一种基于双跑道的减重和防跌倒方法和系统与流程
- 国知局
- 2024-10-15 09:32:58
本发明涉及下肢训练。更具体地,本发明涉及基于双跑道的减重和防跌倒方法和系统。
背景技术:
1、人体下肢可能由于各种灾祸、疾病或其他因素造成功能性障碍,而下肢障碍是指影响到人体下肢(包括腿部、脚部)功能的各种疾病、损伤或畸形,可以导致行走、站立、平衡等方面的问题,如最常见的车祸,也是最容易造成下肢受伤的情况,下肢在恢复过程中,经常需要大量的训练才能完全恢复正常。
2、目前有很多类似于跑步机的训练装置供患者进行训练,比如,患者站在训练装置的跑道上,然后训练装置启动后,跑道能够移动,使站立在跑道上的患者进行原地行走、原地抬腿等训练动作,以辅助患者训练。但是,有些患者的双腿障碍较重,有时无法自主的进行抬腿,导致其在进行原地行走、原地抬腿等训练动作时容易跌倒,使得训练过程存在较大的安全隐患,且训练效果较差。
3、因此,当前亟需解决的是目前辅助训练装置安全性低、训练效果差的问题。
技术实现思路
1、本发明提供一种基于双跑道的减重和防跌倒方法和系统,旨在解决相关技术中由于有些患者的双腿障碍较重,有时无法自主的进行抬腿,进而在进行原地行走、原地抬腿等训练动作时容易跌倒,患者容易受到伤害的问题。
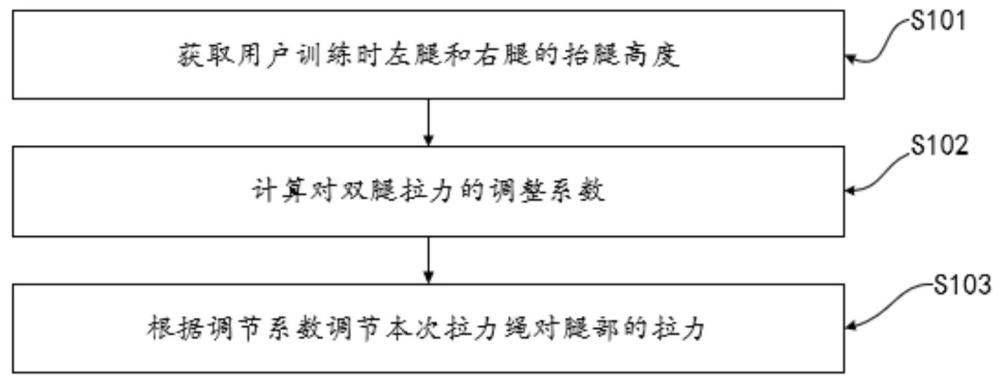
2、在第一方面中,本发明提供了基于双跑道的减重和防跌倒方法,包括:基于双跑道的减重和防跌倒方法,所述双跑道通过两个拉力绳分别绑定在患者的双腿上,以辅助患者的双腿进行减重训练,其特征在于,包括:获取用户训练时左腿和右腿的抬腿高度;确定上次训练时左腿和/或的抬腿高度与标准抬腿高度之间的差异值,并计算差异值和训练时间的乘积,以得到本次对双腿拉力的调整系数;根据调节系数和拉力绳的初始拉力,计算出本次拉力绳对腿部的拉力,以对患者的双腿进行减重,其中,所述调节系数与本次拉力绳对腿部的拉力呈正相关。
3、在一实施例中,获取用户训练时左腿和右腿的抬腿高度,包括:采集患者在单次抬腿时的视频,并进行分帧处理,得到连续帧图像;确定各帧图像中左腿关节点和右腿关节点与地面的距离;分别选取出左腿关节点和右腿关节点与地面距离最大的图像作为各腿的目标图像,并以各腿对应目标图像中关节点与地面之间的距离作为各腿的抬腿高度。
4、在一实施例中,获取用户训练时左腿和右腿的抬腿高度,还包括:分别将两个惯性测量单元绑定在患者的双腿,通过惯性测量单元可测出患者各腿的抬腿高度。在一实施例中,计算所述差异值和训练时间的乘积,以得到本次对腿部拉力的调整系数,调整系数的计算公式为:
5、=;
6、式中,表示调整系数,=1时,表示本次左腿拉力的调整系数;=2时,表示本次右腿拉力的调整系数;表示上次患者腿部的抬腿高度,=1时,表示左腿的抬腿高度;=2时,表示右腿的抬腿高度,表示标准抬腿高度,表示训练开始时刻与当前时刻之间的时间段。
7、在一实施例中,确定上次训练时左腿和/或右腿的抬腿高度与标准抬腿高度之间的差异值,包括:所述差异值等于左腿或右腿的抬腿高度与标准抬腿高度之间的差值,或左腿或右腿的抬腿高度与标准抬腿高度之间的差值与标准抬腿高度之间的比值。
8、在一实施例中,计算本次拉力绳对腿部的拉力,计算公式为:;式中,表示本次调节后对腿部的拉力,=1时,表示本次调节后左腿的拉力;=2时,表示调节后右腿的拉力,表示拉力绳的初始拉力,表示腿部的修正系数。
9、在一实施例中,根据调节系数和拉力绳的初始拉力,计算本次拉力绳对腿部的拉力,还包括:将调节系数与标准值相加后的值与初始拉力相乘,并将相乘后的值作为本次拉力绳对腿部的拉力。
10、在一实施例中,所述标准值等于1。
11、在一实施例中,还包括:响应于左腿的抬腿高度与右腿的抬腿高度存在差值,则调整拉力至左腿的抬腿高度与右腿的抬腿高度平齐。
12、本发明第二方面,还提供了一种基于双跑道的减重和防跌倒系统,包括处理器和存储器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序以实现以上任一项所述的基于双跑道的减重和防跌倒方法。
13、有益效果:根据患者抬腿训练时的情况,调节患者辅助训练时对腿部的拉力,基于患者上次的抬腿高度,自适应的调节本次对患者腿部的拉力,提高对患者双腿障碍训练的效果,并自动化的对患者腿部的拉力进行调节,提高了训练效率,且能够有效保证患者训练过程中的安全性。
技术特征:1.一种基于双跑道的减重和防跌倒方法,所述双跑道通过两个拉力绳分别绑定在患者的双腿上,以辅助患者的双腿进行减重训练,其特征在于,包括:
2.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,获取用户训练时左腿和右腿的抬腿高度,包括:
3.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,获取用户训练时左腿和右腿的抬腿高度,还包括:
4.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,计算所述差异值和训练时间的乘积,以得到本次对腿部拉力的调整系数,调整系数的计算公式为:
5.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,确定上次训练时左腿和/或右腿的抬腿高度与标准抬腿高度之间的差异值,包括:
6.根据权利要求4所述的基于双跑道的减重和防跌倒方法,其特征在于,计算本次拉力绳对腿部的拉力,计算公式为:
7.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,根据调节系数和拉力绳的初始拉力,计算本次拉力绳对腿部的拉力,还包括:
8.根据权利要求7所述的基于双跑道的减重和防跌倒方法,其特征在于,所述标准值等于1。
9.根据权利要求1所述的基于双跑道的减重和防跌倒方法,其特征在于,还包括:
10.一种基于双跑道的减重和防跌倒系统,包括处理器和存储器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序以实现如权利要求1-9任一项所述的基于双跑道的减重和防跌倒方法。
技术总结本发明涉及下肢训练技术领域,更具体地,本发明涉及一种基于双跑道的减重和防跌倒方法和系统,包括:基于双跑道的减重和防跌倒方法,所述双跑道通过两个拉力绳分别绑定在患者的双腿上,以辅助患者的双腿进行减重训练,其特征在于,包括:获取用户训练时左腿和右腿的抬腿高度;确定上次训练时左腿和/或的抬腿高度与标准抬腿高度之间的差异值,并计算差异值和训练时间的乘积,以得到本次对双腿拉力的调整系数。本发明根据患者抬腿训练时的情况,调节患者辅助训练时对腿部的拉力,基于患者上次的抬腿高度,自适应的调节本次对患者腿部的拉力,提高对患者双腿障碍训练的效果,并自动化的对患者腿部的拉力进行调节,提高了训练效率。技术研发人员:何永正,信焕玲,宋静,杨万营,李昊威受保护的技术使用者:河南翔宇医疗设备股份有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314534.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表