一种基于PSO的卫星支架轻量化优化方法
- 国知局
- 2024-10-09 14:43:39
本发明涉及航天器优化设计,尤其涉及一种基于pso(粒子群优化算法)的卫星支架轻量化优化方法。
背景技术:
1、目前,小型卫星成为了市场热点,而在设计研发中,如何进行卫星优化设计成为了一个重要的课题。现有的优化设计,尤其是有限元的优化设计方法通常效率不高,比如采用传统遍历的设计方式不仅计算量大,而且难以做到找到的节点位置完全精确,优化后的重量并不一定最轻,目前现有的有限元优化设计大多仍采用依靠人工经验的方法,同样无法保证最终方案为最优方案。
2、一般而言,某些有限元计算具有一定程度的计算量,虽然有些python库提供了并行计算的功能,但python的并行计算性能可能不够高效,比如采用传统的遍历的方式找2动点位置时,在一立方米的空间中,以一毫米为单位进行遍历,输出12个单元载荷需要进行几千次计算,若采用传统的遍历的方式找3动点位置或更多动点位置计算量则更加庞大,就算是可使用python中的并行计算库如mpi4py、dask等来实现并行化计算,利用gpu加速计算,则又会增加算力成本题。
3、因此,如何在卫星支架轻量化优化的过程中,降低计算负担,成为了需要进一步研究的方向。
技术实现思路
1、本发明的实施例提供基于pso的卫星支架轻量化优化方法,能够在卫星支架轻量化优化的过程中降低计算负担。
2、为达到上述目的,本发明的实施例采用如下技术方案:
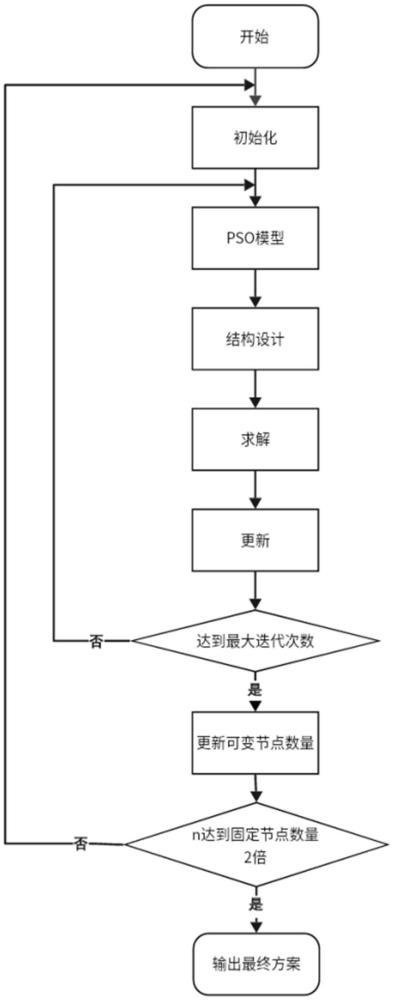
3、步骤一、计算机加载pso(粒子群优化算法)模型并进行参数初始化;其中,初始化的参数包括:求解对象、优化目标维度d、惯性权重w、第一加速因子c1和第二加速因子c2、第一随机因子r1和第二随机因子r2、粒子的数量n和迭代次数m。
4、步骤二、确定节点变量,并设定可变节点的可行域;
5、步骤三、在所建立的卫星支架模型上施加载荷,并计算卫星支架模型中的各个单元的内力;
6、步骤四、利用计算得到的各个单元的内力,优化得到可变节点的最优方案,直至可变节点数量达到除可变节点以外的固定节点数量的2倍。具体的,将卫星内部的n个可变节点坐标作为设计变量,在可行区域内进行随机采样。将变量n作为pso模型维度参数,结合卫星支架载荷情况和边界条件,通过feon库进行有限元分析生成各个支杆的内力f,随后将计算出的的内力f、杆长之和作为优化目标重新代入到pso模型中进行迭代优化,得到n个可变节点前提下的轻量化最优解和可变节点的位置坐标。改变可变节点数量n,重复以上步骤,最后通过对比不同n个可变节点所对应的轻量化最优解,输出所有可能情况下的最优方案。
7、所述步骤一,包括:从所建立的卫星支架模型采集n个可变节点,优化目标维度d对应可变节点的横、竖和纵坐标;例如:求解对象为卫星支架中部的n个可变节点,对应的维度d对应可变节点的横、竖、纵坐标,则本实施例中d为3n,如图2、3、4所示,对应本实施中可变节点数量n分别为1、2、3,则d分别对应为3、6、9;
8、在优选方案中,0≤c1≤4,0≤c2≤4,其中,r1和r2分别为0至1之间的随机数。加速因子c1c2指控制粒子在搜索空间中移动的参数,c1控制了粒子向其历史最佳位置的吸引力,而c2控制了粒子向整个群体的最佳位置的吸引力,一般而言,c1和c2取值范围在0至4之间,本实施例中c1c2设置为2;c1=c2=2,r1=0.7,r2=0.5,n=50,m=200。随机因子r1和r2通常用于计算粒子的速度更新,通常为0至1之间的随机数,用来引入随机性,以增加粒子群算法的多样性和全局搜索能力,本实施例中r1为0.7,r2为0.5;粒子的数量n为整个群体中粒子的个数,直接影响了算法的搜索效率和性能,在某些实施例中设置较大的粒子数量通常会导致更好的搜索结果,但也会增加算法的计算成本,本实施例中n为50;迭代次数m是指pso算法进行迭代更新的次数,在每一次迭代中,粒子的位置和速度都会根据算法的更新规则进行调整,在某些实施例中设置较大的迭代次数有可能找到更优的解,本实施例中m为200。
9、所述步骤二,包括:将卫星支架的内部空间均匀分配给所有可变节点作为各个可变节点的可行域,且各个可变节点的可行域不相交;利用在各可变节点的可行域内随机采样,并将各个可变节点的坐标记录为节点变量;将随机采样的结果作为pso模型的求解目标,之后在所述pso模型中计算每个粒子的适应度,其中,为适应度函数,xi为第i节点变量的横坐标。
10、进一步的,在对卫星支架模型施加载荷之前,进行参数的自定义设定,自定义设定的参数包括:载荷f的施加位置和方向、单元的弹性模量e、单元的横截面积a和边界条件,其中,在所建立的卫星支架模型中,模型的节点包括可变节点和固定节点,模型的单元包括节点之间的连杆。其中,作为模型的单元的连杆的位置包括:可变节点与所述卫星支架模型的箱体底部的固定节点的链接、可变节点与所述卫星支架模型的支架底部固定节点的链接、所述卫星支架模型的箱体底部节点与支架底部节点的链接;固定节点包括:所述卫星支架模型的支架底部的7个固定节点和所述卫星支架模型的每个箱体底部的4个节点,固定节点的数量为19。例如:对卫星支架结构进行设计,根据卫星支架实际结构,自定义载荷f施加位置和方向,自定义节点和单元,自定义单元弹性模量e、横截面积a,并设计边界条件。其中需要满足:(1)设计的整体结构为静定或超静定结构,既支架整体自由度小于等于0;(2)如图5所示,单元为节点之间的连杆,本实施例节点包括n个可变节点、支架底部7个节点、每个箱体底部的4个节点,共19个固定节点,单元具体包括:可变节点与箱体底部固定节点的链接、可变节点与支架底部固定节点的链接、箱体底部节点与支架底部节点的链接,并设置各个单元的弹性模量e和横截面积a;(3)为支架底部的7个节点添加边界条件,设底座节点边界条件为固定。
11、所述步骤三中,所述在所建立的卫星支架模型上施加载荷,包括:将载荷施加在每个箱体底部的4个固定节点处,每个固定节点受到的载荷的大小相同,且方向都是竖直向下。
12、所述步骤四中,在优化可变节点的过程中,包括:将单元内力与单元长度之和相加得到的数值作为优化目标,并通过对比确认每个粒子的个体最优位置和全局最优位置,之后再更新粒子位置;其中:为第k次迭代粒子i飞行速度矢量的第d维分量,k为迭代次数,i为粒子编号,d为飞行速度矢量的维度分量编号,为第k次迭代粒子i位置矢量化的第d维分量,pbestid为粒子i个体经历过的最好位置,gbestd为种群所经历过的最好位置。
13、本发明实施例提供的基于pso的卫星支架轻量化优化方法,可以应用在卫星支架轻量化优化中的多节点杆系结构传力路径的寻优。其中,将卫星内部的n个可变节点坐标作为设计变量,在可行区域内进行随机采样。将变量n作为pso模型维度参数,结合卫星支架载荷情况和边界条件,实际应用中可以通过feon库进行有限元分析生成各个支杆的内力f,随后将计算出的的内力f、杆长之和作为优化目标重新代入到pso模型中进行迭代优化,得到n个可变节点前提下的轻量化最优解和可变节点的位置坐标。改变可变节点数量n,重复以上步骤,最后通过对比不同n个可变节点所对应的轻量化最优解,输出所有可能情况下的最优方案。依靠人工经验设计的方法费事费力且操作复杂,且很难找到最优可变节点数量及其对应的轻量化最优解。而现有的其他数字化方案则又存在算力成本高的问题,本方案在保证在优化设计要求得到实现的同时,实现了优化操作简便且计算负担低的效果。
本文地址:https://www.jishuxx.com/zhuanli/20241009/306264.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表