边坡位移监测方法、系统及计算机设备与流程
- 国知局
- 2024-10-15 09:37:15
本申请涉及边坡位移监测,具体涉及一种边坡位移监测方法、系统及计算机设备。
背景技术:
1、交通基础设施在我国经济的发展起着非常重要的作用,并且随着国民经济的发展,公路、铁路、桥梁、隧道、航道、码头、机场等各类交通基础设施的数量庞大,在建设和运营过程中由于受环境侵蚀、材料老化、荷载效应等因素的影响,将不可避免地导致结构系统的损伤累积和抗力衰减,严重者会由于结构破坏、变形加剧等造成重大事故。同时,我国是一个地质灾害大国,滑坡、泥石流等各种地质灾害的发生呈逐年递增的趋势。不管是基础设施领域还是地质灾害防治领域,变形监测都是一个重要的环节。
2、我国的变形监测大多数以传统的人工监测手段为主,利用传统的测量设备如全站仪、经纬仪、测斜仪等进行监测。人工监测频率低,实时性差,无法及时预警,受自然条件影响巨大,无法有效保障监测人员的人身安全,并且数据准确性和真实性受人为因素影响大而无法有效保证。因此,由人工监测向实时在线监测发展已成为变形监测领域的趋势。
3、目前最常用的在线边坡位移监测方法以基于gps/bds的监测技术为主,然而该方法的精度受到气候影响误差较大,精度很难达到工程实践应用的需求,并且该方法仅能监测单点的位移、沉降变化,无法实现边坡整体的监测。
4、需要说明的是,本背景技术部分中公开的以上信息仅用于理解本发明构思的背景技术,因此可以包含不构成现有技术的信息。
5、申请内容
6、针对现有技术的不足,本申请公开一种边坡位移监测方法、系统及计算机设备,能够解决现有监测方法受到气候影响误差大并且无法实现边坡整体的监测的问题。
7、为实现以上目的,本申请通过以下技术方案予以实现:
8、边坡位移监测方法,其中,包括以下步骤:
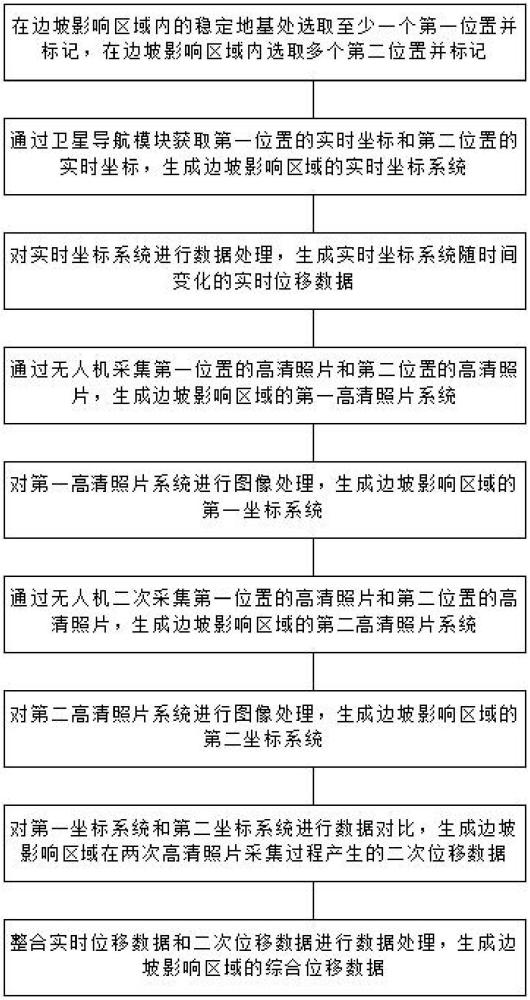
9、在边坡影响区域内的稳定地基处选取至少一个第一位置并标记,在边坡影响区域内选取多个第二位置并标记;
10、通过卫星导航模块获取第一位置的实时坐标和第二位置的实时坐标,生成边坡影响区域的实时坐标系统;
11、对实时坐标系统进行数据处理,生成实时坐标系统随时间变化的实时位移数据;
12、通过无人机采集第一位置的高清照片和第二位置的高清照片,生成边坡影响区域的第一高清照片系统;
13、对第一高清照片系统进行图像处理,生成边坡影响区域的第一坐标系统;
14、通过无人机二次采集第一位置的高清照片和第二位置的高清照片,生成边坡影响区域的第二高清照片系统;
15、对第二高清照片系统进行图像处理,生成边坡影响区域的第二坐标系统;
16、对第一坐标系统和第二坐标系统进行数据对比,生成边坡影响区域在两次高清照片采集过程产生的二次位移数据;
17、整合实时位移数据和二次位移数据进行数据处理,生成边坡影响区域的综合位移数据。
18、优选的技术方案,多个所述第二位置被设置为均匀的分布在第一位置的周围。
19、优选的技术方案,所述卫星导航模块被设置为对第一位置和第二位置进行静态监测,静态监测的监测时段被设置为大于60分钟。
20、优选的技术方案,对所述第一高清照片系统和进行的图像处理被设置为基于matlab对第一位置的坐标和第二位置的坐标进行提取并整合。
21、优选的技术方案,对所述第二高清照片系统和进行的图像处理被设置为基于matlab对第一位置的坐标和第二位置的坐标进行提取并整合。
22、另外,本申请还公开了边坡位移监测系统,其中,包括:
23、标记模块,所述标记模块用于在边坡影响区域内的稳定地基处选取至少一个第一位置并标记,在边坡影响区域内选取多个第二位置并标记;
24、卫星导航模块,所述卫星导航模块用于获取第一位置的实时坐标和第二位置的实时坐标并发送至处理模块;
25、无人机模块,所述无人机模块用于采集第一位置的高清照片和第二位置的高清照片并发送至处理模块;
26、处理模块,所述处理模块用于生成边坡影响区域的实时坐标系统、第一高清照片系统、第二高清照片系统,并对第一坐标系统和第二坐标系统进行数据对比,生成边坡影响区域在两次高清照片采集过程产生的二次位移数据,整合实时位移数据和二次位移数据进行数据处理,生成边坡影响区域的综合位移数据。
27、优选的技术方案,在所述第一位置和第二位置均设置有卫星导航接收机,所述卫星导航接收机用于卫星导航模块获取第一位置的实时坐标和第二位置的实时坐标。
28、优选的技术方案,在所述第一位置设置有基准桩,在所述基准桩设置有卫星导航接收机,在所述第二位置设置有监测桩,在所述监测桩设置有卫星导航接收机。
29、优选的技术方案,在第一位置和第二位置均设置有标识单元,所述标识单元用于无人机采集第一位置的高清照片和第二位置的高清照片。
30、另外,本申请还公开了计算机设备,包括存储器、处理器及存储在存储器上并且可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如上述技术方案所述的边坡位移监测方法。
31、本申请公开一种边坡位移监测方法、系统及计算机设备,具有以下优点:
32、本申请将卫星导航高精度定位技术与无人机靶向技术有机的结合起来,获取监测点的三维坐标,对边坡地质灾害进行准确监测。将监测点三维坐标实时监测数据传输到远程监测服务器和数据处理计算机,实时进行数据处理,获取边坡表面监测点的三维坐标随时位移变化情况。
33、本申请对边坡地质灾害进行准确检测及预报,可以提高监测边坡智能及预测效果,对边坡变形进行实时监控,准确预测边坡变形趋势及提前做好边坡位移及滑落等地质灾害,能使相关人员根据预警信息及时采取预防措施,同时提高了处于边坡附近人员安全性。
技术实现思路
技术特征:1.边坡位移监测方法,其中,包括以下步骤:
2.根据权利要求1所述的边坡位移监测方法,其中,多个所述第二位置被设置为均匀的分布在第一位置的周围。
3.根据权利要求1所述的边坡位移监测方法,其中,所述卫星导航模块被设置为对第一位置和第二位置进行静态监测,静态监测的监测时段被设置为大于60分钟。
4.根据权利要求1所述的边坡位移监测方法,其中,对所述第一高清照片系统和进行的图像处理被设置为基于matlab对第一位置的坐标和第二位置的坐标进行提取并整合。
5.根据权利要求1所述的边坡位移监测方法,其中,对所述第二高清照片系统和进行的图像处理被设置为基于matlab对第一位置的坐标和第二位置的坐标进行提取并整合。
6.边坡位移监测系统,其中,包括:
7.根据权利要求6所述的边坡位移监测系统,其中,在所述第一位置和第二位置均设置有卫星导航接收机,所述卫星导航接收机用于卫星导航模块获取第一位置的实时坐标和第二位置的实时坐标。
8.根据权利要求6所述的边坡位移监测系统,其中,在所述第一位置设置有基准桩,在所述基准桩设置有卫星导航接收机,在所述第二位置设置有监测桩,在所述监测桩设置有卫星导航接收机。
9.根据权利要求6所述的边坡位移监测系统,其中,在第一位置和第二位置均设置有标识单元,所述标识单元用于无人机采集第一位置的高清照片和第二位置的高清照片。
10.计算机设备,包括存储器、处理器及存储在存储器上并且可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如权利要求1至5任意一项所述的边坡位移监测方法。
技术总结本申请公开了一种边坡位移监测方法、系统及计算机设备。包括以下步骤:在边坡影响区域内选取第一位置和第二位置;获取第一位置和第二位置的实时坐标,生成实时坐标系统;对实时坐标系统进行数据处理,生成实时位移数据;采集第一位置和第二位置的高清照片,生成第一高清照片系统;对第一高清照片系统进行图像处理,生成第一坐标系统;二次采集第一位置和第二位置的高清照片,生成第二高清照片系统;对第二高清照片系统进行图像处理,生成第二坐标系统;对第一坐标系统和第二坐标系统进行数据对比,生成二次位移数据;整合实时位移数据和二次位移数据进行数据处理,生成综合位移数据。本申请能够解决现有监测方法误差大并且无法整体监测的问题。技术研发人员:周君林,车俊杰,黄丰,农智雄受保护的技术使用者:广西六宾高速公路建设发展有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表