划更新时间时,无人机依据预设的巡检更新路径重新采集待定树冠特征信息,将所述待定树冠特征信息与日常巡检树冠特征信息进行相似度比对,若树冠相似度低于预设的树冠相似度阈值,则查找是否存在树冠关联特征,若存在关联特征,则将所述待定树冠特征信息作为更新后的日常巡检树冠特征信息写入所述环境数据库。
24、进一步地,所述树冠特征信息包括树冠高度特征和冠幅特征,所述树冠高度特征的获取步骤包括:所述激光雷达采集模块获取激光雷达数据,提取林区的三维激光点云进行投影后生成对应的点云图像,根据点云图像进行边缘分割以获取树冠高度特征和冠幅特征。
25、进一步地,所述无人机依据所述应急巡检路径进行巡检以获取火势实际蔓延情况,利用火势实际蔓延情况对所述预测模型进行修正。
26、本发明的有益效果:
27、1、本发明通过设置有的传感器融合处理模块,利用定位模块、激光雷达采集模块、图像获取模块、红外热成像模块、烟雾检测模块等多个检测模块获取林区的巡查数据,进而判断是否产生应急事件,当判断产生应急事件如火灾时,利用路径规划模块快速生成应急巡检路径,应急模块生成调度策略,便于快速应对突发险情,提高响应和调度速度,便于快速控制险情;
28、2、本发明通过定位模块获取无人机的位置,而后结合gps定位以及树冠特征信息精确定位事件发生地点,避免gps在应急条件下产生定位错误的问题,便于应急调度以及提高对后续火势发展情况预测的准确程度,并且预测火势发展情况依据历史林业火灾数据计算生成,准确程度高,便于提前进行防控,减少火势蔓延;
29、3、本发明通过应急巡检路径的设置,便于获取火势的实际蔓延情况,将实际蔓延情况与模拟火势范围进行比对得到进而便于对预测模型进行修正,提升预测模型预测的准确性。
技术特征:1.一种基于无人机多传感融合的环境巡查系统,其特征在于:包括
2.根据权利要求1所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述环境巡查系统包括数据中心,所述数据中心配置有环境数据库,所述环境数据库内记录有巡检位置信息和对应的日常巡检树冠特征信息,当无人机执行常规巡检路径时,所述定位模块和所述激光雷达采集模块同步工作,所述定位模块连续获取位置信息并输送至数据中心,所述激光雷达采集模块连续获取树冠特征信息并输送至数据中心,所述数据中心判断同一时段内的位置信合和所述树冠特征信息是否符合连续对应关系,若符合则将位置信息作为巡检位置信息,将所述树冠特征信息作为日常巡检树冠特征信息记录于所述环境数据库内。
3.根据权利要求2所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述事件发生地点的获取步骤如下:
4.根据权利要求1所述的基于无人机多传感融合的环境巡查系统,其特征在于:将历史林业火灾数据,包括温度、湿度、风向、风速、植被覆盖情况、火势及其蔓延情况作为训练集以训练得到所述预测模型,获取当前温度、当前湿度、当前风向、当前风速、当前植被覆盖情况和当前火势并输入所述预测模型得到预测火势发展情况,所述预测火势发展情况包括预测时间、对应的预测火势范围、预测蔓延方向和预测蔓延速度。
5.根据权利要求4所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述调度策略的生成步骤包括:
6.根据权利要求4所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述应急路径规划策略包括:
7.根据权利要求3所述的基于无人机多传感融合的环境巡查系统,其特征在于:将所述事件发生地点、植被覆盖情况、火灾时间进行记录作为历史火灾数据,所述常规巡检路径规划策略包括
8.根据权利要求3所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述数据中心配置有数据库更新策略,所述数据库更新策略配置有计划更新时间,当抵达计划更新时间时,无人机依据预设的巡检更新路径重新采集待定树冠特征信息,将所述待定树冠特征信息与日常巡检树冠特征信息进行相似度比对,若相似度低于预设的相似度阈值,则查找是否存在树冠关联特征,若存在关联特征,则将所述待定树冠特征信息作为更新后的日常巡检树冠特征信息写入所述环境数据库。
9.根据权利要求1所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述树冠特征信息包括树冠高度特征和冠幅特征,所述树冠高度特征的获取步骤包括:所述激光雷达采集模块获取激光雷达数据,提取林区的三维激光点云进行投影后生成对应的点云图像,根据点云图像进行边缘分割以获取树冠高度特征和冠幅特征。
10.根据权利要求6所述的基于无人机多传感融合的环境巡查系统,其特征在于:所述无人机依据所述应急巡检路径进行巡检以获取火势实际蔓延情况,利用火势实际蔓延情况对所述预测模型进行修正。
技术总结本发明涉及林业环境巡查技术领域,公开了一种基于无人机多传感融合的环境巡查系统,包括无人机,传感器融合处理模块,路径规划模块和应急模块;定位模块根据GPS定位获取无人机的位置信息,激光雷达采集模块获取树冠特征以定义为树冠特征信息;传感器融合处理模块获取是否产生应急事件,若产生应急事件,则定位模块和激光雷达采集模块同步工作获取事件发生地点;路径规划模块配置有常规路径规划策略和应急路径规划策略,当产生应急事件时则执行应急路径规划策略以生成应急巡检路径,其余时间执行常规路径规划策略以生成常规巡检路径;当传感器融合处理模块获取到产生应急事件时,应急模块根据预设的预测模型预测火势发展情况并生成调度策略。技术研发人员:张峰,陈晟,叶周幸,尤其浩,翟旭恒,乐杨受保护的技术使用者:杭州鸿森林业调查规划设计有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311638.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表